TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064149
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173676
出願日
2023-10-05
発明の名称
慣性センサ
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人ゆうあい特許事務所
主分類
G01C
19/5691 20120101AFI20250410BHJP(測定;試験)
要約
【課題】微小振動体のリムと対向電極との当接および所定以下の距離への近接が抑制され、リムの振動振幅が制限されない構造の慣性センサを提供する。
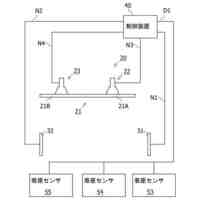
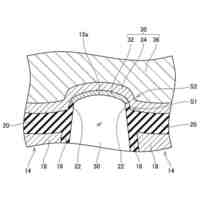
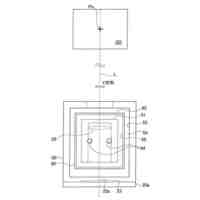
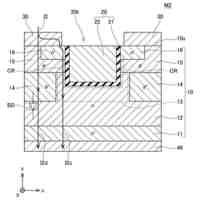
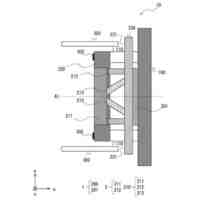
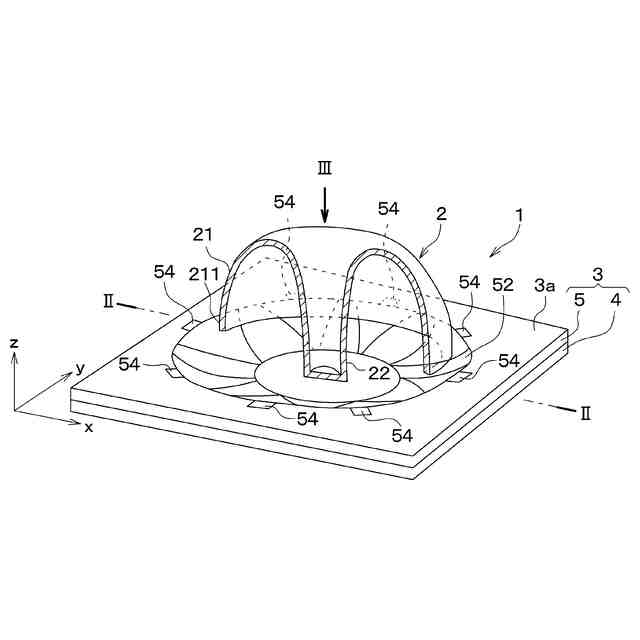
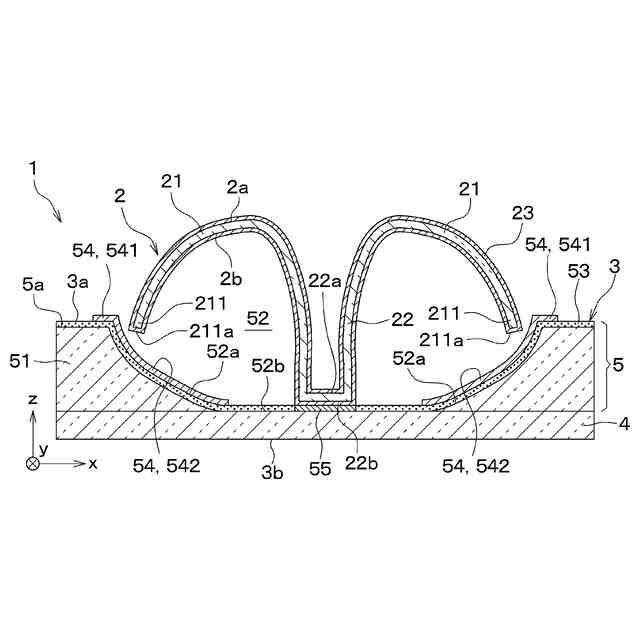
【解決手段】慣性センサ1は、凹部52を有する実装基板3に微小振動体2の一部が接続されてなる。微小振動体2は、半球状形状を有する曲面部21と、半球状形状の中心に向かって延設される接続部22とを有する。曲面部21のうち接続部22とは反対側の端部であるリム211は、実装基板3の凹部52上に位置し、実装基板3の複数の電極54と対向している。複数の電極54は、微小振動体2を共振モードで駆動させたときにリム211が描く振動軌跡VTおよびその延長線上とは交差しない位置に配置されている。
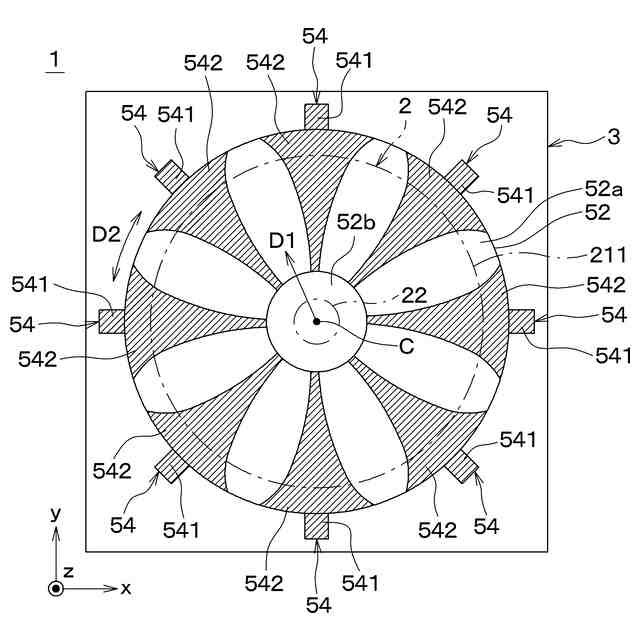
【選択図】図2
特許請求の範囲
【請求項1】
慣性センサであって、
半球状形状を有する曲面部(21)と、前記曲面部から前記半球状形状の中心に向かって延設される接続部(22)とを有する微小振動体(2)と、
前記曲面部のうち前記接続部とは反対側の端部をリム(211)として、前記接続部が接続される凹部(52)と、前記リムと対向する複数の電極(54)とを有する実装基板(3)と、を備え、
複数の前記電極は、前記微小振動体を共振モードで駆動させたときに前記リムが描く軌道を振動軌跡(VT)として、前記振動軌跡および前記振動軌跡の延長線とは交差しない位置に配置されている、慣性センサ。
続きを表示(約 940 文字)
【請求項2】
前記微小振動体のうち前記半球状形状の外径が大きい面を表面(2a)とし、前記表面とは反対側の面を裏面(2b)として、
前記凹部は、前記微小振動体の前記裏面の側と対向するとともに、前記振動軌跡に沿った半球状形状の湾曲面(52a)を有し、
複数の前記電極は、一部が前記湾曲面に形成されている、請求項1に記載の慣性センサ。
【請求項3】
複数の前記電極は、前記湾曲面に形成された部分を対向部(542)として、前記対向部が前記振動軌跡と平行である、請求項2に記載の慣性センサ。
【請求項4】
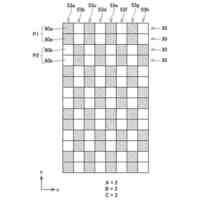
前記接続部のうち前記実装基板に接続される面を実装面(22b)とし、前記実装基板のなす平面方向のうち前記実装面の中心を通る径方向を基板径方向(D1)とし、前記実装面の中心を通る周方向を基板周方向(D2)として、
複数の前記電極は、前記基板径方向に沿って前記実装面の中心から遠ざかるにつれて、前記対向部の前記基板周方向における幅が変化する、請求項3に記載の慣性センサ。
【請求項5】
複数の前記電極は、前記基板径方向に沿って前記実装面の中心から遠ざかるにつれて前記対向部の前記基板周方向における幅が大きくなる第1電極(54A)と、前記基板径方向に沿って前記実装面の中心から遠ざかるにつれて、前記対向部の前記基板周方向における幅が小さくなる第2電極(54B)とを有する、請求項4に記載の慣性センサ。
【請求項6】
複数の前記電極は、前記基板周方向に沿って、前記第1電極と前記第2電極とが交互に繰り返し配列されている、請求項5に記載の慣性センサ。
【請求項7】
前記微小振動体のうち前記半球状形状の外径が大きい面を表面(2a)とし、前記表面とは反対側の面を裏面(2b)とし、前記リムのうち前記表面と前記裏面とを繋ぐ面を下面(211a)として、
前記リムは、前記下面が前記表面および前記裏面とは直交しない方向に傾斜するとともに、前記下面と前記表面とのなす角度(θ1)が鈍角、かつ前記下面と前記裏面とのなす角度(θ2)が鋭角である、請求項1ないし6のいずれか1つに記載の慣性センサ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、半球状形状を持つ微小振動体を備える慣性センサに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
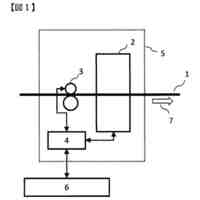
近年、車両の自動運転のシステム開発が進められており、この種のシステムでは、高精度の自己位置の推定技術が必要である。例えば、いわゆるレベル3の自動運転向けに、GNSSとIMUとを備える自己位置推定システムの開発が進められている。GNSSとは、Global Navigation Satellite Systemの略称である。IMUは、Inertial Measurement Unitの略称であり、例えば、3軸のジャイロセンサと3軸の加速度センサから構成される6軸の慣性センサである。将来的に、いわゆるレベル4以上の自動運転を実現するためには、現状よりもさらに高精度のIMUが求められる。
【0003】
このような高精度のIMUを実現するためのジャイロセンサとしては、例えば、BRGが有力視されており、ワイングラスモードで振動する略半球形状の三次元曲面を有する微小振動体が実装基板に搭載されてなる。BRGとは、Bird-bath Resonator Gyroscopeの略称である。この微小振動体は、振動の状態を表すQ値が10
6
以上に達するため、従来よりも高精度が見込まれる。この種の微小振動体を備える慣性センサとしては、例えば特許文献1に記載のものが挙げられる。
【先行技術文献】
【特許文献】
【0004】
米国特許第10612925号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
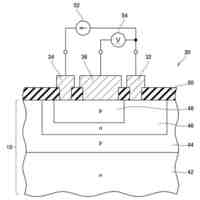
特許文献1に記載の慣性センサは、半球状形状を有する微小振動体を実装基板に搭載した後、微小振動体とこれに対向する複数の対向電極との間にこれらを一時的に繋ぐ犠牲層を設け、犠牲層の一部をエッチングして分離する工程を経て得られる。このため、この慣性センサは、微小振動体と複数の対向電極とのギャップが均一となり、これらの間における静電容量のバラツキが低減され、センサ精度が向上する。
【0006】
しかしながら、この慣性センサは、対向電極により微小振動体をワイングラスモードとなる共振周波数で振動させたとき、微小振動体のうち対向電極と向き合う端部、すなわちリムの部分が実装基板の実装面に対して水平方向および垂直方向の両方向に変位する。微小振動体のリムと実装基板の対向電極または実装面とが当接したり、当接せずとも所定以下の距離になったりすると、特に微小振動体のQ値が高い場合には、高精度化の妨げとなるため、この慣性センサは、リムの振動振幅が制限される。
【0007】
本開示は、上記の点に鑑み、微小振動体のリムと対向電極との当接および所定以下の距離に近接することが抑制され、リムの振動振幅が制限されない構造の慣性センサを提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示の1つの観点によれば、慣性センサは、半球状形状を有する曲面部(21)と、曲面部から半球状形状の中心に向かって延設される接続部(22)とを有する微小振動体(2)と、曲面部のうち接続部とは反対側の端部をリム(211)として、接続部が接続される凹部(52)と、リムと対向する複数の電極(54)とを有する実装基板(3)と、を備え、複数の電極は、微小振動体を共振モードで駆動させたときのリムが描く軌道を振動軌跡(VT)として、振動軌跡および振動軌跡の延長線とは交差しない位置に配置されている。
【0009】
この慣性センサは、半球状形状の曲面部と曲面部から半球状形状の中心に向かって延設される接続部とを有する微小振動体と、凹部を有する実装基板とを備え、微小振動体の接続部が凹部に接続されてなる。また、この慣性センサは、実装基板に複数の電極が形成され、複数の電極が、実装基板に接続された微小振動体を共振モードで振動させたときの曲面部の端部であるリムが描く振動軌跡およびその延長線とは交差しない位置に配置されている。これにより、慣性センサは、微小振動体を共振モードで振動させたときに、リムと電極とが当接すること、および所定以下の距離まで近接することが抑制されるため、リムの振動振幅が制限されない構造となっている。
【0010】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
診断装置
11日前
株式会社デンソー
駆動装置
4日前
株式会社デンソー
半導体装置
3日前
株式会社デンソー
電力変換装置
4日前
株式会社デンソーウェーブ
タグ通信装置
11日前
株式会社デンソー
熱交換システム
7日前
株式会社デンソー
車載用冷凍装置
5日前
株式会社デンソー
スイッチング素子
3日前
株式会社デンソーウェーブ
光学情報読取装置
11日前
株式会社デンソーテン
制御装置及び制御方法
3日前
株式会社デンソー
検出装置及びプログラム
3日前
株式会社デンソー
半導体装置とその製造方法
3日前
株式会社デンソー
通信システムおよび電子制御装置
11日前
株式会社デンソー
通信システムおよび電子制御装置
11日前
株式会社デンソー
スイッチング素子とその製造方法
3日前
株式会社デンソー
通信システムおよび電子制御装置
11日前
株式会社デンソー
開閉体制御装置、及び挟込検出方法
3日前
株式会社デンソーテン
学習装置、学習方法及び学習プログラム
11日前
株式会社デンソー
制御装置、制御方法、および制御プログラム
3日前
株式会社デンソーテン
運転支援装置、車載システム及び運転支援方法
11日前
株式会社デンソーテン
通信方法、通信装置、通信システム、及びプログラム
11日前
株式会社デンソーウェーブ
光学的情報読取装置及び光学的情報読取装置の製造方法
7日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
情報処理方法、情報処理装置、情報処理プログラム、記憶媒体
3日前
株式会社SOKEN
DCDCコンバータの制御装置及びプログラム
11日前
株式会社デンソーテン
スピーカ装置及びスピーカ装置を用いたパネル型スピーカの組み立て方法
5日前
株式会社デンソー
半導体装置およびその製造方法
3日前
株式会社デンソー
車両用制御装置及び車両用制御方法
11日前
株式会社豊田中央研究所
作業割当装置、作業割当方法、およびコンピュータプログラム
7日前
株式会社豊田中央研究所
電力変換装置
11日前
個人
粒子分析装置
11日前
株式会社イシダ
計量装置
5日前
個人
アクセサリー型テスター
12日前
東レ株式会社
シート状物の検査方法
26日前
株式会社テイエルブイ
振動検出装置
11日前
株式会社ミツトヨ
画像測定機
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ