TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071060
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2024184040
出願日
2024-10-18
発明の名称
技術的システムのための設計モデルを検証するための方法
出願人
ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング
,
ROBERT BOSCH GMBH
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05B
23/02 20060101AFI20250424BHJP(制御;調整)
要約
【課題】技術的システムのための設計モデルを検証するための方法を提供する。
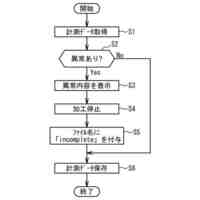
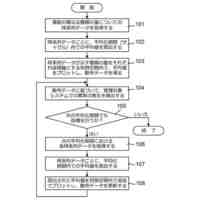
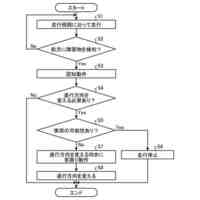
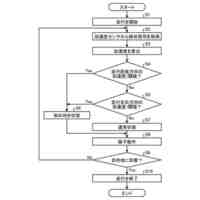
【解決手段】設計モデルは、技術的システムの少なくとも1つのパラメータと、少なくとも1つの外乱量とに対する許容範囲を定めるステップ(101)と、技術的システムへの検査信号の適用を開始するステップ(102)と、検査信号によってトリガされた、技術的システムの出力の検出を開始するステップ(103)と、状態に基づいて技術的システムの少なくとも1つのパラメータのそれぞれの値が決定される、ステップ(104)と、検査信号と、検出された出力と、特定された状態とに基づいて少なくとも1つの外乱量のそれぞれの値が決定されるステップ(105)と、技術的システムの少なくとも1つのパラメータのそれぞれの値と、少なくとも1つの外乱量のそれぞれの値とが、設計モデルの許容範囲と比較される、ステップ(106)とを含む。
【選択図】図1
特許請求の範囲
【請求項1】
技術的システム(1)のための設計モデル(2)を検証するための方法(100)であって、前記方法(100)は、
・前記技術的システム(1)をモデル化する設計モデル(2)を提供するステップ(101)であって、前記設計モデル(2)は、前記技術的システム(1)の少なくとも1つのパラメータと、少なくとも1つの外乱量とに対する許容範囲を定める、ステップ(101)と、
・前記技術的システム(1)への検査信号の適用を開始するステップ(102)と、
・前記検査信号によってトリガされた、前記技術的システム(1)の出力の検出を開始するステップ(103)と、
・前記検査信号と、検出された前記出力とに基づいて前記技術的システム(1)の状態を特定するステップ(104)であって、前記状態に基づいて前記技術的システム(1)の前記少なくとも1つのパラメータのそれぞれの値が決定される、ステップ(104)と、
・前記検査信号と、検出された前記出力と、特定された前記状態とに基づいて前記技術的システム(1)内の外乱を特定するステップ(105)であって、前記少なくとも1つの外乱量のそれぞれの値が決定される、ステップ(105)と、
・前記技術的システム(1)のための前記設計モデル(2)を検証するステップ(106)であって、前記技術的システム(1)の前記少なくとも1つのパラメータの前記それぞれの値と、前記少なくとも1つの外乱量の前記それぞれの値とが、前記設計モデル(2)の前記許容範囲と比較される、ステップ(106)と、
を含む、方法(100)。
続きを表示(約 1,300 文字)
【請求項2】
前記方法(100)は、
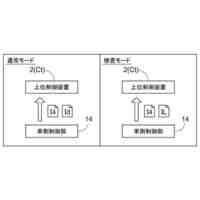
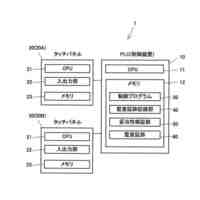
・前記技術的システム(1)の検出された前記出力を、外部のデータ処理装置(5)に伝送するステップ
をさらに含み、
前記状態の特定と、前記外乱の特定と、前記設計モデル(2)の検証とは、追加的に前記外部のデータ処理装置(5)によって実施される、請求項1に記載の方法(100)。
【請求項3】
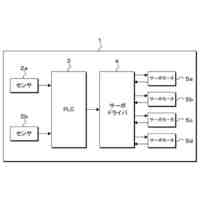
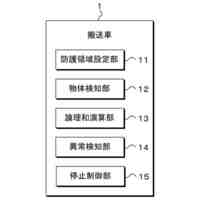
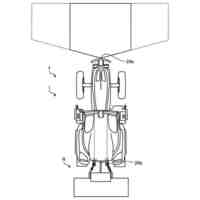
前記技術的システム(1)は、車両であり、
前記検査信号の適用は、前記車両の少なくとも1つのアクチュエータ(3)によって実施され、
前記検査信号によってトリガされた前記出力の検出は、前記車両の少なくとも1つのセンサ(4)によって実施される、請求項1又は2に記載の方法(100)。
【請求項4】
前記方法(100)は、
・前記検証(106)の結果に基づいて、前記技術的システム(1)及び/又は前記設計モデル(2)に影響を与える少なくとも1つの措置を実施するステップ
をさらに含む、請求項1乃至3のいずれか一項に記載の方法(100)。
【請求項5】
前記少なくとも1つの措置の実施は、
・前記技術的システム(1)の少なくとも1つの機能を調整するステップであって、前記調整することによって前記技術的システム(1)の確実性を高める、ステップ
を含む、請求項4に記載の方法(100)。
【請求項6】
前記少なくとも1つの措置の実施は、
・前記検証(106)の結果に基づいて前記設計モデル(2)を調整するステップであって、前記調整することによって前記技術的システム(1)のための前記設計モデル(2)を個別化する、ステップ
を含む、請求項4又は5に記載の方法(100)。
【請求項7】
前記設計モデル(2)は、前記技術的システム(1)を監視するための基準として使用され、前記技術的システム(1)のモデル化に基づいて特定され、
前記状態は、前記技術的システム(1)の少なくとも1つの物理的なエネルギ蓄積量を表し、前記外乱は、前記技術的システム(1)への少なくとも1つの環境影響を表す、請求項1乃至6のいずれか一項に記載の方法(100)。
【請求項8】
コンピュータプログラム(20)であって、前記コンピュータプログラム(20)がコンピュータ(10)によって実行された場合に、請求項1乃至7のいずれか一項に記載の方法(100)を前記コンピュータ(10)に実施させるための命令を含むコンピュータプログラム(20)。
【請求項9】
請求項1乃至7のいずれか一項に記載の方法(100)を実施するように構成されている、データ処理のための装置(10)。
【請求項10】
コンピュータ(10)によって実行された場合に、請求項1乃至7のいずれか一項に記載の方法(100)のステップを前記コンピュータ(10)に実施させるための命令を含むコンピュータ可読メモリ媒体(15)。
発明の詳細な説明
【技術分野】
【0001】
本発明は、技術的システムのための設計モデルを検証するための方法に関する。本発明はさらに、この目的のためのコンピュータプログラム、装置及びメモリ媒体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来技術
技術的システムのためのモデルに基づくコントローラ設計は、特に、制御されるべき技術的システムをモデル化するために開発フェーズにおいて使用された設計モデルに基づいている。特に、安定性及び確実性の保証を提供することを企図する場合には、設計モデルの内部の不確実性及び外乱を考慮することができ、これらの不確実性及び外乱を、パラメータセットとして記述することができ、このパラメータセット自体は、量に基づくものであってもよいし、又は、確率論的であってもよい。設計フェーズにおいて、技術的システムは、特に不確実性及び外乱を考慮して安定性及び確実性を保証することができるように、設計モデルを使用して、仮定されたパラメータセットを用いて設計される。
【0003】
一般的には、技術的システムの、特に制御システムのパラメータ識別のために、公称のパラメータ値を推定する種々異なるアルゴリズムが存在し、又は、不確実なパラメータのパラメータ分布を推定することができる不確実性定量化が存在する。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、技術的システムの現実の適用においては、設計モデルのパラメータに対する仮定が、現実の条件下での挙動に対応している間だけしか、安定性及び確実性の保証が得られない可能性がある。
【課題を解決するための手段】
【0005】
発明の開示
本発明の対象は、請求項1に記載の特徴を有する方法と、請求項8に記載の特徴を有するコンピュータプログラムと、請求項9に記載の特徴を有する装置と、請求項10に記載の特徴を有するコンピュータ可読メモリ媒体とである。本発明のさらなる特徴及び詳細は、それぞれの従属請求項、明細書及び図面から明らかとなる。この場合、本発明に係る方法に関連して説明されている特徴及び詳細は、当然、本発明に係るコンピュータプログラム、本発明に係る装置、及び、本発明に係るコンピュータ可読メモリ媒体との関連においても当てはまり、それぞれ逆もまた同様であり、したがって、本発明の個々の態様についての開示は、常に相互に参照され、又は、相互に参照され得る。
【0006】
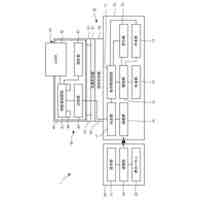
本発明の対象は、特に、技術的システムのための設計モデルを検証するための方法であり、本方法は、以下に記載するステップを含み、これらのステップは、繰り返し及び/又は相前後して実施されるものとしてよい。技術的システムは、特に、少なくとも1つの制御回路を含む。技術的システムは、制御システムであるものとしてもよい。
【0007】
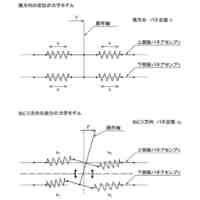
第1のステップにおいては、好ましくは技術的システムをモデル化する設計モデルが提供される。設計モデルは、特に、技術的システムの少なくとも1つのパラメータと、少なくとも1つの外乱量とに対する許容範囲を定める。許容範囲は、例えば、少なくとも1つのパラメータ又は少なくとも1つの外乱量に対する、それぞれ1つの最小値及び最大値、又は、確率分布であるものとしてよい。少なくとも1つのパラメータは、例えば、車両の質量、少なくとも1つの外乱量、例えば外乱力であるものとしてよい。許容範囲は、少なくとも1つのパラメータ又は少なくとも1つの外乱量に対する仮定として理解されるものとしてもよく、例えば、経験値に基づくものとしてもよいし、又は、テストによって特定されるものとしてもよい。
【0008】
さらなるステップにおいては、好ましくは技術的システムへの検査信号の適用が開始される。検査信号は、例えば、技術的システムにおける、又は、技術的システムの制御回路における操作量の値であるものとしてよい。
【0009】
さらなるステップにおいては、好ましくは検査信号によってトリガされた、技術的システムの出力の検出が開始される。出力は、例えば、技術的システムにおける又は技術的システムの制御回路における操作量であるものとしてもよいし、又は、技術的システムのセンサの測定値であるものとしてもよい。
【0010】
さらなるステップにおいては、好ましくは検査信号と、検出された出力とに基づいて技術的システムの状態が特定され、この状態に基づいて技術的システムの少なくとも1つのパラメータのそれぞれの値が決定される。状態は、少なくとも1つのパラメータ、特に複数のパラメータの現在の値に基づく又はこれらを含む状態ベクトルとして存在し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
19日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社タブチ
減圧弁
13日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
3日前
株式会社ダイヘン
搬送車
1か月前
井関農機株式会社
作業車両
27日前
株式会社デンソー
診断装置
17日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
1か月前
株式会社アイシン
自律移動体
3日前
株式会社アイシン
自律移動体
3日前
FCLコンポーネント株式会社
電源回路および検出装置
13日前
株式会社アイシン
自律移動体
3日前
株式会社アイシン
自律移動体
3日前
株式会社マキタ
作業ロボット
19日前
ファナック株式会社
機械プログラミング方法
9日前
ダイハツ工業株式会社
無人搬送車の制御方法
1か月前
岩井ファルマテック株式会社
監査証跡の管理システム
1か月前
ローム株式会社
電源起動監視回路
1か月前
ローム株式会社
レギュレータ回路
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ