TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025072850
公報種別
公開特許公報(A)
公開日
2025-05-12
出願番号
2023183250
出願日
2023-10-25
発明の名称
自動列車運転装置、方法及びプログラム
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60L
15/40 20060101AFI20250501BHJP(車両一般)
要約
【課題】ノッチを変更し終わるまでの煩雑な予測計算や、走行試験の繰り返しによる手作業での調整を行うことなく、力行から目標速度での定速走行に乗り心地良く移行することを可能とする。
【解決手段】実施形態の自動列車運転装置は、列車の速度と位置を検出する列車速度位置検出部と、路線情報、車両情報を記憶する記憶部と、少なくとも列車速度位置検出部の検出結果と、記憶部に記憶された路線情報、車両情報とに基づいて、駆動/制動制御装置へ出力する制御指令を算出する制御指令算出部と、を備えた自動列車運転装置において、制御指令算出部は、列車の現在速度から目標速度まで所定時間で達するときの加速度を加速度しきい値とし、制御指令を算出するに際し、制御指令に対応する列車の加速度が加速度しきい値を超えないように補正する。
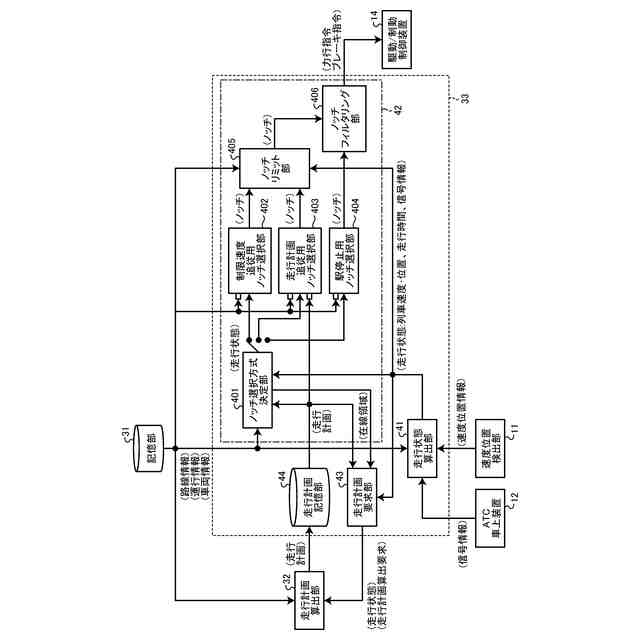
【選択図】図2
特許請求の範囲
【請求項1】
列車の速度と位置を検出する列車速度位置検出部と、
路線情報、車両情報を記憶する記憶部と、
少なくとも前記列車速度位置検出部の検出結果と、前記記憶部に記憶された路線情報、車両情報とに基づいて、駆動/制動制御装置へ出力する制御指令を算出する制御指令算出部と、を備えた自動列車運転装置において、
前記制御指令算出部は、列車の現在速度から目標速度まで所定時間で達するときの加速度を加速度しきい値とし、
前記制御指令を算出するに際し、前記制御指令に対応する前記列車の加速度が前記加速度しきい値を超えないように補正する、
自動列車運転装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の自動列車運転装置において、
前記制御指令算出部は、列車の現在速度から目標速度まで所定時間で達するときの加速度に抵抗による加速度を加算した加速度を前記加速度しきい値として算出する、
自動列車運転装置。
【請求項3】
請求項1に記載の自動列車運転装置において、
前記制御指令算出部は、目標速度より所定の余裕速度だけ高い速度まで所定時間で達するときの加速度を前記加速度しきい値として算出する、
自動列車運転装置。
【請求項4】
請求項1又は請求項2に記載の自動列車運転装置において、
前記制御指令算出部は、前記加速度しきい値の算出に用いる所定時間を、選択可能な最低ノッチに対応する加速度に基づいて変更する、
自動列車運転装置。
【請求項5】
請求項4に記載の自動列車運転装置において、
前記制御指令算出部は、複数の速度域でそれぞれ選択可能な最低ノッチに対応する加速度に応じて所定時間を記憶しておき、列車速度に応じた所定時間を読みだして加速度しきい値の算出に用いる、
自動列車運転装置。
【請求項6】
請求項4に記載の自動列車運転装置において、
前記制御指令算出部は、複数の速度でそれぞれ選択可能な最低ノッチに対応する加速度に応じて所定時間を記憶しておき、列車速度近傍の2つの速度に応じた所定時間を読みだして按分し加速度しきい値の算出に用いる、
自動列車運転装置。
【請求項7】
請求項1乃至請求項3の何れか一項に記載の自動列車運転装置において、
前記制御指令算出部は、列車の現在速度から目標速度または目標速度より所定の余裕速度だけ低い速度まで所定時間で達するときの減速度を減速度しきい値として算出し、
前記駆動/制動制御装置への制御指令を、制御指令に対応する減速度が減速度しきい値を超えないように補正する、
自動列車運転装置。
【請求項8】
列車の速度と位置を検出する列車速度位置検出部と、路線情報、車両情報を記憶する記憶部と、少なくとも前記列車速度位置検出部の検出結果と、前記記憶部に記憶された路線情報、車両情報とに基づいて、駆動/制動制御装置へ出力する制御指令を算出する制御指令算出部と、を備えた自動列車運転装置において実行される方法であって、
前記制御指令算出部は、列車の現在速度から目標速度まで所定時間で達するときの加速度を加速度しきい値として算出する過程と、
前記制御指令を算出するに際し、前記制御指令に対応する前記列車の加速度が前記加速度しきい値を超えないように補正する過程と、
を備えた方法。
【請求項9】
列車の速度と位置を検出する列車速度位置検出部と、路線情報、車両情報を記憶する記憶部と、少なくとも前記列車速度位置検出部の検出結果と、前記記憶部に記憶された路線情報、車両情報とに基づいて、駆動/制動制御装置へ出力する制御指令を算出する制御指令算出部と、を備えた自動列車運転装置をコンピュータにより制御するためのプログラムであって、
前記コンピュータを、
列車の現在速度から目標速度まで所定時間で達するときの加速度を加速度しきい値として算出する手段と、
前記制御指令を算出するに際し、前記制御指令に対応する前記列車の加速度が前記加速度しきい値を超えないように補正する手段と、
して機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、自動列車運転装置、方法及びプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
自動列車運転装置(以下、ATO装置という)は、信号現示速度を超えない範囲で列車を走行させ、駅の所定位置に停止させるよう、力行(加速)/ブレーキ指令を算出する。
【0003】
ATO装置では、力行/ブレーキ指令をノッチと呼ばれる離散値で算出する場合が多い。ノッチを一度に大きく変更すると加速度が急激に変化し乗り心地が悪化するので、加速度の急激な変化を抑制するため、ノッチを段階的に変更し、加速度変化率を抑制する処理が広く行われている。
【先行技術文献】
【特許文献】
【0004】
特開2013-172475号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術においては、目標速度に達するまでにノッチを変更し終わらずに目標速度を超過し、制限速度をも超過してしまう虞があった。これを回避するため、早めにノッチを変更し始めることにより、目標速度に達しない虞もあった。
そこで、ノッチを変更し終わったタイミングでちょうど目標速度になるように予測計算を行ったり、予め走行試験の結果に基づいて、ノッチを変更し始める速度を決めたりすることが考えられるが、走行中の処理負荷が増えたり、事前の手間が増えたりするという課題が生じる。
【0006】
本発明は、上記に鑑みてなされたものであって、ノッチを変更し終わるまでの煩雑な予測計算や、走行試験の繰り返しによる手作業での調整を行うことなく、力行から目標速度での定速走行に乗り心地良く移行することを可能とする自動列車運転装置、方法及びプログラムを提供することを目的としている。
【課題を解決するための手段】
【0007】
実施形態の自動列車運転装置は、列車の速度と位置を検出する列車速度位置検出部と、路線情報、車両情報を記憶する記憶部と、少なくとも列車速度位置検出部の検出結果と、記憶部に記憶された路線情報、車両情報とに基づいて、駆動/制動制御装置へ出力する制御指令を算出する制御指令算出部と、を備えた自動列車運転装置において、制御指令算出部は、列車の現在速度から目標速度まで所定時間で達するときの加速度を加速度しきい値とし、制御指令を算出するに際し、制御指令に対応する列車の加速度が加速度しきい値を超えないように補正する。
【図面の簡単な説明】
【0008】
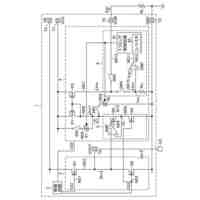
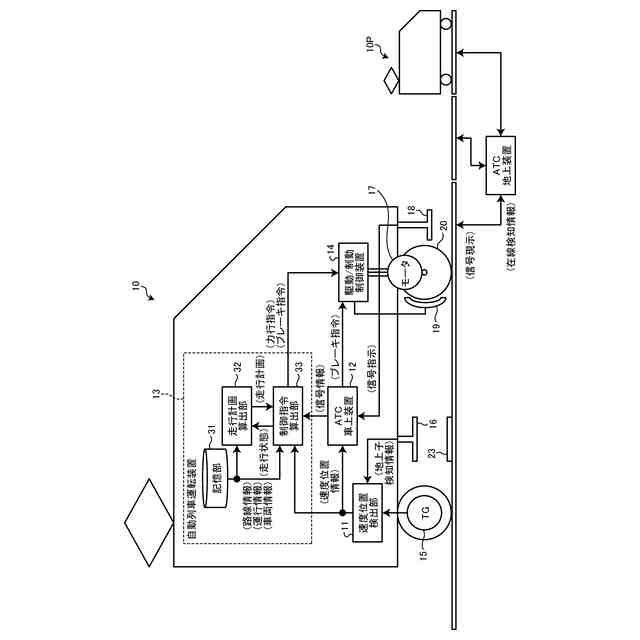
図1は、実施形態の自動列車運転装置の構成を示す図である。
図2は、制御指令算出部の詳細構成例の説明図である。
図3は、制御指令算出部の処理フローチャートである。
図4は、ノッチリミット部の処理フローチャートである。
図5は、車両特性としての力行ノッチ毎の引張力特性の説明図である。
図6は、制限速度よりも十分低い速度で力行から惰行走行に移行する場合のノッチ選択処理の説明図である。
図7は、力行から定速走行に移行する場合のノッチ選択処理の説明図である。
図8は、制限速度が下がる場所において、ブレーキによる減速から定速走行に移行する場合のノッチ選択処理の説明図である。
図9は、低速域では1ノッチを除くすべてのノッチで最大加速度となる引張力特性を有する車両で、力行から低速での定速走行に移行する場合のノッチ選択処理の説明図(その1)である。
図10は、低速域では1ノッチを除くすべてのノッチで最大加速度となる引張力特性を有する車両で、力行から低速での定速走行に移行する場合のノッチ選択処理の説明図(その2)である。
図11は、引張力特性に基づいて、速度域毎に選択可能な最小ノッチと惰行ノッチとの加速度が大きくなるほど、基準時間を短く設定した場合の説明図である。
【発明を実施するための形態】
【0009】
実施形態の自動列車運転装置について、図面を参照しながら説明する。
図1は、実施形態の自動列車運転装置の構成を示す図である。
列車10は、図1に示すように、速度位置検出部11、ATC車上装置12、自動列車運転装置13、及び駆動/制動制御装置14を備えている。
【0010】
速度位置検出部11は、速度発電機(TG)15のパルスや、地上子23から車上子16を介して受信する地上子検知情報に基づいて、列車10の速度と位置を検出する。
ATC車上装置12は、速度位置検出部11からの速度位置情報及びATC地上装置21からの信号現示に基づいて、列車が先行列車に衝突したり脱線したりしないためのブレーキ指令を出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
1か月前
株式会社東芝
受光装置
1か月前
株式会社東芝
回転電機
20日前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
20日前
株式会社東芝
電解装置
1か月前
株式会社東芝
測距装置
1か月前
株式会社東芝
回転電機
20日前
株式会社東芝
回転電機
1か月前
株式会社東芝
発振回路
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
27日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ