TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025075311
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186373
出願日
2023-10-31
発明の名称
運転支援装置
出願人
株式会社アイシン
代理人
弁理士法人ネクスト
主分類
B60W
30/095 20120101AFI20250508BHJP(車両一般)
要約
【課題】カーブ区間を走行する際に急な旋回や減速が行われることを抑制し、且つ正しい車両姿勢で一時停止を行うことが可能な走行軌道を車両の走行が推奨される走行軌道として生成することを可能にした運転支援装置を提供する。
【解決手段】車両が走行する走行予定経路を取得し、特に取得した走行予定経路にカーブを含む場合に、カーブ区間において車両が走行可能な走行可能領域を取得するとともに、カーブ区間を対象にして、走行可能領域内を通って開始ベクトルから終了ベクトルへと到る走行軌道を、車両の走行が推奨される走行軌道として生成し、生成された走行軌道に基づいて車両の運転支援を行う一方で、特にカーブ区間に一時停止が必要とされる或いは一時停止が推奨される地点が含まれる場合には、該地点を含む一時停止エリアにおける走行可能領域はその前後よりも道路幅方向が狭く設定されるように構成する。
【選択図】図22
特許請求の範囲
【請求項1】
車両が走行する走行予定経路を取得する走行予定経路取得手段と、
前記走行予定経路にカーブを含む場合に、前記カーブを含むカーブ区間を前記車両が前記走行予定経路に沿って走行した場合の前記カーブ区間の始点における車両の位置と方位を特定した開始ベクトルを取得する開始ベクトル取得手段と、
前記カーブ区間を前記車両が前記走行予定経路に沿って走行した場合の前記カーブ区間の終点における車両の位置と方位を特定した終了ベクトルを取得する終了ベクトル取得手段と、
地図情報を用いて前記カーブ区間において車両が走行可能な走行可能領域を取得する走行可能領域取得手段と、
前記カーブ区間を対象にして、前記走行可能領域内を通って前記開始ベクトルから前記終了ベクトルへと到る走行軌道を、車両の走行が推奨される走行軌道として生成する走行軌道生成手段と、
前記走行軌道生成手段によって生成された走行軌道に基づいて車両の運転支援を行う運転支援手段と、を有し、
前記カーブ区間に一時停止が必要とされる或いは一時停止が推奨される地点が含まれる場合に、該地点を含む一時停止エリアにおける前記走行可能領域はその前後よりも道路幅方向が狭く設定される運転支援装置。
続きを表示(約 440 文字)
【請求項2】
前記一時停止エリアの進行方向の長さは、車両の車長に基づいて決定される請求項1に記載の運転支援装置。
【請求項3】
前記走行軌道生成手段は、
前記走行可能領域内を通って前記開始ベクトルから前記終了ベクトルへと到る複数の走行軌道の候補に対してコストを算出し、
算出されたコストを比較して前記複数の走行軌道の候補の内から車両の走行が推奨される走行軌道を選択して生成する請求項1又は請求項2に記載の運転支援装置。
【請求項4】
前記カーブ区間を対象にして、車両が走行する予定の車線の中心線に沿って配置された座標点よりもカーブ内側にある前記走行可能領域内に、通過点を設定する通過点設定手段を有し、
前記走行軌道生成手段は、前記走行可能領域内を通って且つ前記開始ベクトルから前記通過点を通過して前記終了ベクトルへと到る走行軌道を、車両の走行が推奨される走行軌道として生成する請求項1又は請求項2に記載の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転を支援する運転支援装置に関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
近年、車両の走行形態として、ユーザの運転操作に基づいて走行する手動走行以外に、ユーザの運転操作の一部又は全てを車両側で実行することにより、ユーザによる車両の運転を補助する自動運転支援システムについて新たに提案されている。自動運転支援システムでは、例えば、車両の現在位置、車両が走行する車線、周辺の他車両の位置を随時検出し、予め設定された経路に沿って走行するようにステアリング、駆動源、ブレーキ等の車両制御が自動で行われる。
【0003】
また、上記自動運転支援による走行を行う場合やその他の車両に対する各種運転支援を行う場合において、車両の走行予定経路や地図情報等に基づいて走行が推奨される走行軌道を車両が走行する道路上に予め生成することが行われている。例えば国際公開第2021/059601号には、交差点内や車線変更を行う区間以外について車両が走行する車線の中央に対して走行が推奨される走行軌道を生成し、生成した走行軌道に従って走行するように車両を制御する技術について開示されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2021/059601号(段落0081)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、上記特許文献1に開示された技術では、交差点内等の一部区間を除いて基本的に車両が走行する車線の中央に対して走行が推奨される走行軌道を生成する。従って、道路が所定の角度で屈曲したり所定の曲率で円弧状に曲がる形状を含む区間(以下、カーブ区間という)に対しても車両が走行する車線の中央に対して走行が推奨される走行軌道が生成されていた。しかしながら、上記のようなカーブ区間においては車線の中央を走行する軌道が必ずしも車両にとって推奨される走行軌道となるとは限らず、例えば急な旋回や減速を伴う軌道となる可能性があった。
【0006】
一方で、図29に示すように車線の中央に限定することなく車両が走行可能な範囲内で自在に走行軌道201を生成すると、カーブ区間内に例えば一時停止の規制や横断歩道などの一時停止が必要とされる或いは一時停止が推奨される地点が含まれる場合に、走行軌道201に沿って走行する車両202が道路端で一時停止したり、道路の進行方向に対して大きく傾斜して一時停止しなければならない状況が生じる。そのような車両姿勢で一時停止すると安全の確認を正しく行うことができない問題があった。
【0007】
本発明は前記従来における問題点を解消するためになされたものであり、カーブ区間を走行する際に急な旋回や減速が行われることを抑制し、且つ正しい車両姿勢で一時停止を行うことが可能な走行軌道を生成することが可能となり、車両の乗員に負担を生じさせない適切な運転支援を実施することを可能にした運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため本発明に係る運転支援装置は、車両が走行する走行予定経路を取得する走行予定経路取得手段と、前記走行予定経路にカーブを含む場合に、前記カーブを含むカーブ区間を前記車両が前記走行予定経路に沿って走行した場合の前記カーブ区間の始点における車両の位置と方位を特定した開始ベクトルを取得する開始ベクトル取得手段と、前記カーブ区間を前記車両が前記走行予定経路に沿って走行した場合の前記カーブ区間の終点における車両の位置と方位を特定した終了ベクトルを取得する終了ベクトル取得手段と、地図情報を用いて前記カーブ区間において車両が走行可能な走行可能領域を取得する走行可能領域取得手段と、前記カーブ区間を対象にして、前記走行可能領域内を通って前記開始ベクトルから前記終了ベクトルへと到る走行軌道を、車両の走行が推奨される走行軌道として生成する走行軌道生成手段と、前記走行軌道生成手段によって生成された走行軌道に基づいて車両の運転支援を行う運転支援手段と、を有し、前記カーブ区間に一時停止が必要とされる或いは一時停止が推奨される地点が含まれる場合に、該地点を含む一時停止エリアにおける前記走行可能領域はその前後よりも道路幅方向が狭く設定される。
尚、「カーブ」とは、道路が所定の曲率で円弧状に曲がる形状に加えて、直角などの所定の角度で屈曲する形状(例えばL字路)についても含む。また、道路の形状が円弧やL字となっていなかったとしても、車両が走行する道路を繋いだ形状が円弧やL字となっていれば(例えばT字路や交差点で右左折する場合についても)「カーブ」を含むとしても良い。また、公道だけではなく駐車場の通路などの施設内で車両が走行する経路についても走行予定経路に含む。
【発明の効果】
【0009】
前記構成を有する本発明に係る運転支援装置によれば、カーブ区間に一時停止が必要とされる或いは一時停止が推奨される地点が含まれる場合に、該地点において車両が走行可能な領域を狭く設定して走行軌道を生成することで、カーブ区間を走行する際に急な旋回や減速が行われることを抑制し、且つ正しい車両姿勢で一時停止を行うことが可能な走行軌道を生成することが可能となる。その結果、車両の乗員に負担を生じさせない適切な運転支援を実施することが可能となる。
【図面の簡単な説明】
【0010】
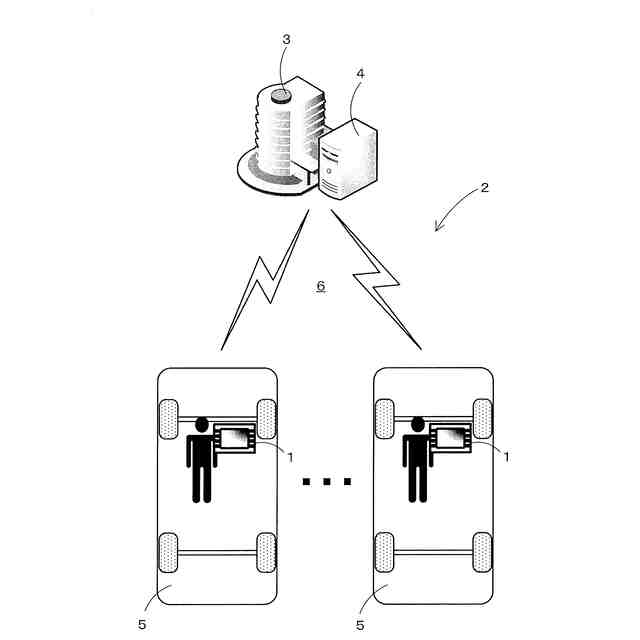
本実施形態に係る運転支援システムを示した概略構成図である。
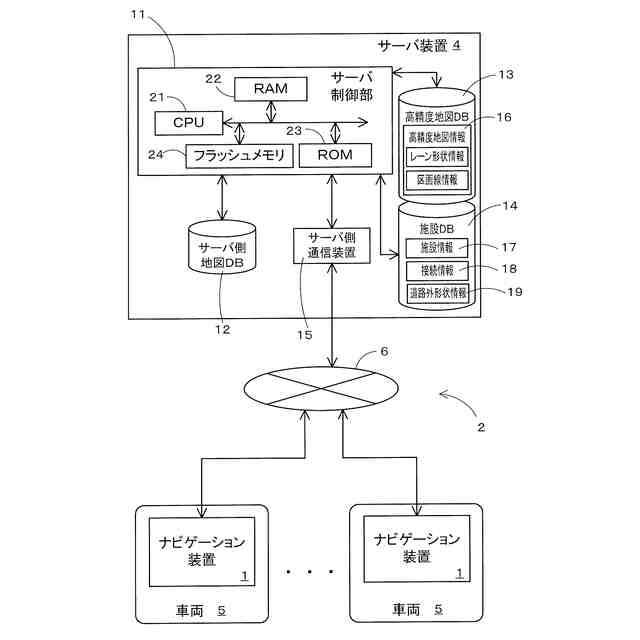
本実施形態に係る運転支援システムの構成を示したブロック図である。
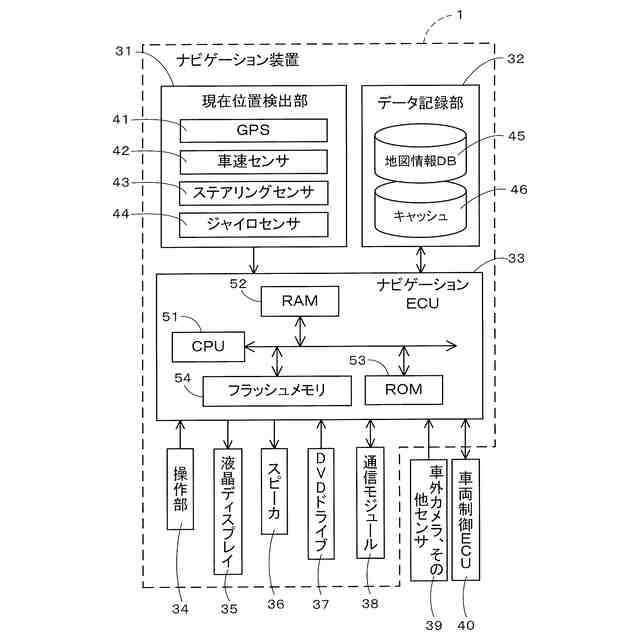
本実施形態に係るナビゲーション装置を示したブロック図である。
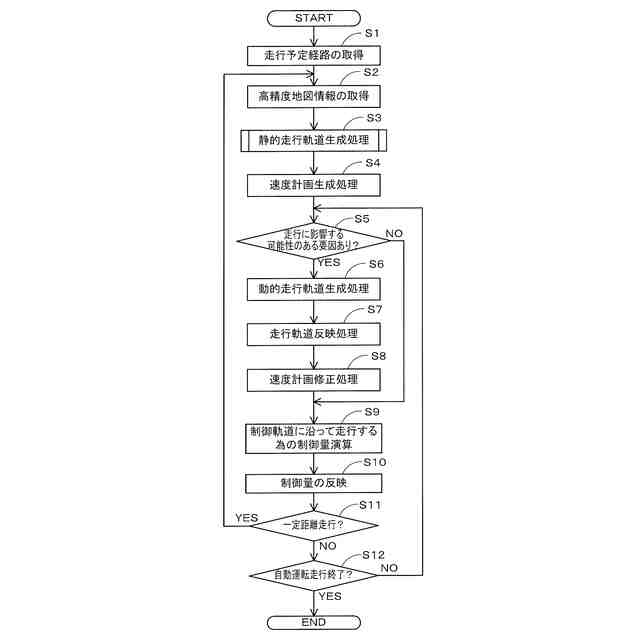
本実施形態に係る自動運転支援プログラムのフローチャートである。
高精度地図情報の取得されるエリアを示した図である。
動的走行軌道の算出方法について説明した図である。
静的走行軌道生成処理のサブ処理プログラムのフローチャートである。
車両の走行予定経路の一例を示した図である。
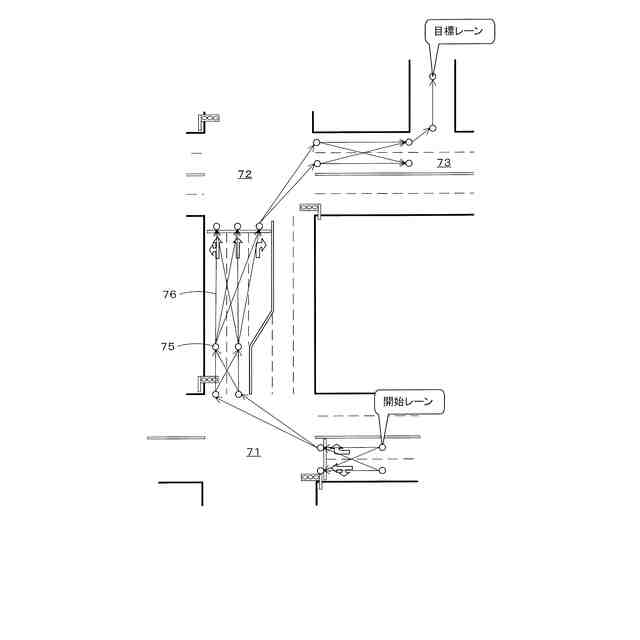
図8に示す走行予定経路に対して構築されたレーンネットワークの一例を示した図である。
カーブ区間の走行軌道生成処理のサブ処理プログラムのフローチャートである。
カーブ区間の走行軌道生成処理のサブ処理プログラムのフローチャートである。
連続しないカーブを含むカーブ区間の一例を示した図である。
連続する複数のカーブを含むカーブ区間の一例を示した図である。
一時停止点と一時停止エリアについて示した図である。
一時停止エリアにおける走行可能領域について示した図である。
クリッピングポイントの設定方法について説明した図である。
開始ベクトル及び終了ベクトルを複数化する例について説明した図である。
開始ベクトル及び終了ベクトルを各ベクトルの進行方向に通過する最も大きい曲率半径の円弧が車両の走行する車線内に含まれる場合を説明した図である。
開始ベクトル及び終了ベクトルを各ベクトルの進行方向に通過する最も大きい曲率半径の円弧が車両の走行する車線内に含まれない場合を説明した図である。
カーブ区間に対して生成される走行軌道の候補を示した図である。
第2の走行軌道及び第3の走行軌道の生成方法を示した図である。
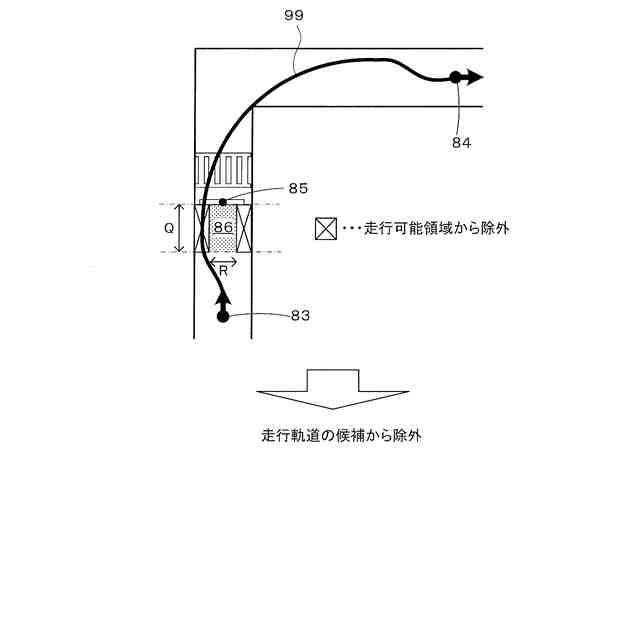
カーブ区間に対して生成された走行軌道が候補から除外される例を示した図である。
曲折方向が異なる方向となる複数のカーブが連続するカーブ区間に対して設定される連結点を示した図である。
曲折方向が同方向となる複数のカーブが連続するカーブ区間に対して設定される連結点を示した図である。
曲折方向が異なる方向となる複数のカーブが連続するカーブ区間を中間点で分割した場合に、各区間に設定される開始ベクトル及び終了ベクトルを示した図である。
曲折方向が同方向となる複数のカーブが連続するカーブ区間を中間点で分割した場合に、各区間に設定される開始ベクトル及び終了ベクトルを示した図である。
開始ベクトル及び終了ベクトルを複数化する例について説明した図である。
走行軌道を円滑化する為の補正例を示した図である。
従来技術の問題点を説明した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ