TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025078982
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191352
出願日
2023-11-09
発明の名称
遠隔走行システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/00 20060101AFI20250514BHJP(車両一般)
要約
【課題】操作者に遠隔操作に集中させることができる遠隔走行システムを提供する。
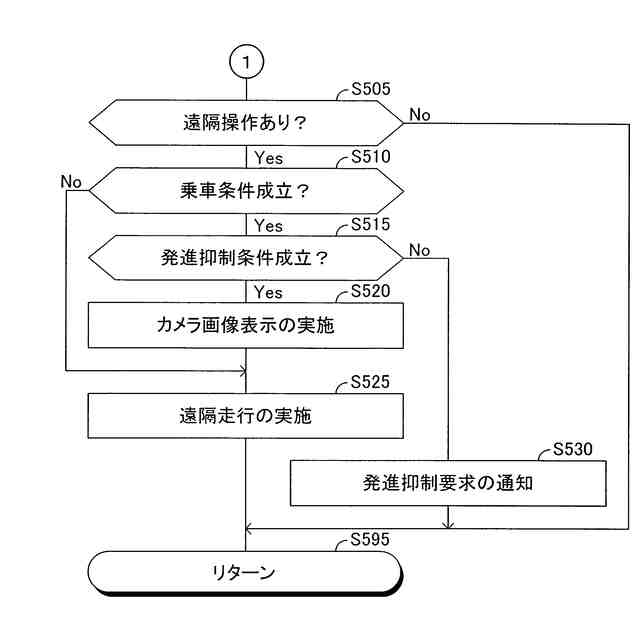
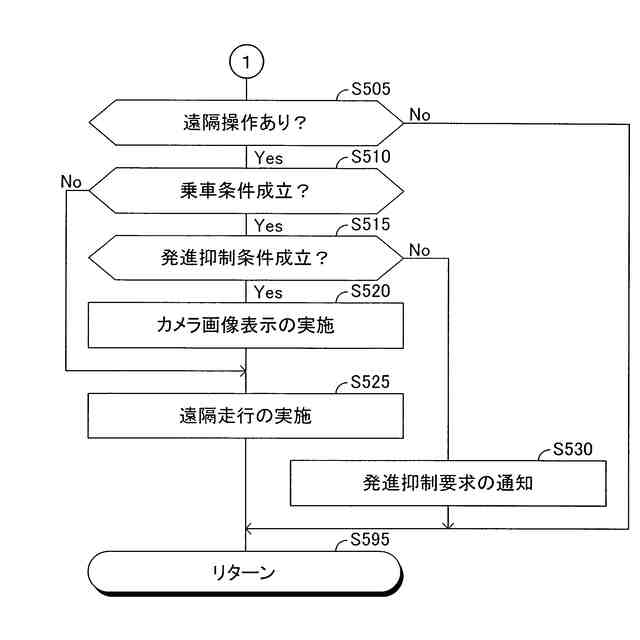
【解決手段】遠隔走行システム10は、操作端末199を用いた遠隔操作により車両200を走行させる。遠隔走行システムは、遠隔操作を行う操作者が遠隔操作により走行させる車両である対象車両200Tとは異なる車両である非対象車両200Nに乗車しているとの乗車条件が成立しているときには、非対象車両が停車しており且つ動き出さない状態にあるとの発進抑制条件が成立している場合、遠隔操作により対象車両が走行されることを許可する。
【選択図】 図5
特許請求の範囲
【請求項1】
操作端末を用いた遠隔操作により車両を走行させる遠隔走行システムにおいて、
前記遠隔操作を行う操作者が当該遠隔操作により走行させる車両である対象車両とは異なる車両である非対象車両に乗車しているとの乗車条件が成立しているときには、該非対象車両が停車しており且つ動き出さない状態にあるとの発進抑制条件が成立している場合、前記遠隔操作により前記対象車両が走行されることを許可するように構成されている遠隔走行システム。
続きを表示(約 540 文字)
【請求項2】
請求項1に記載の遠隔走行システムにおいて、
前記乗車条件は、前記非対象車両の駆動装置が作動状態にあるとの条件を含んでいる、
遠隔走行システム。
【請求項3】
請求項1又は請求項2に記載の遠隔走行システムにおいて、
前記発進抑制条件は、前記非対象車両のシフトレンジがパーキングレンジに設定されているとの条件、前記非対象車両が電動パーキングブレーキ装置により停車状態に保持されているとの条件、及び、前記非対象車両のブレーキペダルが前記操作者により操作されており且つ前記非対象車両の車速がゼロであるとの条件の少なくとも1つが成立しているときに成立する、
遠隔走行システム。
【請求項4】
操作端末を用いた遠隔操作により車両を走行させる遠隔走行システムにおいて、
同じ操作端末を用いた遠隔操作により走行される2台の車両が前記遠隔操作により走行させられる距離範囲内に存在するときには、これら2台の車両のうち、一方の車両が停車しており且つ動き出さない状態にあるとの発進抑制条件が成立している場合、前記遠隔操作により他方の車両が走行されることを許可するように構成されている遠隔走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔走行システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
車両の利用者が操作端末を用いて遠隔で車両を走行させる遠隔走行システムが知られている(例えば、特許文献1参照)。
【0003】
尚、標準規格であるISO20900(Partially automated parking systems:PAPS)及びISO16787(Assisted parking systems:APS)に、車両の駐車に関わる車両制御が規定されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-114501号公報
【発明の概要】
【0005】
2台の車両が比較的近くに停車されており、これら2台の車両のうち、一方の車両を遠隔操作により走行させる場合、他方の車両が走行可能な状態になっていると、遠隔操作により車両を走行させようとしている操作者が遠隔操作に集中することができない可能性がある。
【0006】
本発明の目的は、操作者に遠隔操作に集中させることができる遠隔走行システムを提供することにある。
【0007】
本発明に係る遠隔走行システムは、操作端末を用いた遠隔操作により車両を走行させるシステムである。そして、本発明に係る遠隔走行システムは、前記遠隔操作を行う操作者が当該遠隔操作により走行させる車両である対象車両とは異なる車両である非対象車両に乗車しているとの乗車条件が成立しているときには、該非対象車両が停車しており且つ動き出さない状態にあるとの発進抑制条件が成立している場合、前記遠隔操作により前記対象車両が走行されることを許可するように構成されている。
【0008】
本発明に係る遠隔走行システムによれば、対象車両を遠隔操作により走行させようとしている操作者が非対象車両に乗車していても、当該非対象車両が動き出さない状態にある。従って、操作者は、対象車両を走行させるための遠隔操作や当該遠隔操作により走行させている対象車両の監視に集中することができる。
【0009】
尚、本発明に係る遠隔走行システムにおいて、前記乗車条件は、前記非対象車両の駆動装置が作動状態にあるとの条件を含んでいてもよい。
【0010】
非対象車両の駆動装置が作動状態にある場合、操作者が対象車両を走行させるための遠隔操作に集中することができない可能性が高まる。本発明に係る遠隔走行システムによれば、非対象車両の駆動装置が作動状態にある場合、当該非対象車両が動き出さない状態にあるときにのみ、遠隔操作による対象車両の走行が許可される。このため、操作者は、対象車両を走行させるための遠隔操作に集中することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ