TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025097729
公報種別
公開特許公報(A)
公開日
2025-07-01
出願番号
2023214083
出願日
2023-12-19
発明の名称
ロボットシステムおよびロボットシステムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250624BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】撮像部によって撮像されるワークの撮像可能範囲を使用者が正確に認識することが可能なロボットシステムを提供する。
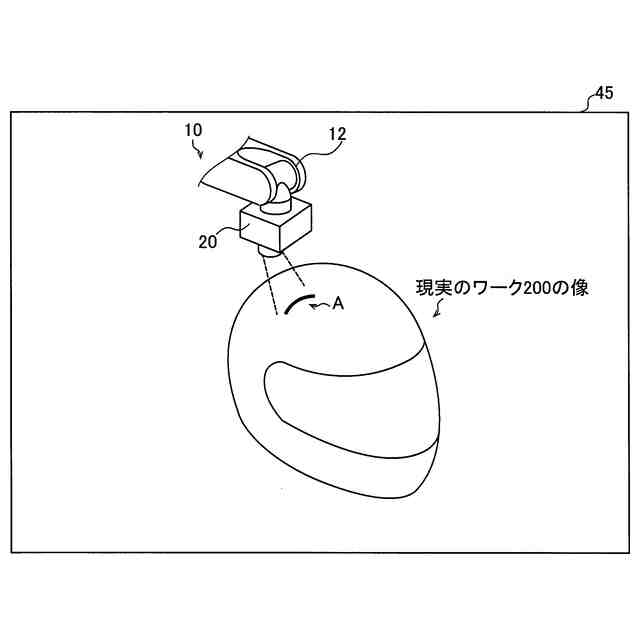
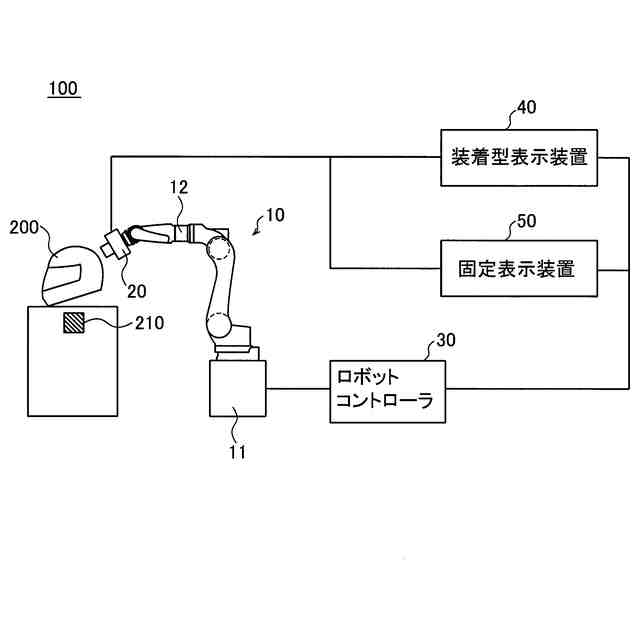
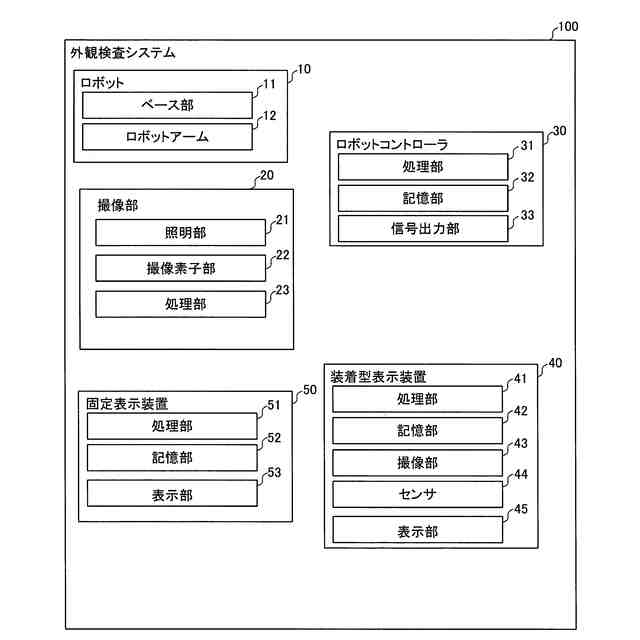
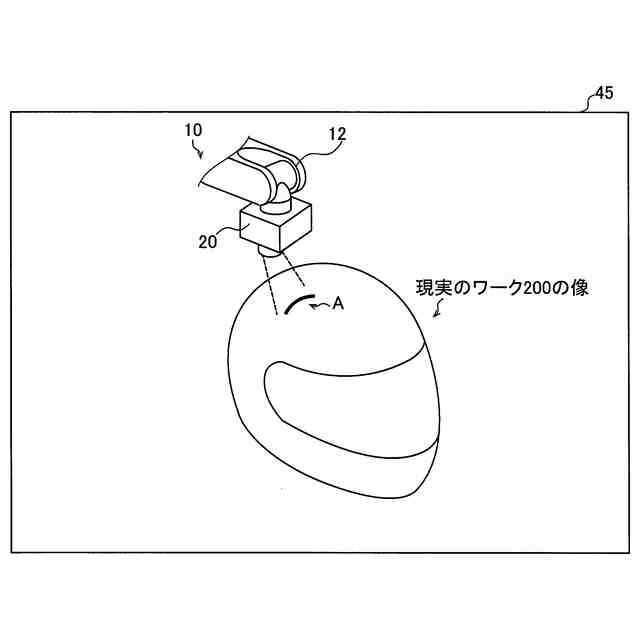
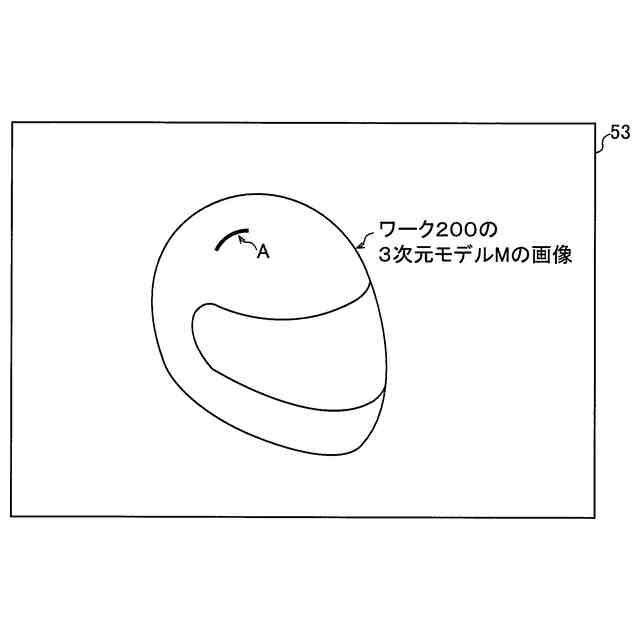
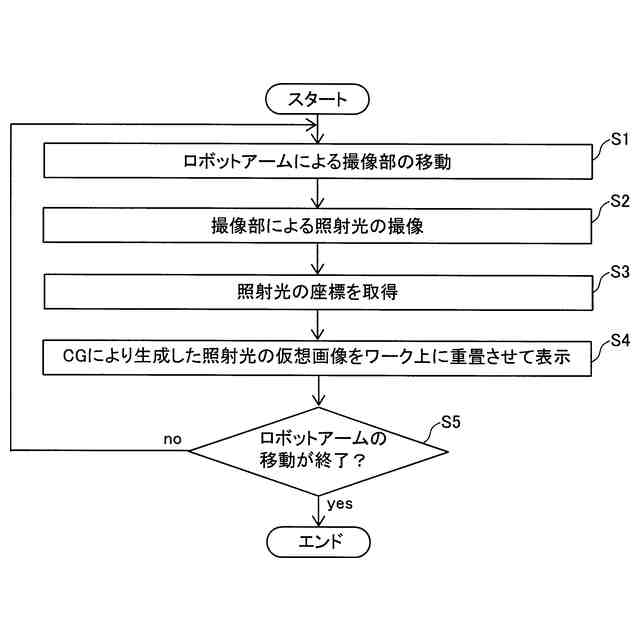
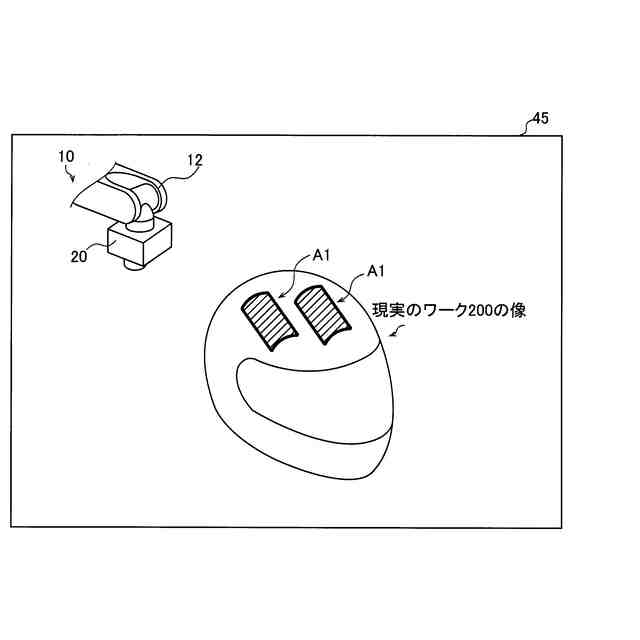
【解決手段】この外観検査システム100は、ロボットアーム12と、ワーク200に照射光を照射する照射部21を含み照射光が照射されたワーク200を撮像する撮像部20と、ワーク200が表示される表示部45および表示部53と、ロボットアーム12により、撮像部20またはワーク200を移動させて、ワーク200に対して相対的に移動される撮像部20に撮像された画像における照射光の座標を取得し、取得した照射光の座標とロボットアーム12の制御点TCPとに基づいて、コンピュータグラフィックにより生成された照射光の仮想画像Aをワーク200の像上に重畳させて表示部45および表示部53に表示させる処理を行う処理部41および処理部51と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
ロボットアームと、
ワークに照射光を照射する照射部を含み照射光が照射された前記ワークを撮像する撮像部と、
前記ワークが表示される表示部と、
前記ロボットアームにより前記撮像部または前記ワークを移動させて、前記ワークに対して相対的に移動される前記撮像部に撮像された画像における照射光の座標を取得し、
取得した照射光の座標と前記ロボットアームの制御点とに基づいて、コンピュータグラフィックにより生成された前記照射光の仮想画像をワークの像上に重畳させて前記表示部に表示させる処理を行う処理部と、を備える、ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記処理部は、
前記ロボットアームにより前記撮像部または前記ワークを移動させ、
前記ワークに対して相対的に移動される前記撮像部に撮像された画像における照射光の座標を順次取得し、
順次取得した照射光の座標に基づいて、ライン状の前記照射光の仮想画像を、順次、前記ワークの像上に重畳させて前記表示部に表示させる処理を行う、請求項1に記載のロボットシステム。
【請求項3】
前記処理部は、
前記ロボットアームにより前記撮像部または前記ワークを移動させ、
前記ワークに対して相対的に移動される前記撮像部に撮像された画像における照射光の座標を順次取得し、
順次取得した複数の照射光の座標に基づいて、帯状の前記照射光の仮想画像を前記ワークの像上に重畳させて前記表示部に表示させる処理を行う、請求項1に記載のロボットシステム。
【請求項4】
前記処理部は、現実のワークの像に重なるように前記照射光の仮想画像を前記表示部に表示させる処理を行う、請求項1に記載のロボットシステム。
【請求項5】
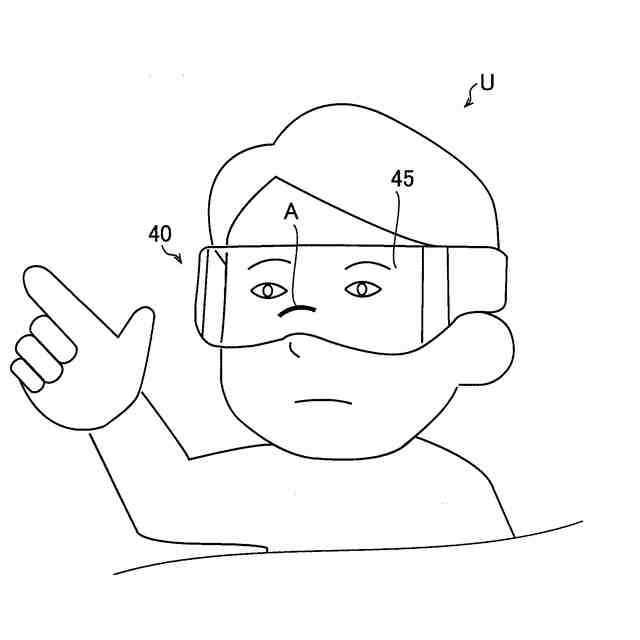
前記表示部は、使用者が視認する現実の像にコンピュータグラフィックにより生成された仮想画像を重ねて表示し、前記使用者に装着される装着型表示装置の表示部を含み、
前記処理部は、前記使用者が視認する現実のワークの像に重なるように前記照射光の仮想画像を前記装着型表示装置の表示部に表示させる処理を行う、請求項4に記載のロボットシステム。
【請求項6】
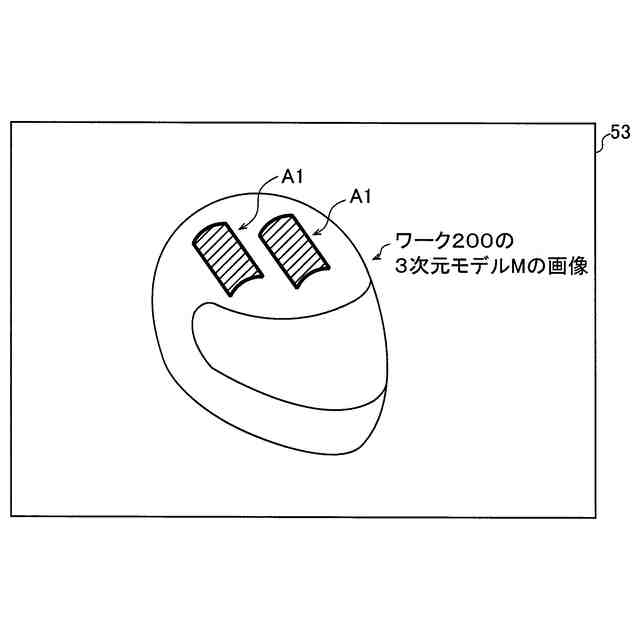
前記表示部は、前記ワークの3次元モデルの画像が表示される固定型表示装置の表示部を含み、
前記処理部は、前記ワークの3次元モデルの画像に重なるように前記照射光の仮想画像を前記固定型表示装置の表示部に表示させる処理を行う、請求項1に記載のロボットシステム。
【請求項7】
ロボットアームにより、ワークに照射光を照射する照射部を含み照射光が照射された前記ワークを撮像する撮像部、または、前記ワークを移動させることと、
前記ワークに対して相対的に移動される前記撮像部に撮像された画像における照射光の座標を取得することと、
取得した照射光の座標と前記ロボットアームの制御点とに基づいて、コンピュータグラフィックにより生成された前記照射光の仮想画像をワークの像上に重畳させて表示部に表示させることと、を備える、ロボットシステムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステムおよびロボットシステムの制御方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、教示装置が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、ビジョンセンサ用のオフライン教示装置が開示されている。このオフライン教示装置は、ワーク、ワークに対して作業を行うロボットおよびワークの計測を行うビジョンセンサの形状および寸法を記憶する記憶装置と、記憶装置に記憶されたデータに基づいて、ワーク、ロボットおよびビジョンセンサの画像を表示するディスプレイとを備える。このオフライン教示装置は、ディスプレイ上で、モデル化された、ワーク、ロボットおよびビジョンセンサを配置してビジョンセンサの教示および調整がオフラインで行われる。具体的には、このオフライン教示装置は、ディスプレイ上でビジョンセンサを配置して、配置したビジョンセンサでワークの計測部位を撮像して、撮像した計測部位のビジョンセンサの画像を生成する。これにより、使用者が、ビジョンセンサにより撮像された計測部位の画像を視認することにより、ビジョンセンサによって撮像されるワークの撮像可能範囲を認識することが可能になる。
【先行技術文献】
【特許文献】
【0004】
特許第4266946号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に記載されたオフライン教示装置では、モデル化された、ワーク、ロボットおよびビジョンセンサに基づいて、ワークの計測部位が撮像されたビジョンセンサの画像を生成している。このため、モデル化された、ワーク、ロボットおよびビジョンセンサに、実物と比べて形状の誤差や位置の誤差などが含まれる場合がある。このため、上記特許文献1に記載されたようなオフライン教示装置では、ビジョンセンサによって撮像されるワークの撮像可能範囲がどの部分であるかが、使用者が正確に認識できない。そこで、撮像部によって撮像されるワークの撮像可能範囲を使用者が正確に認識することが望まれている。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、撮像部によって撮像されるワークの撮像可能範囲を使用者が正確に認識することが可能なロボットシステムおよびロボットシステムの制御方法を提供することである。
【課題を解決するための手段】
【0007】
この開示の第1の局面によるロボットシステムは、ロボットアームと、ワークに照射光を照射する照射部を含み照射光が照射されたワークを撮像する撮像部と、ワークが表示される表示部と、ロボットアームにより撮像部または前記ワークを移動させて、ワークに対して相対的に移動される撮像部に撮像された画像における照射光の座標を取得し、取得した照射光の座標とロボットアームの制御点とに基づいて、コンピュータグラフィックにより生成された照射光の仮想画像をワークの像上に重畳させて表示部に表示させる処理を行う処理部と、を備える。なお、仮想画像をワークの像上に重畳させて表示、とは、仮想画像を現実のワークの像上に重畳させて表示するという意味と、仮想画像をモデル化されたワークの画像上に重畳させて表示するという意味と、を含む概念である。
【0008】
この開示の第1の局面によるロボットシステムでは、上記のように、ロボットアームにより撮像部またはワークを移動させて、ワークに対して相対的に移動される撮像部に撮像された画像における照射光の座標を取得し、取得した照射光の座標とロボットアームの制御点とに基づいて、コンピュータグラフィックにより生成された照射光の仮想画像をワークの像上に重畳させて表示部に表示させる処理を行う処理部を備える。これにより、実際の照射光の座標と、実際のロボットアームの制御点とに基づいて、ワークの像上に照射光の仮想画像が表示される。すなわち、形状や位置が実際の情報に基づくので、形状や位置の誤差が小さい。このため、使用者がワークの像上の照射光の仮想画像を視認することにより、照射光がワークに対してどのように当たったのかを確認することができるので、撮像部によって撮像されるワークの撮像可能範囲を正確に認識できる。
【0009】
この開示の第2の局面によるロボットシステムの制御方法は、ロボットアームにより、ワークに照射光を照射する照射部を含み照射光が照射されたワークを撮像する撮像部、または、ワークを移動させることと、ワークに対して相対的に移動される撮像部に撮像された画像における照射光の座標を取得することと、取得した照射光の座標とロボットアームの制御点とに基づいて、コンピュータグラフィックにより生成された照射光の仮想画像をワークの像上に重畳させて表示部に表示させることと、を備える。なお、仮想画像をワークの像上に重畳させて表示、とは、仮想画像を現実のワークの像上に重畳させて表示するという意味と、仮想画像をモデル化されたワークの像上に重畳させて表示するという意味と、を含む概念である。
【0010】
この開示の第2の局面によるロボットシステムの制御方法では、上記のように、ワークに対して相対的に移動される撮像部に撮像された画像における照射光の座標を取得することと、取得した照射光の座標とロボットアームの制御点とに基づいて、コンピュータグラフィックにより生成された照射光の仮想画像をワークの像上に重畳させて表示部に表示させることと、を備える。これにより、実際の照射光の座標と、実際のロボットアームの制御点とに基づいて、ワークの像上に照射光の仮想画像が表示される。すなわち、形状や位置が実際の情報に基づくので、形状や位置の誤差が小さい。このため、使用者がワークの像上の照射光の仮想画像を視認することにより、照射光がワークに対してどのように当たったのかを確認することができるので、撮像部によって撮像されるワークの撮像可能範囲を正確に認識することが可能なロボットシステムの制御方法を提供できる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ