TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099685
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216540
出願日
2023-12-22
発明の名称
情報処理装置、ロボット、情報処理方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
A63H
11/00 20060101AFI20250626BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】簡素な構成のロボットを用いてロボットに対する外部からの作用の有無を予測する。
【解決手段】情報処理装置は、ロボットが有するユーザからの少なくとも一つの作用を検出するためのセンサの或る時点における検出結果と、或る時点を含む所定期間内にロボットが外部から受けた所定の作用の有無と、が対応付けられた対応情報を記憶部に記憶させ、記憶部に記憶された相異なる複数の時点に対応する複数の対応情報に基づいて、複数の時点後の特定の時点においてロボットがユーザから受ける作用を予測する、処理部を備える。
【選択図】図13
特許請求の範囲
【請求項1】
ロボットが有するユーザからの少なくとも一つの作用を検出するためのセンサの或る時点における検出結果と、前記或る時点を含む所定期間内に前記ロボットが外部から受けた所定の作用の有無と、が対応付けられた対応情報を記憶部に記憶させ、
前記記憶部に記憶された相異なる複数の時点に対応する複数の前記対応情報に基づいて、前記複数の時点後の特定の時点において前記ロボットが前記ユーザから受ける作用を予測する、
処理部を備える情報処理装置。
続きを表示(約 1,200 文字)
【請求項2】
前記処理部は、前記複数の対応情報と、前記特定の時点における前記センサによる検出結果と、に基づいて、前記ロボットが前記ユーザから受ける作用を予測する、
請求項1に記載の情報処理装置。
【請求項3】
前記処理部は、
前記センサによる検出結果に基づいて、前記ロボットが前記外部から受けた前記作用の有無を判別し、
前記ロボットが前記作用を受けたと判別した場合に、前記作用を受けたことを表す情報と、前記作用を受けた時点を含む前記所定期間内の前記或る時点における前記センサによる検出結果と、が対応付けられた前記対応情報を前記記憶部に記憶させる、
請求項1に記載の情報処理装置。
【請求項4】
前記処理部は、前記複数の時点に対応する前記複数の対応情報に基づいて、前記特定の時点において前記ロボットが前記ユーザから前記作用を受ける確率を予測する、
請求項1に記載の情報処理装置。
【請求項5】
前記処理部は、導出した前記確率が所定の閾値以上である場合に、前記ロボットに所定の動作を行わせる、
請求項4に記載の情報処理装置。
【請求項6】
前記処理部は、
前記動作を開始させた時点に対応する前記或る時点における前記センサによる検出結果と、前記所定期間のうち前記動作を開始させてから所定時間内に前記ロボットが前記外部から受けた前記作用の有無と、が対応付けられた前記対応情報を前記記憶部に記憶させる、
請求項5に記載の情報処理装置。
【請求項7】
前記処理部は、前記動作を開始させてから前記所定時間内に前記ロボットが前記外部から受けた前記作用の有無に基づいて前記動作の評価値を導出し、
導出した前記評価値に基づいて、前記ロボットに行わせる前記動作の内容を調整する、
請求項6に記載の情報処理装置。
【請求項8】
前記処理部は、
前記複数の対応情報に基づいてロジスティック回帰分析を行うことで、前記ロボットが前記作用を受ける確率を、前記センサによる複数の前記検出結果を説明変数として表す回帰式を導出し、
前記特定の時点における前記センサによる前記複数の検出結果と、導出した前記回帰式と、に基づいて前記確率を導出する、
請求項4に記載の情報処理装置。
【請求項9】
前記処理部は、
前記記憶部に所定の下限数以上の前記対応情報が記憶された場合に前記回帰式を導出し、
前記回帰式の導出後に前記対応情報を前記記憶部に記憶させる毎に、最新の前記対応情報を含む複数の対応情報に基づいて前記回帰式を更新する、
請求項8に記載の情報処理装置。
【請求項10】
請求項1~9のいずれか一項に記載の情報処理装置と、
前記センサと、
を備えるロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、ロボット、情報処理方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、ロボットにカメラを搭載し、当該カメラにより周囲を撮影した画像に基づいて、ユーザの位置等の周囲の状況に応じた動作をロボットに行わせる技術がある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/151387号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ロボットに上記の従来技術を適用すると、カメラ及び画像処理回路等により構成が複雑化する。また、カメラによる撮影画像は、ロボットの周囲の状況を一面的に切り取ったものに過ぎないので、外部からの作用の有無を正確に予測することは困難であるという課題がある。
【0005】
本発明は、簡素な構成のロボットを用いてロボットに対する外部からの作用の有無を予測することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係る情報処理装置は、
ロボットが有するユーザからの少なくとも一つの作用を検出するためのセンサの或る時点における検出結果と、前記或る時点を含む所定期間内に前記ロボットが外部から受けた所定の作用の有無と、が対応付けられた対応情報を記憶部に記憶させ、
前記記憶部に記憶された相異なる複数の時点に対応する複数の前記対応情報に基づいて、前記複数の時点後の特定の時点において前記ロボットが前記ユーザから受ける作用を予測する、
処理部を備える。
【発明の効果】
【0007】
本発明によれば、簡素な構成のロボットを用いてロボットに対する外部からの作用の有無を予測することができる。
【図面の簡単な説明】
【0008】
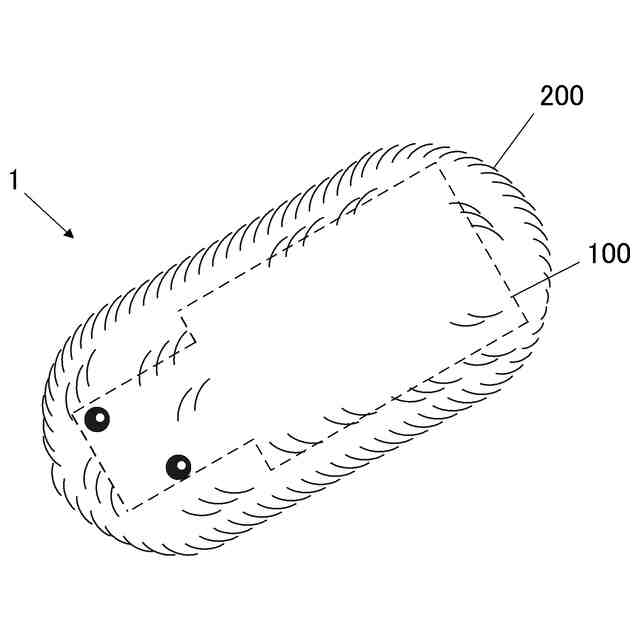
ロボットの外観を示す図である。
ロボットの本体の構成を示す模式図である。
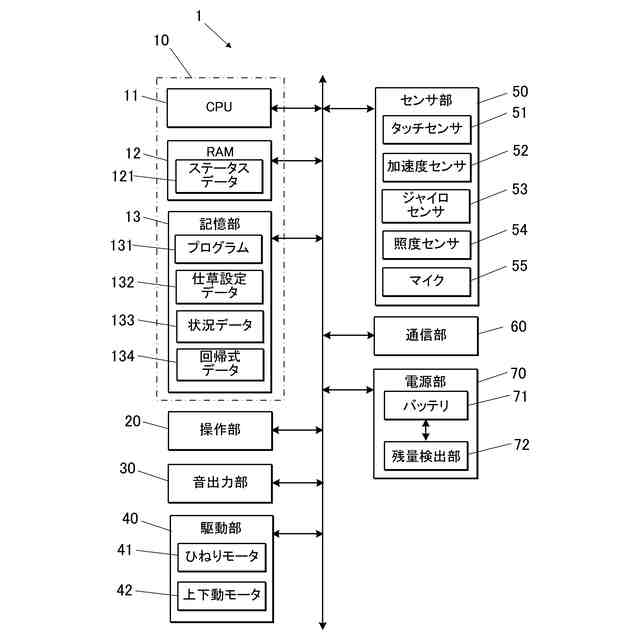
ロボットの機能構成を示すブロック図である。
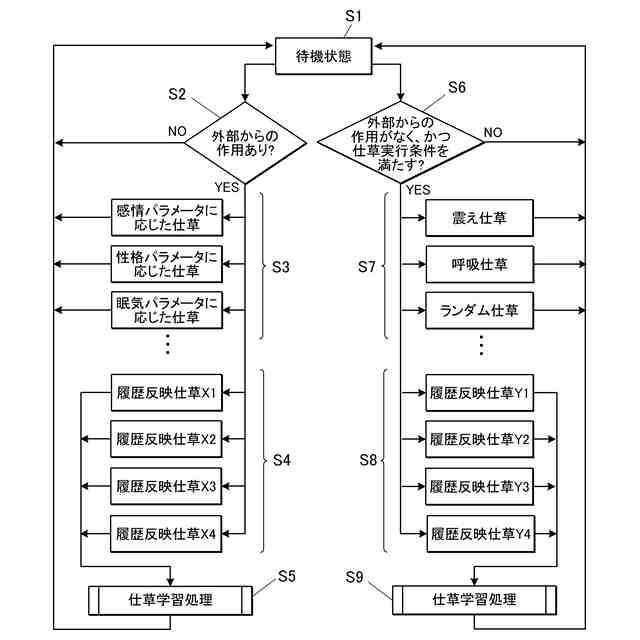
ロボットの動作状態の遷移を概略的に示す図である。
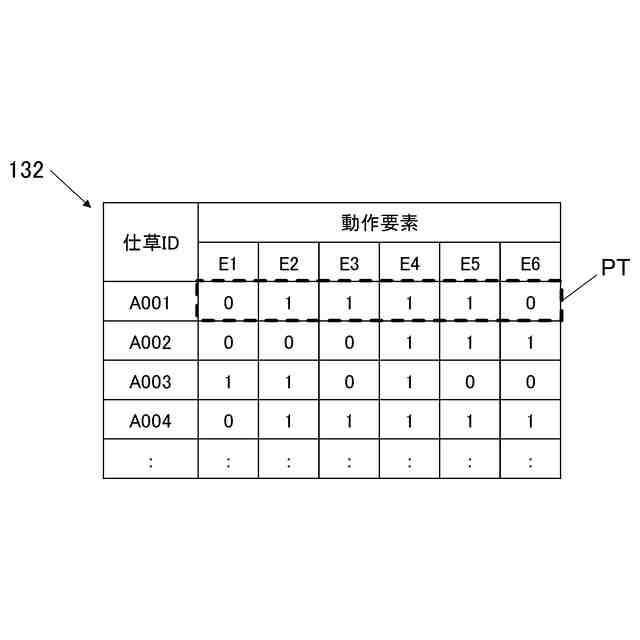
仕草設定データの内容を示す図である。
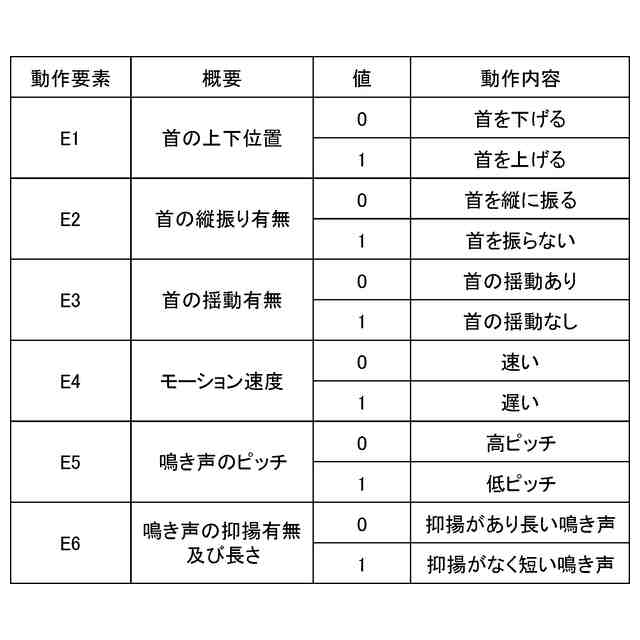
動作要素の内容を示す図である。
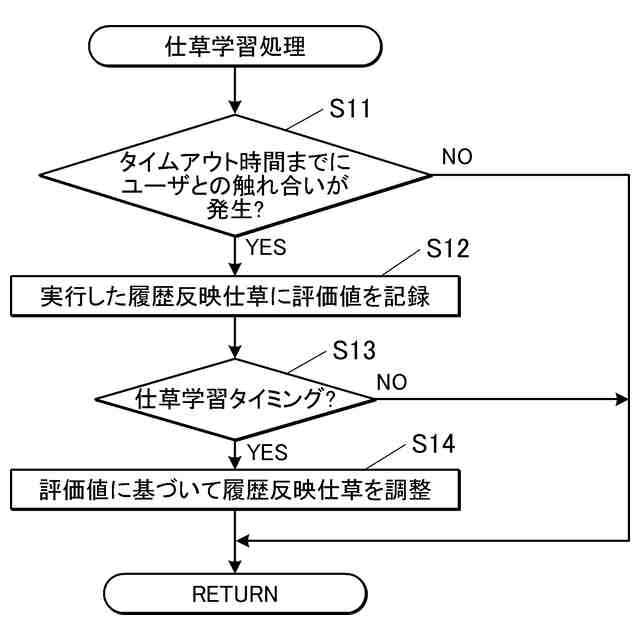
仕草学習処理の制御手順を示すフローチャートである。
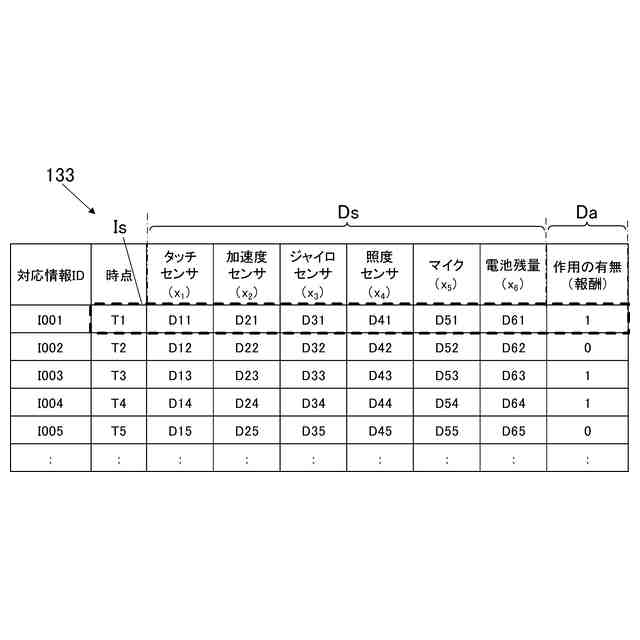
状況データの内容を示す図である。
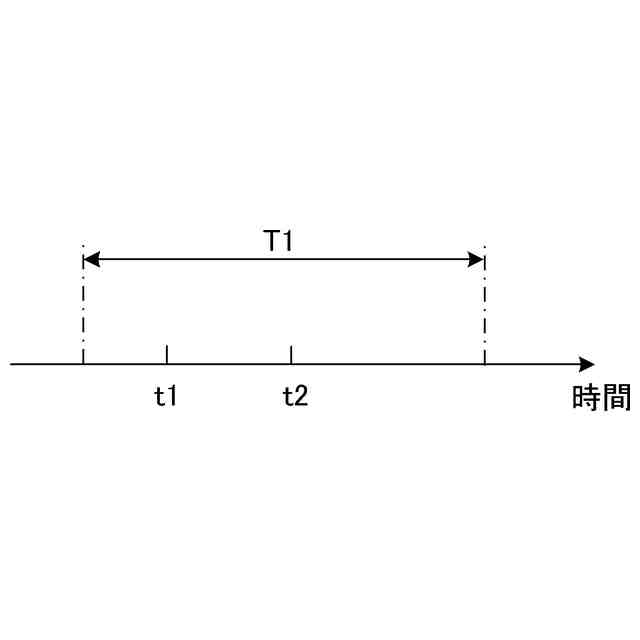
作用を受けたタイミングとセンサデータの生成タイミングとの関係の例を示す図である。
仕草に応じて作用を受けたタイミングとセンサデータの生成タイミングとの関係の例を示す図である。
ロボット制御処理の制御手順を示すフローチャートである。
状況記録処理の制御手順を示すフローチャートである。
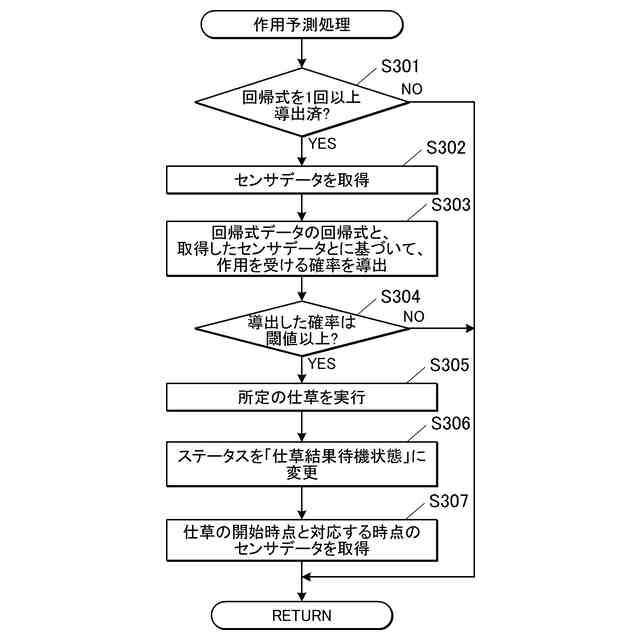
作用予測処理の制御手順を示すフローチャートである。
仕草結果待機処理の制御手順を示すフローチャートである。
回帰式学習処理の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づいて説明する。
【0010】
図1は、ロボット1の外観を示す図である。ロボット1は、本体100と、本体100を覆う外装200と、を備える。ロボット1は、小型の生き物を模したペットロボットである。ロボット1は、互いに異なる複数の仕草(動作)を行うことができる。仕草には、首を動かす仕草や、鳴き声を発する仕草等がある。外装200は、本体100の動きに追従して変形する。外装200は、パイル織物により形成された毛皮や、目を模した装飾部材等を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ