TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101451
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218304
出願日
2023-12-25
発明の名称
搬送システム、細胞培養システム、及び搬送方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
C12M
1/00 20060101AFI20250630BHJP(生化学;ビール;酒精;ぶどう酒;酢;微生物学;酵素学;突然変異または遺伝子工学)
要約
【課題】持ち上げる直前のトレイの位置が定まっていない場合であっても、トレイを安定して持ち上げて移動させる。
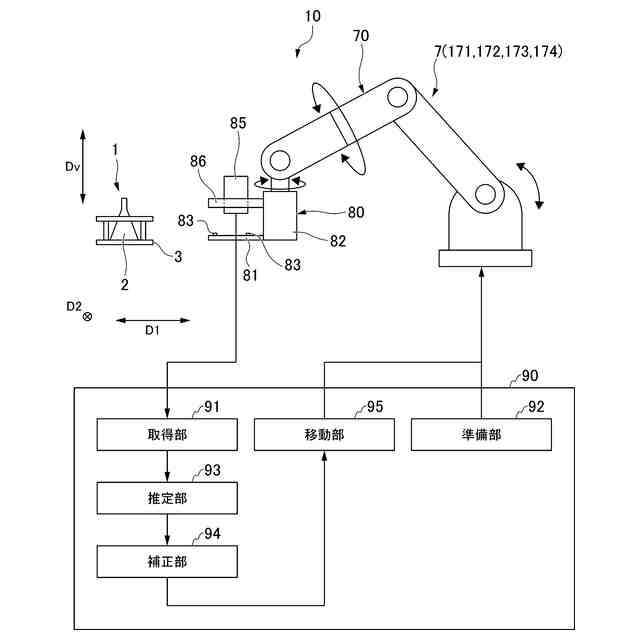
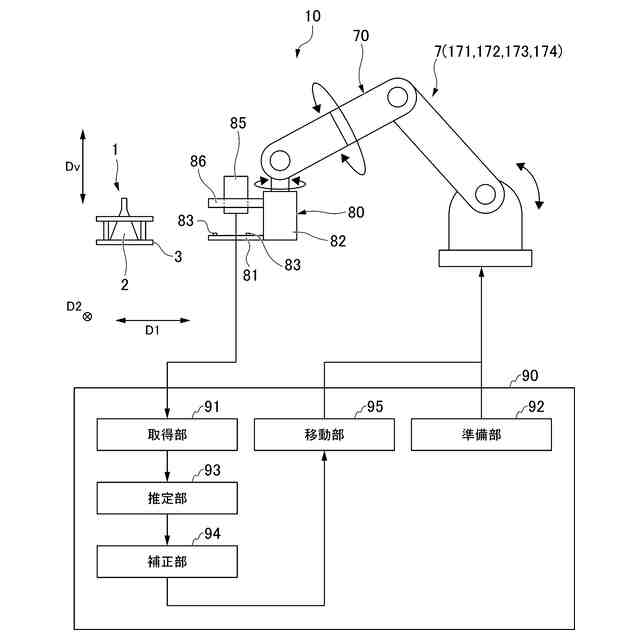
【解決手段】搬送システムは、細胞培養に使用される容器が載置可能なトレイを鉛直方向の下方から持ち上げ状態で支持可能な支持機構をエンドエフェクタとして取り付けられたロボットアームと、前記ロボットアームを制御する制御装置とを備える。制御装置は、前記トレイを撮影部で撮影し、前記トレイ上の予め定めた特徴点を含む前記トレイの画像を取得する取得部と、前記取得した画像から、前記特徴点と予め定めた基準位置とのずれ量を推定する推定部と、前記ずれ量を低減させるように、前記支持機構の位置を補正する補正部と、前記支持機構の位置を補正された位置に移動し、移動後に前記支持機構で前記トレイを持ち上げる移動部とを備える。
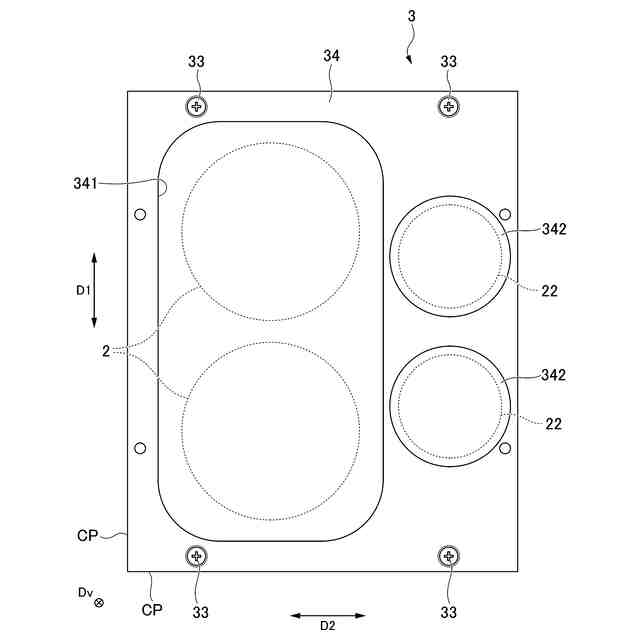
【選択図】図2
特許請求の範囲
【請求項1】
細胞培養に使用される容器が載置可能なトレイを鉛直方向の下方から持ち上げ状態で支持可能な支持機構を取り付けられたロボットアームと、
前記ロボットアームを制御する制御装置とを備え、
前記支持機構は、
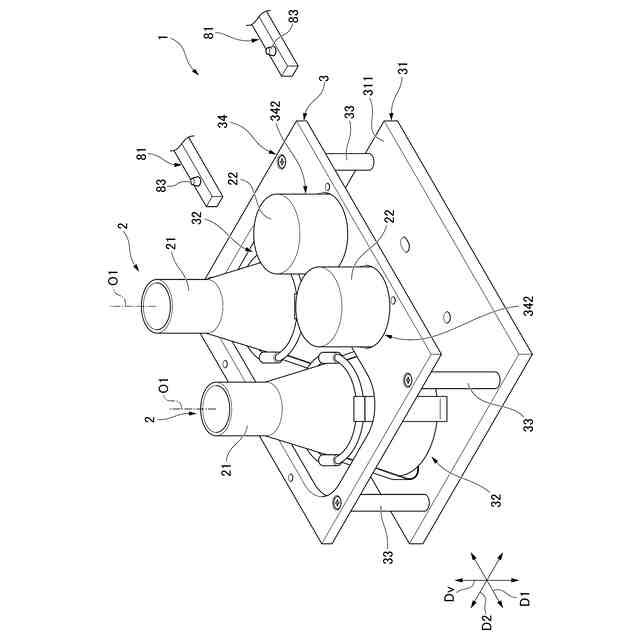
前記鉛直方向に対して直交する第一方向に真っすぐ延びて前記トレイを前記鉛直方向の下方から支持可能な支持面を有し、前記第一方向に対して直交する第二方向に互いに離れて配置された一対の支持部と、
一対の前記支持部に接続されて、一対の前記支持部の姿勢を変化させる駆動部と、
一対の前記支持部に対して前記鉛直方向の上方に配置され、前記トレイを撮影可能な撮影部と、を備え、
前記制御装置は、
前記トレイを前記撮影部で撮影し、前記トレイ上の予め定めた特徴点を含む前記トレイの画像を取得する取得部と、
前記取得した画像から、前記特徴点と予め定めた基準位置とのずれ量を推定する推定部と、
前記ずれ量を低減させるように、前記支持機構の位置を補正する補正部と、
前記支持機構の位置を補正された位置に移動させ、移動後に前記支持機構で前記トレイを持ち上げる移動部とを備える搬送システム。
続きを表示(約 1,200 文字)
【請求項2】
前記支持機構は、一対の前記支持部に対して前記鉛直方向の上方に配置され、前記トレイに光を照射可能な照明部をさらに備え、
前記トレイは、暗所内に配置され、
前記取得部は、前記トレイを前記照明部で照らすとともに、前記撮影部で撮影し、前記特徴点として、前記トレイの縁を含む前記トレイの画像を前記暗所内で取得する請求項1に記載の搬送システム。
【請求項3】
前記制御装置は、前記撮影部による画角内に前記特徴点が含まれるように前記支持機構を前記トレイ上に移動させて撮影前の準備を行う準備部をさらに含み、
前記取得部は、前記支持機構が前記トレイ上に移動された後に前記画像を取得する請求項1又は2に記載の搬送システム。
【請求項4】
前記準備部は、並んで配置された複数の前記トレイの中の一つの前記トレイに対して前記鉛直方向の上方に前記支持機構を移動させ、
前記取得部は、一つの前記トレイのみから前記画像を取得する請求項3に記載の搬送システム。
【請求項5】
前記準備部は、前記取得部で前記画像が取得された後に、前記取得部で前記画像を取得した一つの前記トレイに対して隣接する別のトレイに対して前記鉛直方向の上方に前記支持機構を移動させる請求項4に記載の搬送システム。
【請求項6】
請求項1又は2に記載の搬送システムと、
前記搬送システムで搬送された前記容器に対して培養操作を行う培養エリアを形成するインキュベータと、を備え、
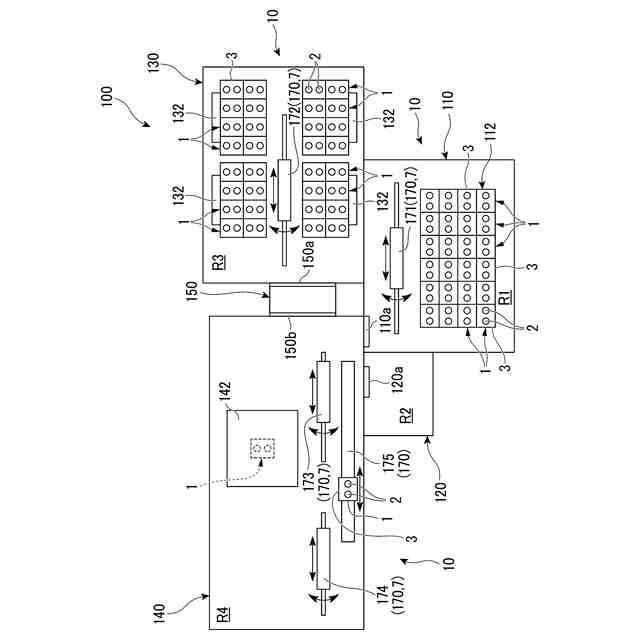
前記インキュベータは、前記培養エリアの暗所内に配置され、前記鉛直方向の延びる鉛直軸線を中心として、並んで配置された複数の前記トレイを同時に攪拌させる振盪装置を有する細胞培養システム。
【請求項7】
細胞培養に使用される容器が載置可能なトレイを鉛直方向の下方から持ち上げ状態で支持可能な支持機構を取り付けられたロボットアームによって前記トレイを移動させる搬送方法であって、
前記支持機構は、
前記鉛直方向に対して直交する第一方向に真っすぐ延びて前記トレイを前記鉛直方向の下方から支持可能な支持面を有し、前記第一方向に対して直交する第二方向に互いに離れて配置された一対の支持部と、
一対の前記支持部に接続されて、一対の前記支持部の姿勢を変化させる駆動部と、
一対の前記支持部に対して前記鉛直方向の上方に配置され、前記トレイを撮影可能な撮影部と、を備え、
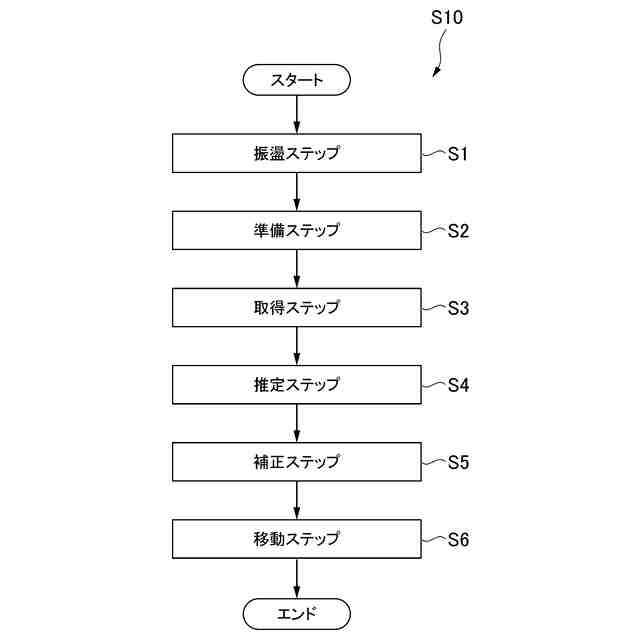
前記トレイを前記撮影部で撮影し、前記トレイ上の予め定めた特徴点を含む前記トレイの画像が取得されるステップと、
前記取得した画像から、前記特徴点と予め定めた基準位置とのずれ量が推定されるステップと、
前記ずれ量を低減させるように、前記支持機構の位置が補正されるステップと、
前記支持機構の位置を補正された位置に移動し、移動後に前記支持機構で前記トレイが持ち上げられるステップと、を含む搬送方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送システム、細胞培養システム、及び搬送方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、最小限の人的関与を伴う培養システムにおける細胞培養インキュベータが記載されている。特許文献1に記載の細胞培養インキュベータは、貯蔵場所と前記少なくともイメージャとの間で1つ以上の細胞培養容器を移動させる自動化された移動デバイスをコントローラで制御することで、細胞培養容器を希望する位置へ移動させることが可能とされている。
【先行技術文献】
【特許文献】
【0003】
特許6851635号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
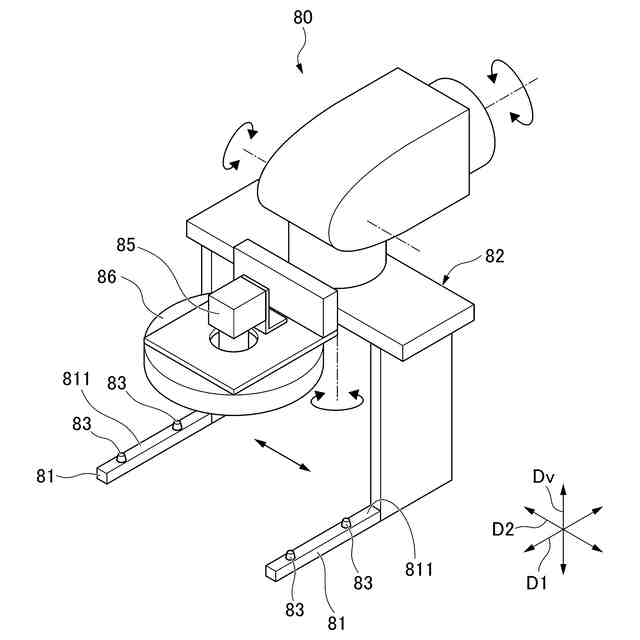
ところで、細胞培養を行う際には、フラスコ等の容器を何度も振盪させる必要がある。このような振盪作業は、専用の振盪装置にフラスコを載せたトレイを載せて、鉛直軸周りに回転させるように、実施される。
【0005】
しかしながら、振盪装置でトレイを回転させると、振盪作業の開始前と、終了後とで、トレイの位置が微妙にずれてしまう。さらに、振盪装置では、開始前のトレイの位置と終了後のトレイの位置を完全に一致させるように制御することは非常に難しい。その結果、振盪装置に対して自動的にトレイを移動させる際には、トレイを安定して持ち上げることが難しい。そのため、振盪装置で載置されたトレイのように、持ち上げる直前のトレイの位置が定まっていない場合であっても、トレイを安定して持ち上げて移動させることが望まれている。
【0006】
本開示は、上記課題を解決するためになされたものであって、持ち上げる直前のトレイの位置が定まっていない場合であっても、トレイを安定して持ち上げて移動させること可能な搬送システム、細胞培養システム、及び搬送方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本開示に係る搬送システムは、細胞培養に使用される容器が載置可能なトレイを鉛直方向の下方から持ち上げ状態で支持可能な支持機構を取り付けられたロボットアームと、前記ロボットアームを制御する制御装置とを備え、前記支持機構は、前記鉛直方向に対して直交する第一方向に真っすぐ延びて前記トレイを前記鉛直方向の下方から支持可能な支持面を有し、前記第一方向に対して直交する第二方向に互いに離れて配置された一対の支持部と、一対の前記支持部に接続されて、一対の前記支持部の姿勢を変化させる駆動部と、一対の前記支持部に対して前記鉛直方向の上方に配置され、前記トレイを撮影可能な撮影部と、を備え、前記制御装置は、前記トレイを前記撮影部で撮影し、前記トレイ上の予め定めた特徴点を含む前記トレイの画像を取得する取得部と、前記取得した画像から、前記特徴点と予め定めた基準位置とのずれ量を推定する推定部と、前記ずれ量を低減させるように、前記支持機構の位置を補正する補正部と、前記支持機構の位置を補正された位置に移動させ、移動後に前記支持機構で前記トレイを持ち上げる移動部とを備える。
【0008】
また、本開示に係る細胞培養システムは、上記搬送システムと、前記搬送システムで搬送された前記容器に対して培養操作を行う培養エリアを形成するインキュベータと、を備え、前記インキュベータは、前記培養エリアの暗所内に配置され、前記鉛直方向の延びる鉛直軸線を中心として、並んで配置された複数の前記トレイを同時に攪拌させる振盪装置を有する。
【0009】
また、本開示に係る搬送方法は、細胞培養に使用される容器が載置可能なトレイを鉛直方向の下方から持ち上げ状態で支持可能な支持機構を取り付けられたロボットアームによって前記トレイを移動させる搬送方法であって、前記支持機構は、前記鉛直方向に対して直交する第一方向に真っすぐ延びて前記トレイを前記鉛直方向の下方から支持可能な支持面を有し、前記第一方向に対して直交する第二方向に互いに離れて配置された一対の支持部と、一対の前記支持部に接続されて、一対の前記支持部の姿勢を変化させる駆動部と、一対の前記支持部に対して前記鉛直方向の上方に配置され、前記トレイを撮影可能な撮影部と、を備え、前記トレイを前記撮影部で撮影し、前記トレイ上の予め定めた特徴点を含む前記トレイの画像が取得されるステップと、前記取得した画像から、前記特徴点と予め定めた基準位置とのずれ量が推定されるステップと、前記ずれ量を低減させるように、前記支持機構の位置が補正されるステップと、前記支持機構の位置を補正された位置に移動し、移動後に前記支持機構で前記トレイが持ち上げられるステップと、を含む。
【発明の効果】
【0010】
本開示の搬送システム、細胞培養システム、及び搬送方法によれば、持ち上げる直前のトレイの位置が定まっていない場合であっても、トレイを安定して持ち上げて移動させることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ