TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102608
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2024075423
出願日
2024-05-07
発明の名称
制御装置
出願人
AMATAMA株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20250701BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】汎用性を高めることが可能な制御装置を提供する。
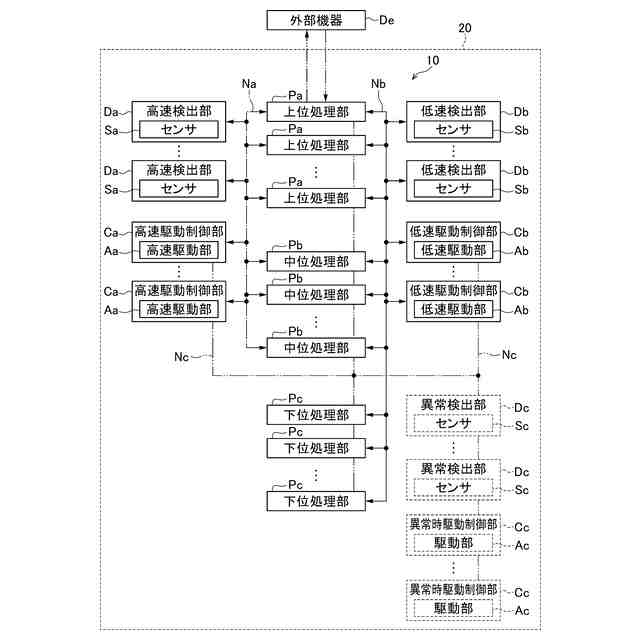
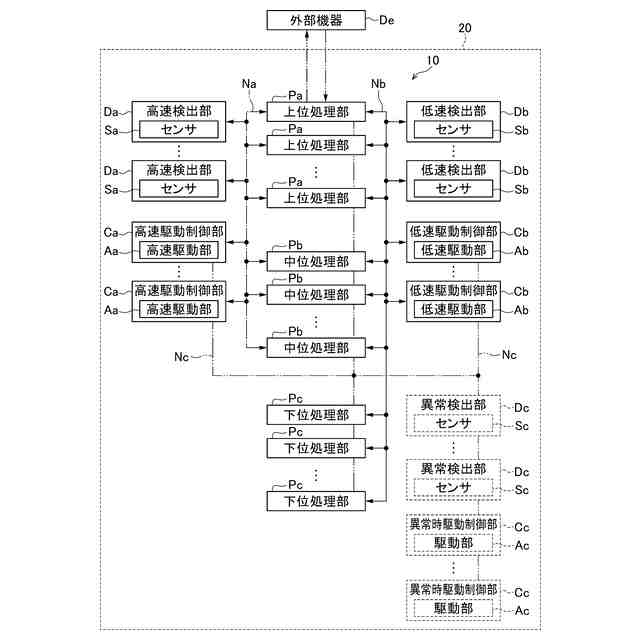
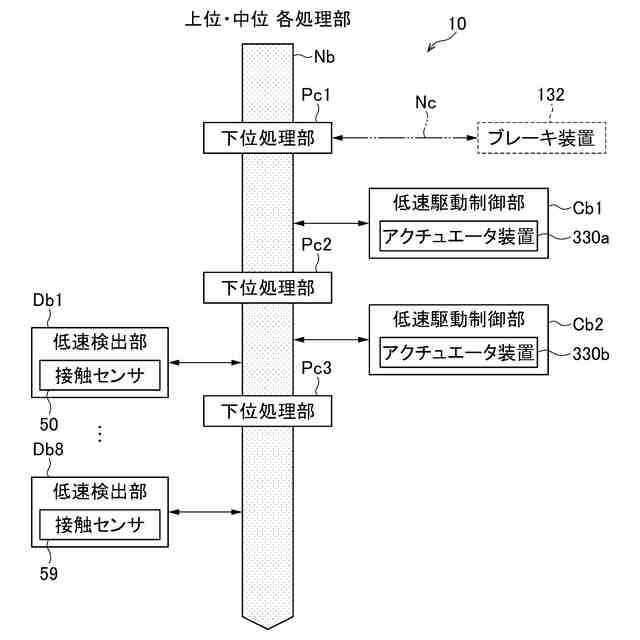
【解決手段】制御装置10は、駆動部Aa,Abが設けられる機械装置を制御する。制御装置10は、検出部Da,Dbと、処理部Pa,Pb,Pcと、駆動制御部Ca,Cbと、を備える。検出部Da,Dbは、センサSa,Sbから出力される検出信号を感覚情報に変換して、変換された感覚情報を通信ネットワークNa,Nbに伝送する。処理部Pa,Pb,Pcは、通信ネットワークNa,Nbに伝送される感覚情報を分析して、行動指令情報を生成するとともに、生成された行動指令情報を通信ネットワークNa,Nbに伝送する。駆動制御部Ca,Cbは、通信ネットワークNa,Nbに伝送される行動指令情報を分析するとともに、分析された行動指令情報に基づいて駆動部Aa,Abを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
複数の駆動部が設けられる機械装置を制御する制御装置であって、
前記機械装置に設けられる検出部用センサが所定の情報を検出することで前記検出部用センサから出力される検出信号を感覚情報に変換して、変換された前記感覚情報を伝送路に伝送する検出部と、
前記検出部から前記伝送路に伝送される前記感覚情報を分析するとともに、前記感覚情報の分析結果に基づいて、前記機械装置が行うべき行動の情報である行動指令情報を生成するとともに、生成された前記行動指令情報を前記伝送路に伝送する処理部と、
前記処理部から前記伝送路に伝送される前記行動指令情報を分析するとともに、分析された前記行動指令情報に基づいて前記駆動部を制御する駆動制御部と、を備える
制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記検出部は、
前記検出部用センサと、
前記検出部用センサの検出信号に基づいて、前記検出部用センサにより検出された前記所定の情報を認識する検出部用認識部と、
前記検出部用認識部により認識された前記所定の情報を用いて前記感覚情報を生成する検出部用生成部と、
前記検出部用生成部により生成された前記感覚情報を抽象化する検出部用抽象化部と、
前記検出部用抽象化部により抽象化された前記感覚情報を前記伝送路に伝送する検出部用通信部と、を備える
請求項1に記載の制御装置。
【請求項3】
前記検出部は、前記検出部用センサの検出信号と、前記検出部用センサにより検出された前記所定の情報との関係を学習する検出部用学習部を更に備え、
前記検出部用生成部は、前記検出部用学習部の学習情報を更に用いて前記感覚情報を生成する
請求項2に記載の制御装置。
【請求項4】
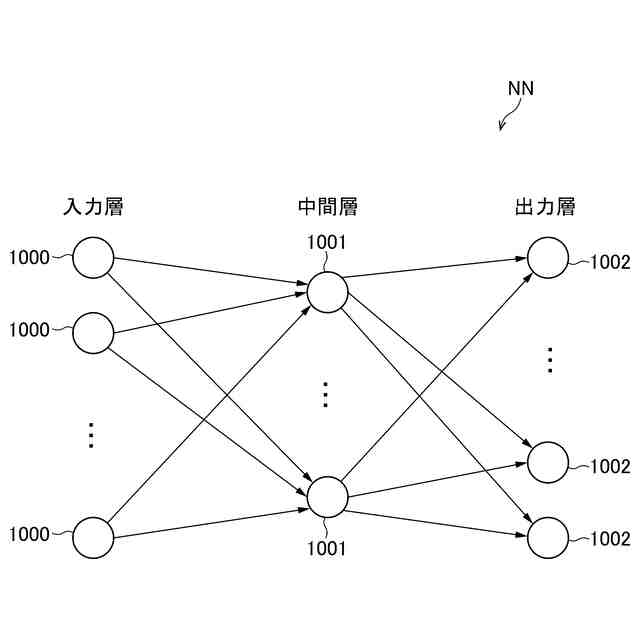
前記検出部用認識部、前記検出部用抽象化部、及び前記検出部用学習部は、ニューラルネットワークにより構成されている
請求項3に記載の制御装置。
【請求項5】
前記処理部は、
前記伝送路から前記感覚情報を受信する処理部用通信部と、
前記処理部用通信部により受信される前記感覚情報を分析する処理部用分析部と、
前記処理部用分析部による前記感覚情報の分析結果に基づいて、前記機械装置の行動を計画する行動計画部と、
前記処理部用分析部による前記感覚情報の分析結果に基づいて、前記機械装置の現在の状況を認識する自己認識部と、
前記行動計画部により計画された前記機械装置の行動計画と、前記自己認識部により認識された前記機械装置の現在の状況とを用いて前記行動指令情報を生成する処理部用生成部と、
前記処理部用生成部により生成された前記行動指令情報を抽象化する処理部用抽象化部と、を備え、
前記処理部用通信部は、前記処理部用抽象化部により抽象化された前記行動指令情報を前記伝送路に伝送する
請求項1に記載の制御装置。
【請求項6】
前記処理部は、
外部機器から送信される外部入力情報を受信する外部通信部と、
前記外部通信部により受信された前記外部入力情報を認識する処理部用認識部と、を更に備え、
前記処理部用生成部は、前記処理部用認識部により認識された前記外部入力情報を更に用いて前記行動指令情報を生成する
請求項5に記載の制御装置。
【請求項7】
前記処理部は、前記外部入力情報と前記行動指令情報との関係を学習する処理部用学習部を更に備え、
前記処理部用生成部は、前記処理部用学習部の学習情報を更に用いて前記行動指令情報を生成する
請求項6に記載の制御装置。
【請求項8】
前記処理部用認識部、前記処理部用抽象化部、及び前記処理部用学習部は、ニューラルネットワークにより構成されている
請求項7に記載の制御装置。
【請求項9】
前記駆動制御部は、
前記伝送路から前記行動指令情報を受信する駆動部用通信部と、
前記行動指令情報を分析する駆動部用分析部と、
前記駆動部用分析部による前記行動指令情報の分析結果に基づいて、前記駆動部を制御する制御部と、を備える
請求項1に記載の制御装置。
【請求項10】
前記駆動制御部は、
前記駆動部の動作状態、及び前記駆動部により動かされる被対象物の動作状態の少なくとも一方を検出する駆動部用センサと、
前記駆動部用センサの検出信号に基づいて、前記駆動部用センサにより検出された前記駆動部の動作及び前記被対象物の動作の少なくとも一方を認識する駆動部用認識部と、
前記駆動部用認識部により認識された前記駆動部の動作及び被対象物の動作の少なくとも一方を用いて動作結果情報を生成する駆動部用生成部と、
前記駆動部用生成部により生成された前記動作結果情報を抽象化する駆動部用抽象化部と、を更に備え、
前記駆動部用通信部は、前記駆動部用抽象化部により抽象化された前記動作結果情報を前記伝送路に伝送する
請求項9に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、下記の特許文献1に記載のロボットがある。このロボットは、触覚検知部と、生成部と、記憶部と、分析部と、制御部とを備えている。触覚検知部は外部からの接触を検知する。生成部は検知結果に基づいて接触情報を生成する。記憶部は、接触情報を所定期間だけ累積して記憶する。分析部は、累積した接触情報に基づいてユーザごとの傾向を分析する。制御部は、ロボットにアクションさせるための機構を制御し、分析結果に基づいてアクションを動的に変化させる。
【先行技術文献】
【特許文献】
【0003】
特開2017-119336号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の制御装置では、汎用性の面で改善の余地がある。
【0005】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、汎用性を高めることが可能な制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決する制御装置は、複数の駆動部が設けられる機械装置を制御する制御装置であって、検出部と、処理部と、駆動制御部と、を備える。検出部は、機械装置に設けられる検出部用センサが所定の情報を検出することで検出部用センサから出力される検出信号を感覚情報に変換して、変換された感覚情報を伝送路に伝送する。処理部は、検出部から伝送路に伝送される感覚情報を分析するとともに、感覚情報の分析結果に基づいて、機械装置が行うべき行動の情報である行動指令情報を生成するとともに、生成された行動指令情報を伝送路に伝送する。駆動制御部は、処理部から伝送路に伝送される行動指令情報を分析するとともに、分析された行動指令情報に基づいて駆動部を制御する。
【0007】
この構成によれば、検出部、処理部、及び駆動制御部が、感覚情報及び行動指令情報に基づいて動作するようになるため、従来の制御装置のような数値信号や複雑な制御信号で動作する装置と比較すると、より汎用性を高めることが可能となる。
【発明の効果】
【0008】
本発明の制御装置によれば、汎用性を高めることが可能である。
【図面の簡単な説明】
【0009】
第1実施形態の制御装置の概略構成を示すブロック図。
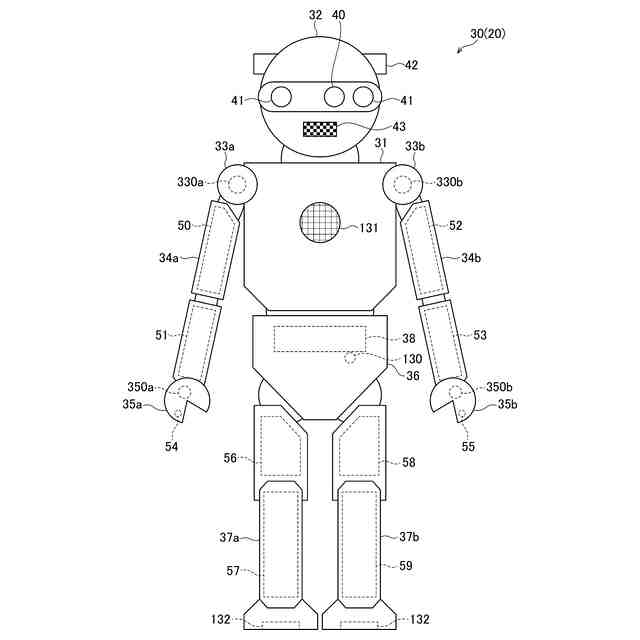
第1実施形態のロボット装置の構成を模式的に示す図。
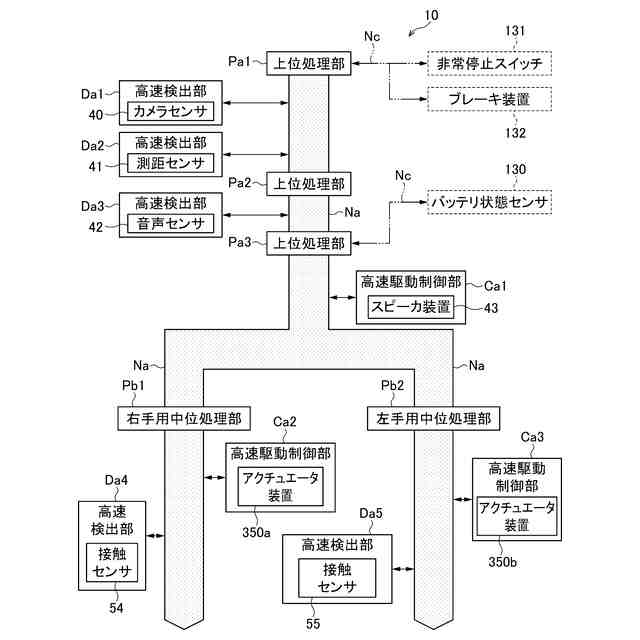
第1実施形態の制御装置の構成の一部を示すブロック図。
第1実施形態の制御装置の構成の一部を示すブロック図。
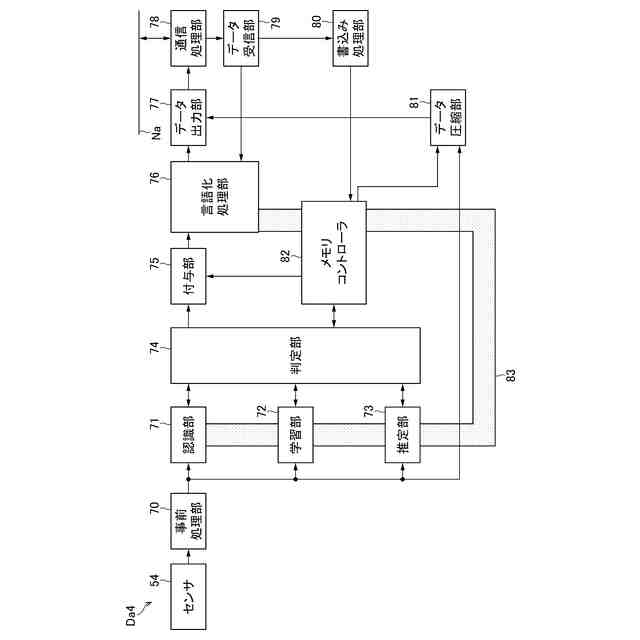
第1実施形態の検出部の構成を示すブロック図。
第1実施形態のニューラルネットワークの構成を示すブロック図。
第1実施形態のメモリコントローラの構成を示すブロック図。
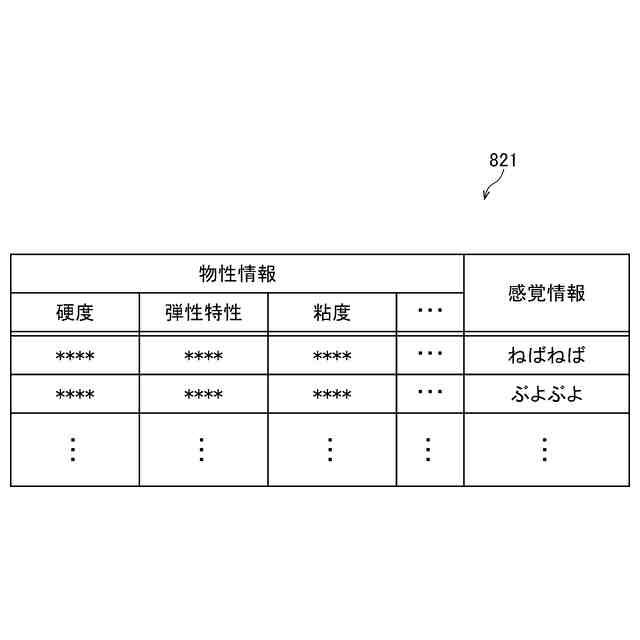
第1実施形態の意味ライブラリに含まれている情報の一例を模式的に示す図。
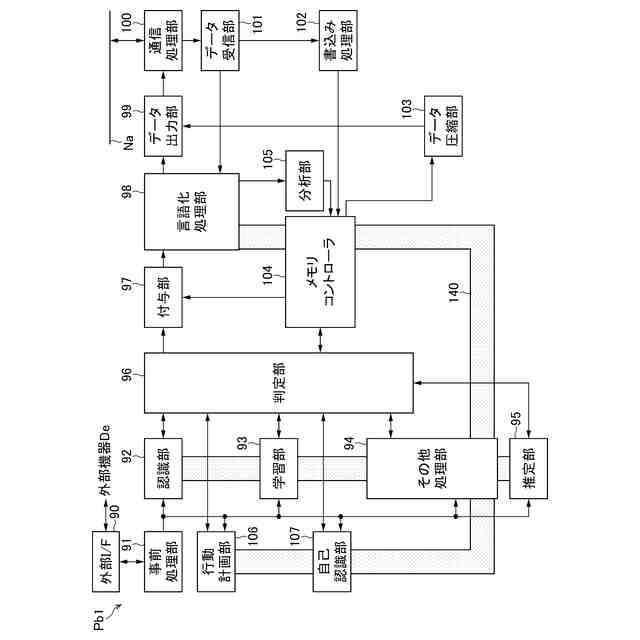
第1実施形態の処理部の構成を示すブロック図。
第1実施形態の意味ライブラリに含まれている情報の一例を模式的に示す図。
第1実施形態の駆動制御部の構成を示すブロック図。
第2実施形態の処理部の構成を示すブロック図。
第2実施形態の駆動制御部の構成を示すブロック図。
第3実施形態の検出部及び処理部のそれぞれの一部の構成を示すブロック図。
第3実施形態の処理部及び駆動制御部のそれぞれの一部の構成を示すブロック図。
【発明を実施するための形態】
【0010】
以下制御装置の一実施形態について図面を参照しながら説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ