TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106642
公報種別
公開特許公報(A)
公開日
2025-07-16
出願番号
2022093584
出願日
2022-06-09
発明の名称
車載装置、車載システム、サーバコンピュータ、推奨経路判定方法及びコンピュータプログラム
出願人
住友電気工業株式会社
,
株式会社オートネットワーク技術研究所
,
住友電装株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
21/34 20060101AFI20250709BHJP(測定;試験)
要約
【課題】目的地までの効率的な移動を可能とする推奨経路を決定できる車載装置、車載システム、サーバコンピュータ、推奨経路判定方法及びコンピュータプログラムを提供する。
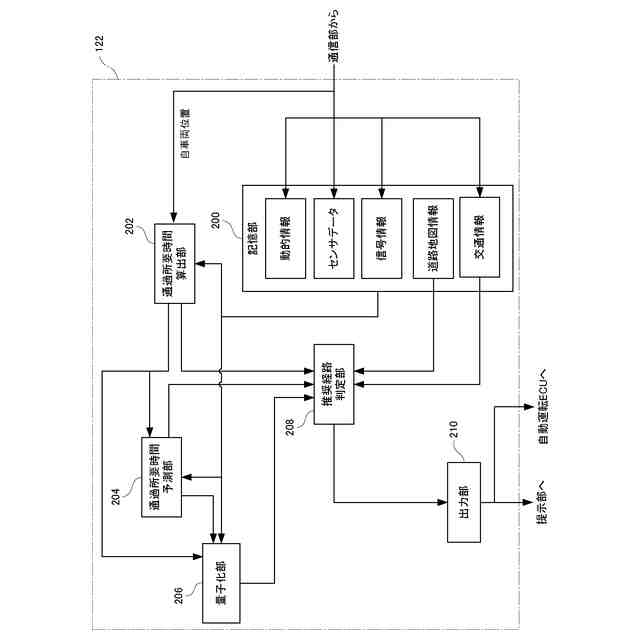
【解決手段】車載装置は、経路案内機能を有する車両に搭載される車載装置であって、車両が、車両の現在位置から、車両の走行方向に位置する第1交差点を通過するまでに要する時間である第1所要時間を、第1交差点の状況情報を用いて算出する通過所要時間算出部と、第1交差点を基準として所定の位置関係にある第2交差点に関して、車両が第1交差点を通過してから第2交差点を通過するまでに要する時間である第2所要時間を予測する通過所要時間予測部と、車両が目的地までに通過し得る経路の中から推奨経路を判定する判定部とを含み、判定部は、第1所要時間及び第2所要時間を推奨経路の判定に使用する。
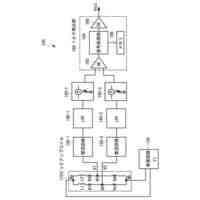
【選択図】図5
特許請求の範囲
【請求項1】
経路案内機能を有する車両に搭載される車載装置であって、
前記車両が、前記車両の現在位置から、前記車両の走行方向に位置する第1交差点を通過するまでに要する時間である第1所要時間を、前記第1交差点の状況情報を用いて算出する通過所要時間算出部と、
前記第1交差点を基準として所定の位置関係にある第2交差点に関して、前記車両が前記第1交差点を通過してから前記第2交差点を通過するまでに要する時間である第2所要時間を予測する通過所要時間予測部と、
前記車両が目的地までに通過し得る経路の中から推奨経路を判定する判定部とを含み、
前記判定部は、前記第1所要時間及び前記第2所要時間を前記推奨経路の判定に使用する、車載装置。
続きを表示(約 1,700 文字)
【請求項2】
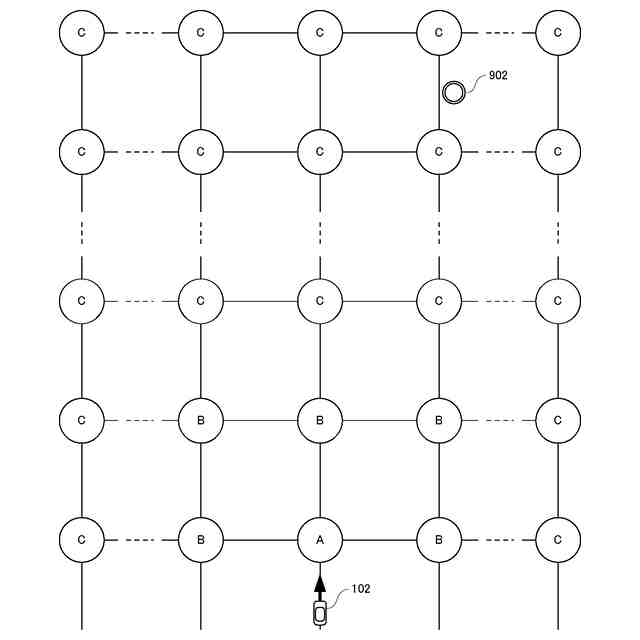
前記車両が前記目的地までに走行し得る交差点のうち、前記第1交差点及び前記第2交差点以外の交差点である第3交差点に関して、前記車両と異なる他車両が前記第3交差点を通過するのに要する時間を表す離散情報を決定する量子化部をさらに含み、
前記判定部は、前記経路に含まれる前記第1交差点、前記第2交差点及び前記第3交差点のそれぞれに関する前記第1所要時間、前記第2所要時間及び前記離散情報に基づいて、前記推奨経路を判定する、請求項1に記載の車載装置。
【請求項3】
前記状況情報は、前記第1交差点の信号情報、及び前記第1交差点を含む第1の所定範囲内に位置する動的物体に関する動的情報の少なくとも一方を含む、請求項1又は請求項2に記載の車載装置。
【請求項4】
前記第1交差点は、前記車両の走行方向に位置する、前記車両に最も近い交差点である、請求項1又は請求項2に記載の車載装置。
【請求項5】
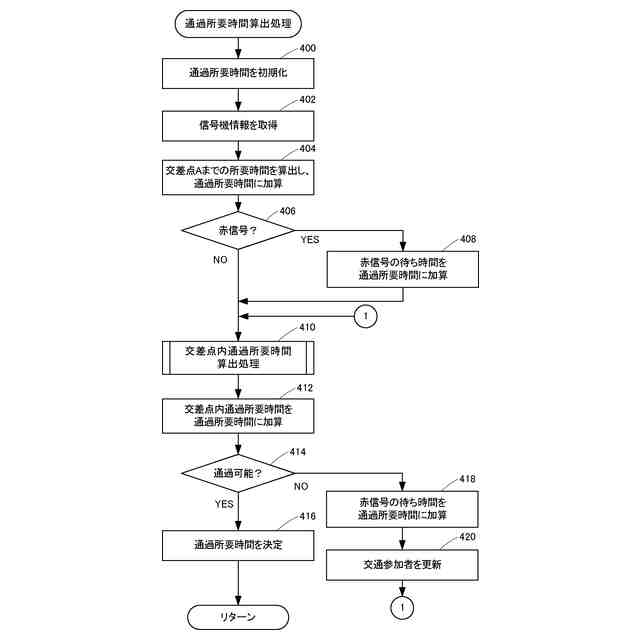
前記第1所要時間は、前記車両が、前記車両の現在位置から前記第1交差点に到達するまでに要する時間と、前記車両が前記第1交差点に到達してから前記車両が前記第1交差点を通過するまでに要する第1交差点内通過所要時間とを含み、
前記通過所要時間算出部は、
前記第1交差点を含む第1の所定範囲内に位置する動的物体の中から、前記車両が前記第1交差点を通過する過程において、前記車両と交差する動的物体を第1交通参加者として特定し、
前記第1交通参加者の各々の前記第1交差点の通過に関する優先順位に基づいて、前記第1交差点内通過所要時間を算出する、請求項1又は請求項2に記載の車載装置。
【請求項6】
前記第2所要時間は、前記車両が、前記第1交差点から前記第2交差点に到達するまでに要する時間と、前記車両が前記第2交差点に到達してから前記車両が前記第2交差点を通過するまでに要する第2交差点内通過所要時間とを含み、
前記通過所要時間予測部は、
前記第2交差点を含む第2の所定範囲内に位置する動的物体に関する最新の動的情報を用いて、当該動的情報が生成されてから所定時間が経過した後に前記第2交差点を含む前記第2の所定範囲内に位置する前記動的物体の新たな動的情報を生成し、
前記新たな動的情報に対応する動的物体の中から、前記車両が前記第2交差点を通過する過程において、前記車両と交差する動的物体を第2交通参加者として特定し、
前記第2交通参加者の各々の前記第2交差点の通過に関する優先順位に基づいて、前記第2交差点内通過所要時間を算出する、請求項1又は請求項2に記載の車載装置。
【請求項7】
前記所定時間は、
前記第1所要時間に基づいて決定され、
前記第1所要時間よりも長い時間である、請求項6に記載の車載装置。
【請求項8】
前記量子化部は、
前記第3交差点を、前記他車両が通行可能な方向の各々に関して、前記他車両が前記第3交差点を通過するのに要する時間である第3交差点内通過所要時間を、前記第3交差点の信号情報及び前記第3交差点を含む所定範囲内に位置する動的物体に関する動的情報を用いて算出し、
前記第3交差点内通過所要時間に対応する前記離散情報を決定する、請求項2に記載の車載装置。
【請求項9】
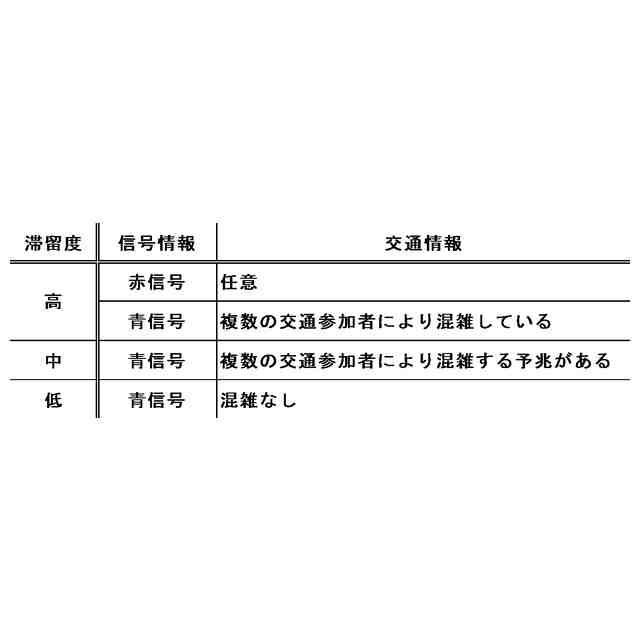
前記量子化部は、前記第3交差点を含む所定範囲内に位置する動的物体の数、前記数の時間的変化傾向、及び前記車両の外部から受信した前記第3交差点の交通情報に基づいて前記離散情報を決定する、請求項2に記載の車載装置。
【請求項10】
前記離散情報は、時間を表し、
前記判定部は、
前記経路の各々に関し、前記第1所要時間、前記第2所要時間及び前記離散情報を加算して旅行時間を算出し、
前記旅行時間が最小である経路を、前記推奨経路と判定する、請求項2に記載の車載装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車載装置、車載システム、サーバコンピュータ、推奨経路判定方法及びコンピュータプログラムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
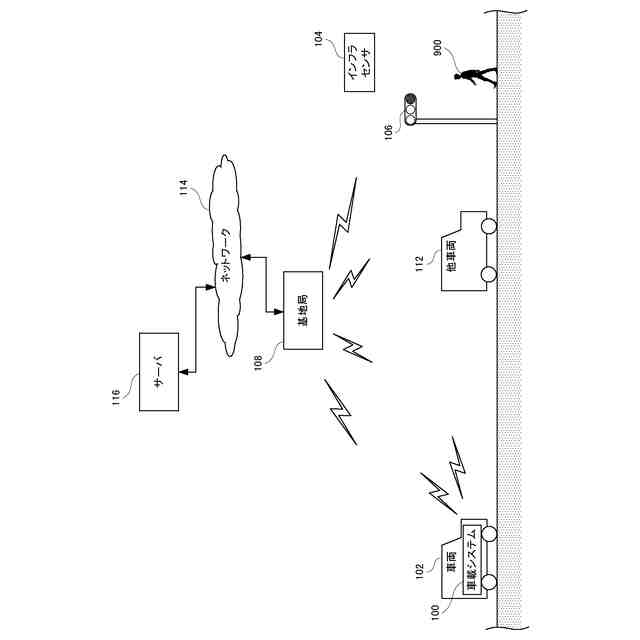
カーナビゲーションシステム等において、数km~数十km規模の道路地図の範囲(以下、広域エリアという)を対象として、自動車及び自動二輪車等(以下、車両という)の経路案内が行われている。その際、経路距離に加えて渋滞情報等の統計情報を用いた車両の走行経路の制御が行われる。また、道路及びその周辺に設置された種々のセンサ機器(カメラ、レーダ等)からセンサの情報を収集し、それを解析して運転支援情報として車両に提供する運転支援システムも提案されている。この運転支援システムにおいては、単一又は隣接する交差点規模の道路地図の範囲(以下、狭域エリアという)を対象として、検知物体(例えば、人及び車両等の動的物体)及び信号情報等のリアルタイム情報を用いた車両の制御(例えば速度制御)が行われている。
【0003】
下記特許文献1には、車両の経路誘導時における目的地までの所要時間を算出する所要時間算出装置が開示されている。この所要時間算出装置は、交差点における停止コストを正確に算出して目的地までの所要時間の予測精度を向上させる。具体的には、複数車両の走行履歴データに基づいて交差点における停止確率と停止時間とを走行条件に応じて算出し、それを分類して交差点コストマップを作成する。作成された交差点コストマップに基づいて交差点における損失時間を算出し、車両の目的地までの所要時間を算出する。
【0004】
下記特許文献2には、交差点等の状況に応じて適切に経路を変更する経路案内装置が開示されている。この経路案内装置は、車両に搭載されて、車両を目的地まで案内する。経路案内装置は、現在地から目的地までの距離又は所要時間のうち少なくとも一方を示す到達予定値を取得し、経路上において通過する交差点及び横断歩道周辺の状況情報を取得し、状況情報と到達予定値とに基づいて経路を変更する。具体的には、経路案内装置は、到達予定値に基づいて車両の現在位置が目的地に近いか否かを判定する。経路案内装置はさらに、次の交差点が経路変更を推奨する状況か否かを状況情報に基づいて判定する。車両の現在位置が目的地から離れている場合、次の交差点において経路変更を推奨する状況であれば、経路案内装置は経路を変更する。一方、車両の現在位置が目的地に近い場合、経路案内装置は経路変更を推奨する状況であっても経路を変更しない。これにより、利用者の利便性を確保する。
【先行技術文献】
【特許文献】
【0005】
特開2014-106675号公報
特開2018-36193号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
広域エリアを対象とした従来の経路制御は渋滞情報等の統計情報を用いるため、走行経路上の交差点の状況(例えば、混雑度、信号の点灯状態等)によっては、効率的な移動が阻害される可能性がある。統計情報として交差点コストマップを用いる特許文献1においてもこのような問題が生じ得る。一方、特許文献2は、次の交差点の状況情報を用いて次の交差点において経路を変更するか否かを判定する。しかし、経路変更の判定においては、次の交差点を通過した後の交通状況は何ら考慮されないので、特許文献2の技術を用いた場合、目的地までの所要時間が却って長くなる可能性がある。即ち、特許文献2においても特許文献1と同様、効率的な移動が阻害される可能性がある。そのため、特許文献1及び特許文献2のいずれに開示された技術にも、目的地までの効率的な移動を可能とする経路案内を行うことが困難であるという問題がある。
【0007】
したがって、本開示は、目的地までの効率的な移動を可能とする推奨経路を決定できる車載装置、車載システム、サーバコンピュータ、推奨経路判定方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
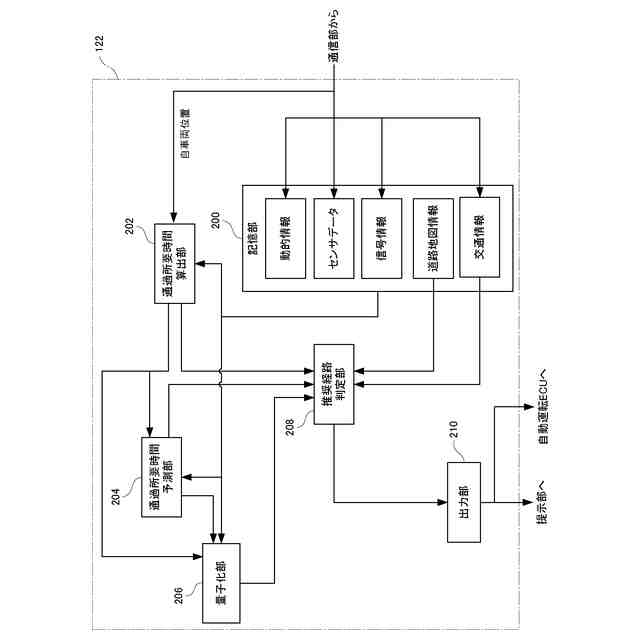
本開示のある局面に係る車載装置は、経路案内機能を有する車両に搭載される車載装置であって、車両が、車両の現在位置から、車両の走行方向に位置する第1交差点を通過するまでに要する時間である第1所要時間を、第1交差点の状況情報を用いて算出する通過所要時間算出部と、第1交差点を基準として所定の位置関係にある第2交差点に関して、車両が第1交差点を通過してから第2交差点を通過するまでに要する時間である第2所要時間を予測する通過所要時間予測部と、車両が目的地までに通過し得る経路の中から推奨経路を判定する判定部とを含み、判定部は、第1所要時間及び第2所要時間を推奨経路の判定に使用する。
【0009】
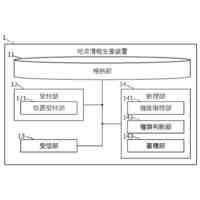
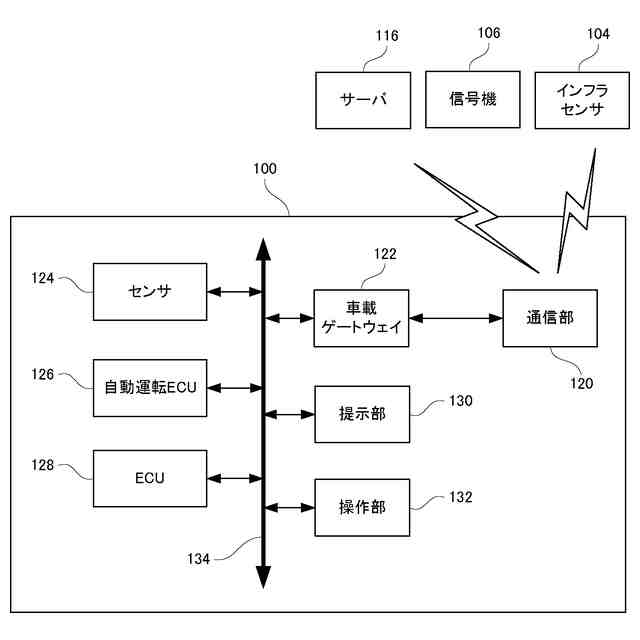
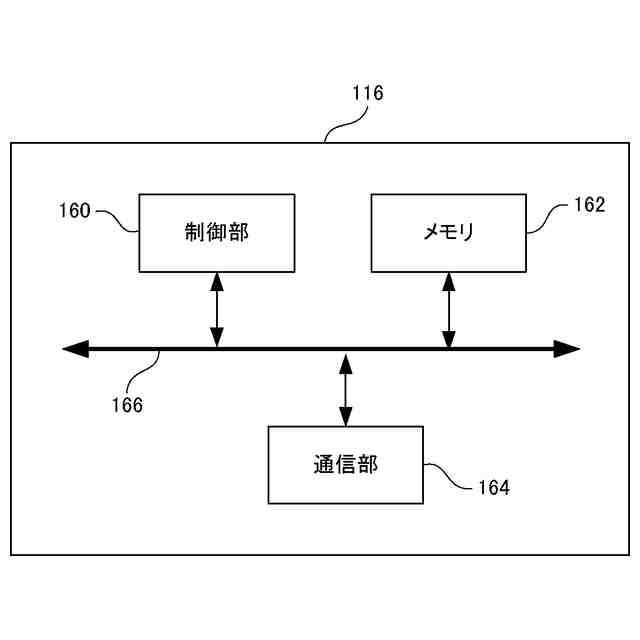
本開示の別の局面に係る車載システムは、経路案内機能を有する車両に搭載される車載システムであって、経路案内機能の実行部と、上記の車載装置と、状況情報を取得する通信部とを含み、実行部は、推奨経路を提示することにより経路案内機能を実行する。
【0010】
本開示のさらに別の局面に係るサーバコンピュータは、経路案内機能を有する車両から車両の目的地を受信する通信部と、車両が、車両の現在位置から、車両の走行方向に位置する第1交差点を通過するまでに要する時間である第1所要時間を、第1交差点の状況情報を用いて算出する通過所要時間算出部と、第1交差点を基準として所定の位置関係にある第2交差点に関して、車両が第1交差点を通過してから第2交差点を通過するまでに要する時間である第2所要時間を予測する通過所要時間予測部と、第1所要時間及び第2所要時間に基づいて、車両が目的地までに通過し得る経路の中から推奨経路を判定する判定部とを含み、通信部は、さらに推奨経路を車両に送信する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
18日前
株式会社東光高岳
計器
14日前
株式会社ミツトヨ
測定器
11日前
日本精機株式会社
液面検出装置
20日前
大和製衡株式会社
組合せ秤
20日前
有限会社原製作所
検出回路
1か月前
大和製衡株式会社
組合せ秤
20日前
大和製衡株式会社
組合せ秤
26日前
大同特殊鋼株式会社
疵検出方法
11日前
個人
フロートレス液面センサー
1か月前
株式会社リコー
光学機器
1か月前
日本特殊陶業株式会社
ガスセンサ
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
キヤノン株式会社
放射線撮像装置
1か月前
日本特殊陶業株式会社
ガスセンサ
21日前
日本特殊陶業株式会社
ガスセンサ
21日前
ダイハツ工業株式会社
試験用治具
26日前
エグゼヴィータ株式会社
端末装置
12日前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社クボタ
作業車
25日前
タカノ株式会社
試料分析装置
11日前
バイオテック株式会社
容器設置装置
12日前
大同特殊鋼株式会社
座標系較正方法
1か月前
富士電機株式会社
エンコーダ
13日前
タカノ株式会社
試料分析装置
11日前
富士電機株式会社
エンコーダ
13日前
柳井電機工業株式会社
部材検査装置
12日前
大同特殊鋼株式会社
ラベル色特定方法
1か月前
旭光電機株式会社
漏出検出装置
1か月前
トヨタ自動車株式会社
歯車の検査方法
21日前
新電元メカトロニクス株式会社
位置検出装置
18日前
株式会社フジキン
流量測定装置
27日前
株式会社ノーリツ
通信システム
18日前
TDK株式会社
計測装置
19日前
JNC株式会社
トランジスタ型センサ
11日前
JNC株式会社
トランジスタ型センサ
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ