TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110467
公報種別
公開特許公報(A)
公開日
2025-07-29
出願番号
2024004316
出願日
2024-01-16
発明の名称
飛しょう体
出願人
三菱電機株式会社
代理人
個人
主分類
F42B
10/66 20060101AFI20250722BHJP(弾薬;爆破)
要約
【課題】推進性能を向上させて、高速で移動する目標への誘導精度を向上させることができる飛しょう体を得ること。
【解決手段】地対空、艦対空、または空対空に対応する飛しょう体1は、推力偏向角を制御して推力軸を変化させる推力偏向装置6を有する回転デトネーションエンジン5と、複数のノズルを有するパルスデトネーションエンジン7と、目標の追尾情報を得るシーカ2と、飛しょう体1の慣性情報を得る慣性装置3と、追尾情報および慣性情報に基づき目標との予想会合点までの誤差の修正に必要な回転デトネーションエンジン5の推力指令および推力偏向角指令と、パルスデトネーションエンジン7のノズル推力指令とを演算して回転デトネーションエンジン5およびパルスデトネーションエンジン7に出力するオートパイロット4と、を備える。
【選択図】図10
特許請求の範囲
【請求項1】
地対空、艦対空、または空対空に対応する飛しょう体において、
推力偏向角を制御して推力軸を変化させる推力偏向装置を有する回転デトネーションエンジンと、
複数のノズルを有するパルスデトネーションエンジンと、
目標の追尾情報を得るシーカと、
飛しょう体の慣性情報を得る慣性装置と、
前記追尾情報および前記慣性情報に基づき前記目標との予想会合点までの誤差の修正に必要な前記回転デトネーションエンジンの推力指令および推力偏向角指令と、前記パルスデトネーションエンジンのノズル推力指令とを演算して前記回転デトネーションエンジンおよびパルスデトネーションエンジンに出力するオートパイロットと、を備える
ことを特徴とする飛しょう体。
続きを表示(約 300 文字)
【請求項2】
推力軸が飛しょう体の重心に重なるように、前記推力偏向装置の位置および角度を制御することを特徴とする請求項1に記載の飛しょう体。
【請求項3】
操舵角が変化可能な複数の操舵翼を有する操舵装置を備え、
前記オートパイロットは、高度が第1閾値より小さいとき、複数の前記操舵翼の操舵角を制御することを特徴とする請求項1に記載の飛しょう体。
【請求項4】
展開角が変化可能な複数のフラップを備え、
前記オートパイロットは、高度が第2閾値より小さいとき、複数の前記フラップの展開角を制御することを特徴とする請求項1に記載の飛しょう体。
発明の詳細な説明
【技術分野】
【0001】
本開示は、地対空、艦対空、空対空に対応する飛しょう体に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、地対空、艦対空、空対空に対応する飛しょう体を目標へ誘導する手段として、中期誘導では、燃焼現象を用いたロケットモータによる加速と操舵翼による空気力制御等が提案され、終末誘導では、燃焼現象を用いたサイドスラスタ等が提案されていた。
【0003】
特許文献1には、機体の機軸と直交する方向にガスを放出し、機体の並進運動および回転運動を制御する、燃焼現象を用いたサイドスラスタが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開平11-336612号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示されている燃焼現象を用いたサイドスラスタでは、機体の並進方向の加速度が小さいため、高速で移動する目標への誘導精度が低くなるという課題があった。
【0006】
本開示は、上記に鑑みてなされたものであって、推進性能を向上させて、高速で移動する目標への誘導精度を向上させることができる飛しょう体を得ることを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本開示にかかる飛しょう体は、地対空、艦対空、または空対空に対応する飛しょう体である。飛しょう体は、推力偏向角を制御して推力軸を変化させる推力偏向装置を有する回転デトネーションエンジンと、複数のノズルを有するパルスデトネーションエンジンと、目標の追尾情報を得るシーカと、飛しょう体の慣性情報を得る慣性装置と、追尾情報および慣性情報に基づき目標との予想会合点までの誤差の修正に必要な回転デトネーションエンジンの推力指令および推力偏向角指令と、パルスデトネーションエンジンのノズル推力指令とを演算して回転デトネーションエンジンおよびパルスデトネーションエンジンに出力するオートパイロットと、を備える。
【発明の効果】
【0008】
本開示にかかる飛しょう体によれば、推進性能を向上させて、高速で移動する目標への誘導精度を向上させることができる、という効果を奏する。
【図面の簡単な説明】
【0009】
実施の形態1にかかる飛しょう体の構成を示す正面断面図
実施の形態1にかかる飛しょう体の構成を示す側面断面図
実施の形態1にかかる飛しょう体の構成を示す側面断面図
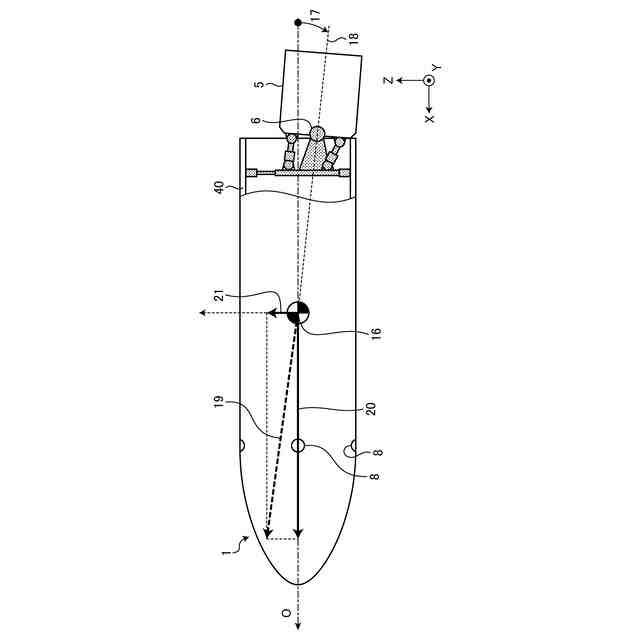
実施の形態1にかかる飛しょう体の回転デトネーションエンジンの推力偏向装置の動作を説明するための正面一部断面図
実施の形態1にかかる飛しょう体の回転デトネーションエンジンの側面図
実施の形態1にかかる飛しょう体のパルスデトネーションエンジンの動作を説明するための正面図
実施の形態1にかかる飛しょう体のパルスデトネーションエンジンの動作を説明するための側面断面図
実施の形態1にかかる飛しょう体のパルスデトネーションエンジンの動作を説明するための側面断面図
実施の形態1にかかる飛しょう体のパルスデトネーションエンジンの動作を説明するための側面断面図
実施の形態1にかかる飛しょう体の制御系の構成を示すブロック図
実施の形態2にかかる飛しょう体の構成を示す正面図
実施の形態2にかかる飛しょう体の構成を示す側面断面図
実施の形態2にかかる飛しょう体の制御系の構成を示すブロック図
実施の形態3にかかる飛しょう体の構成を示す正面図
実施の形態3にかかる飛しょう体の構成を示す側面断面図
実施の形態3にかかる飛しょう体の制御系の構成を示すブロック図
【発明を実施するための形態】
【0010】
以下に、実施の形態にかかる飛しょう体を図面に基づいて詳細に説明する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る





 特許ウォッチ
特許ウォッチ