TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111348
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024005731
出願日
2024-01-17
発明の名称
制御システム、及び制御装置
出願人
コネクテッドロボティクス株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20250723BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの動作に要する時間を、より適切に制御すること。
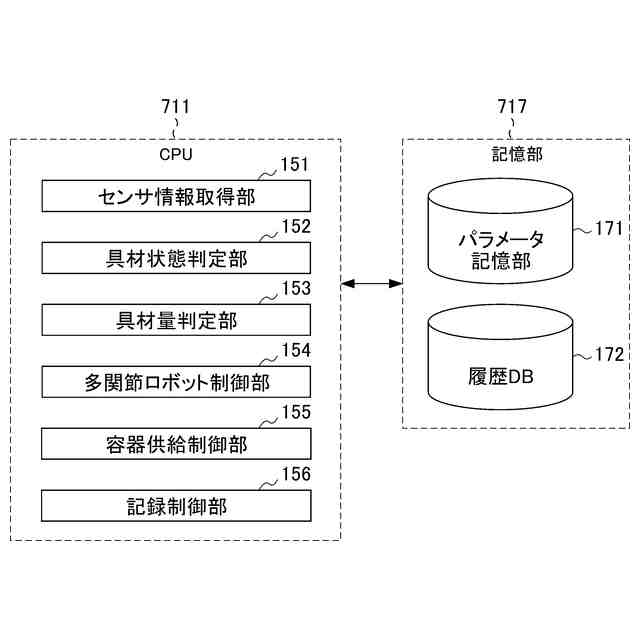
【解決手段】制御システム1は、把持部材31aを備えた多関節ロボット30と、多関節ロボット30の動作を制御する制御装置40と、を備える。制御装置40は、把持部材31aにより、具材の保持及び具材の解放の少なくても何れかを行う主動作と、主動作を補助するために行う補助動作と、を多関節ロボット30に実行させる。さらに、制御装置40は、主動作を実行させる時間に対して、補助動作を実行させる時間を第1の長さとする第1のモードと、主動作を実行させる時間に対して、補助動作を実行させる時間を第1の長さよりも短い長さである第2の長さとする第2のモードと、を切り替える。
【選択図】図7
特許請求の範囲
【請求項1】
保持部材を備えたロボットと、前記ロボットの動作を制御する制御装置と、を備えた制御システムであって、
前記制御装置は、
前記保持部材により、対象物の保持及び前記対象物の解放の少なくても何れかを行う主動作と、
前記主動作を補助するために行う補助動作と、
を前記ロボットに実行させると共に、
前記主動作を実行させる時間に対して、前記補助動作を実行させる時間を第1の長さとする第1のモードと、前記主動作を実行させる時間に対して、前記補助動作を実行させる時間を前記第1の長さよりも短い長さである第2の長さとする第2のモードと、を切り替える、
ことを特徴とする制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記制御装置は、
当該制御システムに要求される物理量に関する条件に応じて、前記第1のモードと、前記第2のモードを切り替える、
ことを特徴とする請求項1に記載の制御システム。
【請求項3】
前記補助動作として、少なくとも前記保持の対象とする対象物の表面高さを検出する動作を含み、
前記制御装置は、
前記第2のモードでは、前記第1のモードよりも前記対象物の表面高さを検出する動作の実行対象範囲、又は、実行頻度を調整することで、前記補助動作を実行させる時間を前記第1の長さよりも短い長さである前記第2の長さとする、
ことを特徴とする請求項1又は2に記載の制御システム。
【請求項4】
前記補助動作として、少なくとも保持をした対象物の物理量の計測値が安定するまで待機する動作を含み、
前記制御装置は、
前記第2のモードでは、前記第1のモードよりも前記待機する動作の1回あたりの実行時間、又は、実行頻度を調整することで、前記補助動作を実行させる時間を前記第1の長さよりも短い長さである前記第2の長さとする、
ことを特徴とする請求項1又は2に記載の制御システム。
【請求項5】
前記補助動作として、少なくとも前記保持部材に付着した対象物を除去する動作を含み、
前記制御装置は、
前記第2のモードでは、前記第1のモードよりも前記除去する動作を実行するか否かの判定基準、又は、実行頻度を調整することで、前記補助動作を実行させる時間を前記第1の長さよりも短い長さである前記第2の長さとする、
ことを特徴とする請求項1又は2に記載の制御システム。
【請求項6】
前記制御装置は、
前記保持の対象とする対象物が何であるのかに応じて、前記第1のモードと、前記第2のモードとを切り替えるか否かを決定する、
ことを特徴とする請求項1又は2に記載の制御システム。
【請求項7】
前記制御装置は、
当該制御システムに要求される制限を満たすことを基準に、前記第1のモードと、前記第2のモードとの何れかをユーザに推奨する、
ことを特徴とする請求項1又は2に記載の制御システム。
【請求項8】
当該制御システムは、前記ロボットを複数台有しており、
前記制御装置は、前記複数台のロボットが同じモードとなるようにして、前記第1のモードと、前記第2のモードとを切り替える、
ことを特徴とする請求項1又は2に記載の制御システム。
【請求項9】
保持部材を備えたロボットの動作を制御する制御手段を備えた制御装置であって、
前記制御手段は、
前記保持部材により、対象物の保持及び前記対象物の解放の少なくても何れかを実行する主動作と、
前記主動作を補助するために行う補助動作と、
を前記ロボットに実行させると共に、
前記主動作を実行させる時間に対して、前記補助動作を実行させる時間を第1の長さとする第1のモードと、前記主動作を実行させる時間に対して、前記補助動作を実行させる時間を前記第1の長さよりも短い長さである第2の長さとする第2のモードと、を切り替える、
ことを特徴とする制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム、及び制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、把持部材や吸着部材等の機構を用いて対象物を保持するロボットにより、様々な作業が行われている。例えば、食品を保持して盛り付ける場合、バットや番重といった収容容器に収容された食品をロボットが保持し、容器等の解放先まで移送してから、解放を実行するという作業が実現される。
このような、保持や解放を行う機能を備えたロボットに関する技術は、例えば、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7364283号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
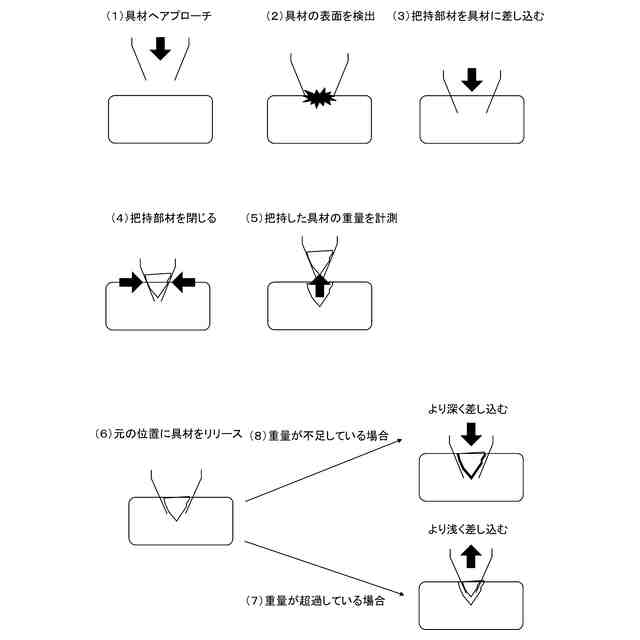
特許文献1には、容器に解放された食品の重量が規定量に近づくように、様々な動作を行うことが開示されている。例えば、収容容器内の食品の表面の高さを検出したり、保持した食品の測定値が安定するまで待機したり、保持する部材に付着した食品を除去したりする動作を行うことが開示されている。このような、様々な動作を行うことにより、容器に解放される食品の重量を、より精度高く規定量に近づけたり、ロボットや収容容器のメンテナンスを簡便にしたりすることができる。
【0005】
ところで、場合によっては、このような動作の重要性が低い場合もある。例えば、解放された食品の販売態様が量り売りであり、重量に比例して売価が決まるような場合は、各容器に解放されて盛り付けられた食品の重量について、多少の誤差が許容されることもある。あるいは、例えば、ロボットや収容容器のメンテナンスを多少煩雑となっても許容されることもある。そして、このような場合は、容器に盛り付けられる食品の重量を精度高く規定量に近づけたり、ロボットや収容容器のメンテナンスを簡便にしたりすることよりも、解放までに要する時間をできるだけ短縮したいというニーズが生じる。
【0006】
しかしながら、従来の技術では、このような課題に対して十分に対応できておらず、未だ改善の余地があった。また、このような課題は、保持や解放をする対象物が食品である場合に限られるものではなく、工業分野等の、ロボットによる保持や解放を行う様々な分野全般に共通するものである。
【0007】
本発明の課題は、ロボットの動作に要する時間を、より適切に制御することである。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明の一実施形態に係る制御システムは、
保持部材を備えたロボットと、前記ロボットの動作を制御する制御装置と、を備えた制御システムであって、
前記制御装置は、
前記保持部材により、対象物の保持及び前記対象物の解放の少なくても何れかを行う主動作と、
前記主動作を補助するために行う補助動作と、
を前記ロボットに実行させると共に、
前記主動作を実行させる時間に対して、前記補助動作を実行させる時間を第1の長さとする第1のモードと、前記主動作を実行させる時間に対して、前記補助動作を実行させる時間を前記第1の長さよりも短い長さである第2の長さとする第2のモードと、を切り替える、
ことを特徴とする。
【発明の効果】
【0009】
本発明によれば、ロボットの動作に要する時間を、より適切に制御することができる。
【図面の簡単な説明】
【0010】
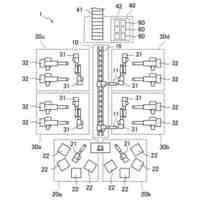
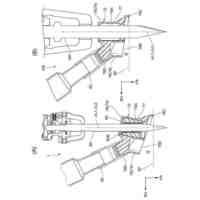
本発明に係る制御システム1が複数並べられた状態を示す斜視図である。
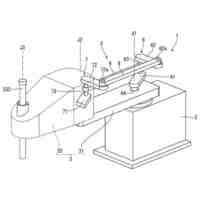
本発明に係る制御システム1の主要部を拡大した斜視図である。
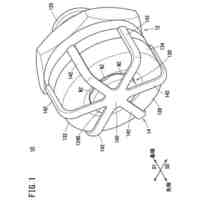
ハンド31の先端に設置される把持部材31aの形状例を示す模式図である。
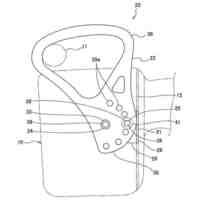
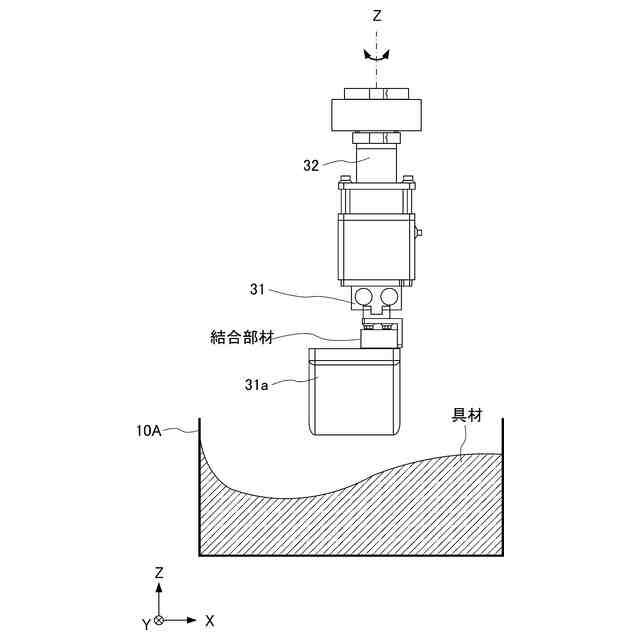
把持動作等の動作を実行する場合の、収容空間10A、ハンド31、把持部材31a、ロボットアーム32、及び具材の位置関係について示す図である。
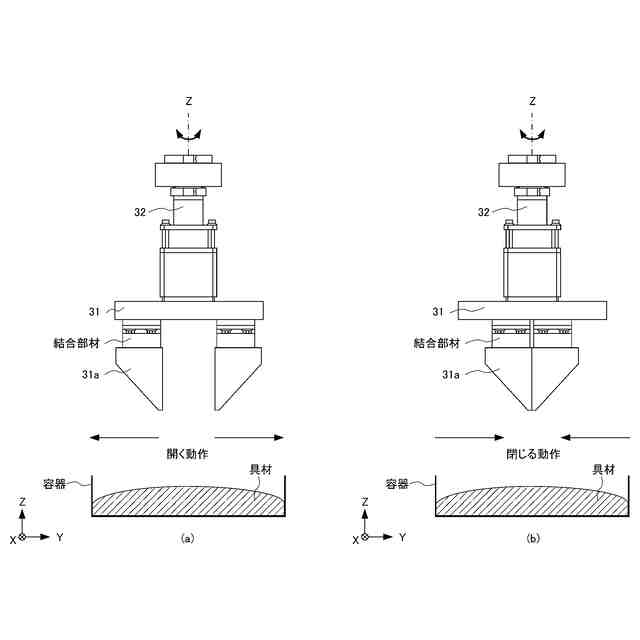
一対の把持部材31aの開閉について示す図である。
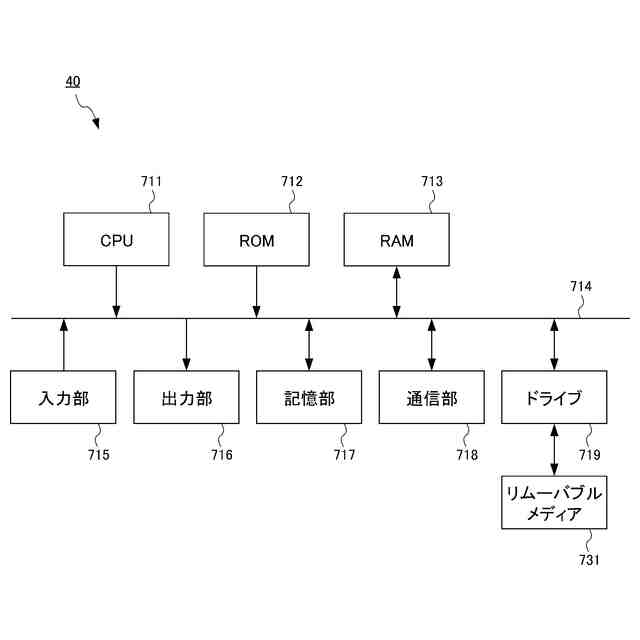
制御装置40のハードウェア構成を示す模式図である。
制御装置40の機能的構成を示すブロック図である。
履歴DB172に記憶される具材状態マップについて説明するための図であって、具材収容部10の収容空間10Aを鉛直上方から俯瞰した図である。
多関節ロボット30による表面検出動作、及び把持動作の一例を示す模式図である。
多関節ロボット30による移送動作、解放動作、及び整形動作の一例を示す模式図である。
多関節ロボット30による整形動作の一例を示す模式図である。
多関節ロボット30による付着具材除去動作の一例を示す模式図である。
制御システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
制御システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
28日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
29日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
28日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
29日前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
1日前
オークラ輸送機株式会社
ハンド装置
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
6日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社清水製作所
電動工具の吊下げ具
10日前
SMC株式会社
ベルヌーイグリッパ
1か月前
セイコーエプソン株式会社
ロボット
1か月前
コネクテッドロボティクス株式会社
保持システム
3日前
株式会社マキタ
電動工具
1か月前
川崎重工業株式会社
作業設備
7日前
北越メタル株式会社
鉄筋保持具
6日前
株式会社マキタ
打撃工具
6日前
株式会社マキタ
回転工具
1か月前
株式会社マキタ
打撃工具
10日前
工機ホールディングス株式会社
集塵装置及び作業機
28日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ