TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113117
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024085055
出願日
2024-05-24
発明の名称
ユーザカスタマイズドリフト制御方法及びユーザカスタマイズドリフト制御装置
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
代理人
弁理士法人共生国際特許事務所
主分類
B60W
30/182 20200101AFI20250725BHJP(車両一般)
要約
【課題】運転者の選択度合いに応じてドリフト制御を差分実行できるユーザカスタマイズドリフト制御方法及びユーザカスタマイズドリフト制御装置を提供する。
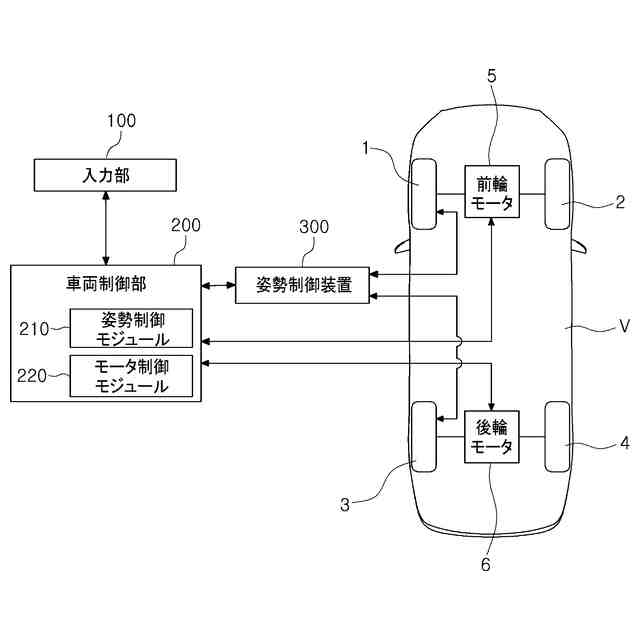
【解決手段】本発明のユーザカスタマイズドリフト制御方法は、ドリフトモード活性化条件に基づいて、ドリフトモードへの進入可否を判断する段階、ドリフトモード活性化条件を満たさない場合、基本モード制御を行う段階、ドリフトモード活性化条件を満たす場合、ドリフトモードに入る段階、ドリフトモードへの進入に基づいて、ユーザからアクセル反応速度レベル、姿勢制御アシストレベル、及び路面情報のうち少なくとも一つを含む入力情報を受信する段階、及び入力情報に基づいて、ユーザカスタマイズドリフト制御を行う段階を含む。
【選択図】図1
特許請求の範囲
【請求項1】
ドリフトモード活性化条件に基づいて、ドリフトモードへの進入可否を判断する段階と、
前記ドリフトモード活性化条件を満たす場合、前記ドリフトモードに入る段階と、
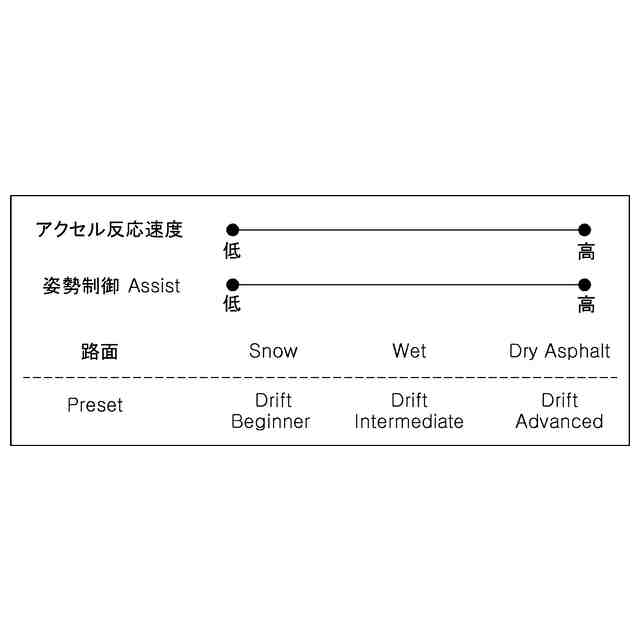
前記ドリフトモードへの進入に基づいて、ユーザからアクセル反応速度レベル、姿勢制御アシストレベル、及び路面情報のうち少なくとも一つを含む入力情報を受信する段階と、
前記入力情報に基づいて、ユーザカスタマイズドリフト制御を行う段階と、を含むことを特徴とするユーザカスタマイズドリフト制御方法。
続きを表示(約 1,500 文字)
【請求項2】
前記ユーザカスタマイズドリフト制御を行う段階は、
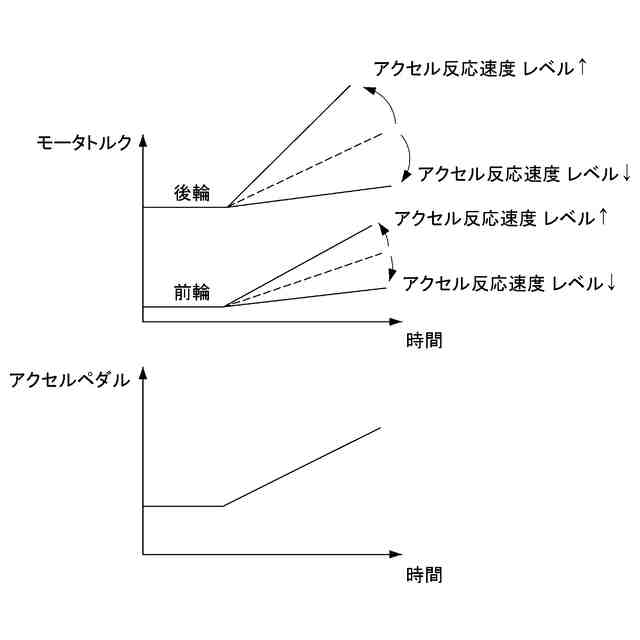
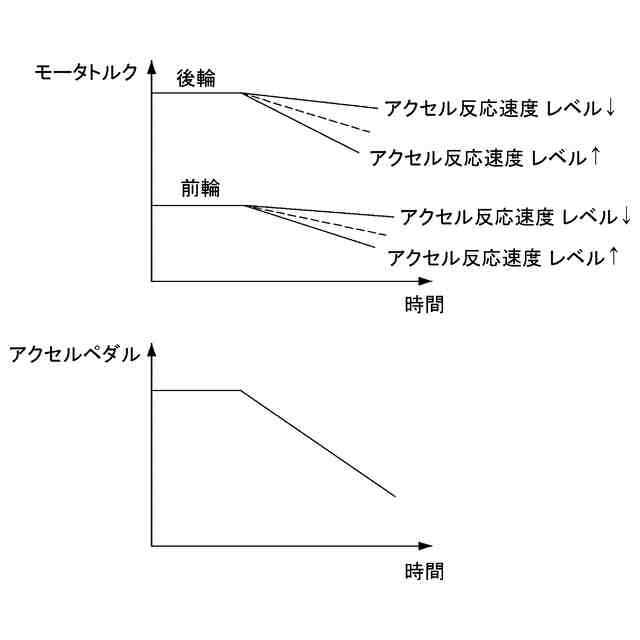
前記アクセル反応速度レベルに基づいて、アクセルペダルの踏み込み程度に応じた前輪モータトルクの傾き、及び後輪モータトルクの傾きを差分制御する段階を含むことを特徴とする請求項1に記載のユーザカスタマイズドリフト制御方法。
【請求項3】
前記モータトルクの傾きを差分制御する段階は、
前記アクセル反応速度レベルが高い場合、前記アクセルペダルの踏み込み程度に応じた前輪モータトルクの傾き、及び後輪モータトルクの傾きが基本モード制御よりも大きくなるように制御する段階と、
前記アクセル反応速度レベルが低い場合、前記アクセルペダルの踏み込み程度に応じた前輪モータトルクの傾き、及び後輪モータトルクの傾きが基本モード制御よりも小さくなるように制御する段階と、を含むことを特徴とする請求項2に記載のユーザカスタマイズドリフト制御方法。
【請求項4】
前記ユーザカスタマイズドリフト制御を行う段階は、
前記姿勢制御アシストレベルに基づいて、姿勢制御を行うための制御しきい値を差分設定する段階を含むことを特徴とする請求項1に記載のユーザカスタマイズドリフト制御方法。
【請求項5】
前記制御しきい値を差分設定する段階は、
前記姿勢制御アシストレベルが高い場合、前記制御しきい値を基本モード制御よりも低く設定する段階と、
前記姿勢制御アシストレベルが低い場合、前記制御しきい値を基本モード制御よりも高く設定する段階と、を含むことを特徴とする請求項4に記載のユーザカスタマイズドリフト制御方法。
【請求項6】
前記ユーザカスタマイズドリフト制御を行う段階は、
前記姿勢制御アシストレベルに基づいて、姿勢制御による制御量を差分設定する段階を含むことを特徴とする請求項1に記載のユーザカスタマイズドリフト制御方法。
【請求項7】
前記制御量を差分設定する段階は、
前記姿勢制御アシストレベルが高い場合、前記姿勢制御による制御量を基本モード制御よりも高く設定する段階と、
前記姿勢制御アシストレベルが低い場合、前記姿勢制御による制御量を基本モード制御よりも低く設定する段階と、を含むことを特徴とする請求項6に記載のユーザカスタマイズドリフト制御方法。
【請求項8】
前記ユーザカスタマイズドリフト制御を行う段階は、
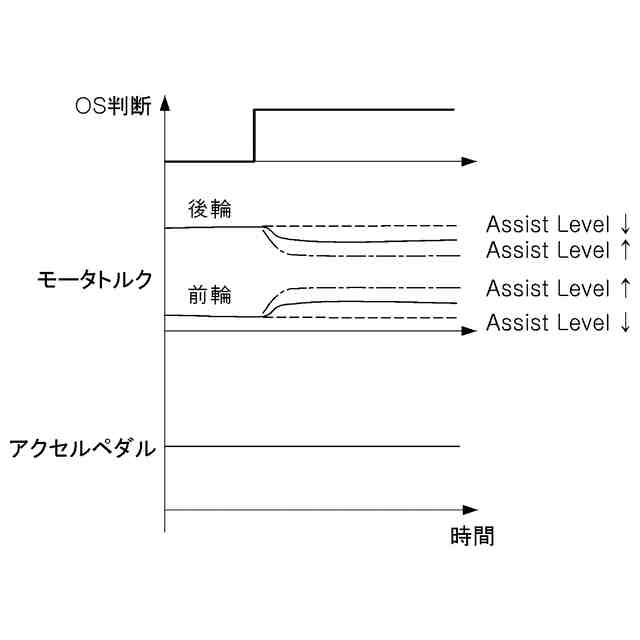
前記姿勢制御アシストレベルに基づいて、後輪モータトルクを低めて、前輪モータトルクを高める前輪強化制御モードの介入の程度を差分設定する段階を含むことを特徴とする請求項1に記載のユーザカスタマイズドリフト制御方法。
【請求項9】
前記前輪強化制御モードの介入の程度を差分設定する段階は、
前記姿勢制御アシストレベルが高い場合、前記前輪強化制御モードの介入の程度を高めることにより、後輪モータトルクをより低く、前輪モータトルクをより高く設定する段階と、
前記姿勢制御アシストレベルが低い場合、前記前輪強化制御モードの介入の程度を低めることにより、後輪モータトルクをより高く、前輪モータトルクをより低く設定する段階と、を含むことを特徴とする請求項8に記載のユーザカスタマイズドリフト制御方法。
【請求項10】
前記ドリフトモード活性化条件を満たさない場合、基本モード制御を行う段階をさらに含むことを特徴とする請求項1に記載のユーザカスタマイズドリフト制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ユーザの入力に応じてドリフト制御を差分実行するユーザカスタマイズドリフト制御方法及びユーザカスタマイズドリフト制御装置に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
最近、高出力車両の発売が増加し、単なる機能的な側面を越えて、運転者の運転による楽しみを考慮する制御要素が増えている。その一つが後輪ベースの自動車特性を利用したドリフト走行である。
【0003】
ドリフト走行とは、コーナーにおいて高い脱出速度(exit speed)を維持するために、運転者が自動車のコントロールを維持しながら意図的に後輪を滑らせ、過操向状態を誘発してコーナーを通過する技術である。電気自動車では、後輪モータにのみトルクを分配することで、上述したドリフト走行を実現する。
【0004】
後輪駆動の自動車は、駆動特性上、後輪タイヤの飽和が急速に発生する可能性があり、これは自動車のオーバーステア(Oversteer)につながりやすい。このとき、オーバーステアをコントロールすることで、ドリフト走行につなげる。
【0005】
従来は、運転者の運転スキル又はドリフトスキルを考慮してドリフト制御を行う技術がなかった。したがって、熟練した運転者は、ドリフト制御が所望の通りに十分でないか、又は所望しない制御を煩わしく感じる場合があり、運転初心者はドリフト制御時に、車両コントロールが難しいと感じる場合があった。
【0006】
これを改善するために、運転者の入力を受けて、運転者が所望する程度にドリフト制御を差分して実行する技術が望まれる。
【先行技術文献】
【特許文献】
【0007】
韓国公開特許第10-2019-0127433号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、運転者の選択度合いに応じてドリフト制御を差分実行することを目的とする。
【0009】
本発明の解決しようとする課題は、これに限定されず、通常の技術者であれば、言及されていない他の技術的課題が以下の明細書及び図面で用いられる構成から導出できるであろう。
【課題を解決するための手段】
【0010】
本発明は、このような目的を達成するためになされたもので、ユーザカスタマイズドリフト制御方法及びユーザカスタマイズドリフト制御装置を提供する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ