TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025115624
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010184
出願日
2024-01-26
発明の名称
ロボット
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B63B
1/36 20060101AFI20250731BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】流体抵抗を低減することができるロボットを提供する。
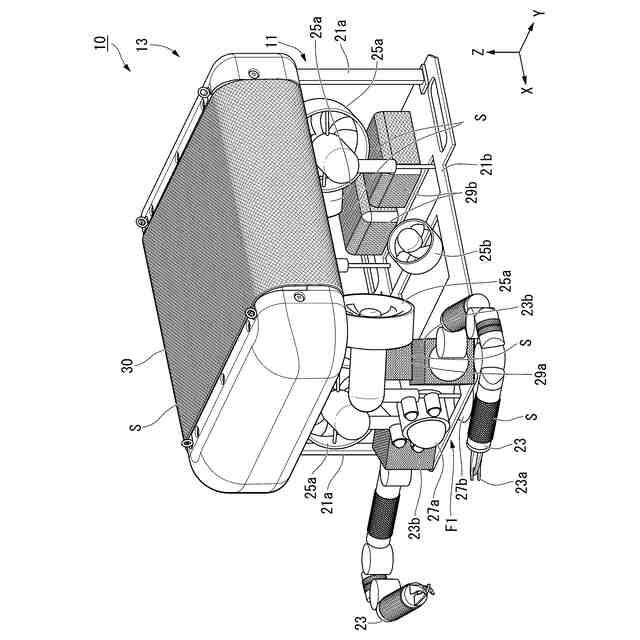
【解決手段】ロボット10は、水中動作の動力を出力するメカニカルアーム23、第1スラスター25a及び第2スラスター25bと、ディンプル41が形成された表面部Sとを備える。表面部Sの形状は、水中での相対的な水流の所定速度が、抗力係数(例えば、流体抵抗係数Cd)の変化に関する超臨界領域を示すレイノルズ数に対応するように形成された形状である。表面部Sは、第1骨格F1、各制御ユニット29a,29b、カバー部材30及びメカニカルアーム23の各々の表面を備える。
【選択図】図1
特許請求の範囲
【請求項1】
水中動作の動力を出力する動力装置と、
ディンプルが形成された表面部と
を備える
ロボット。
続きを表示(約 670 文字)
【請求項2】
前記表面部の形状は、
水中での相対的な水流の所定速度が、抗力係数の変化に関する超臨界領域を示すレイノルズ数に対応するように形成された形状である
請求項1に記載のロボット。
【請求項3】
本体部及び前記本体部から露出する露出部を備え、
前記表面部は、
前記本体部及び前記露出部の各々の表面を備える
請求項1に記載のロボット。
【請求項4】
前記露出部は、メカニカルアームである
請求項3に記載のロボット。
【請求項5】
前記表面部の形状のうち相対水流の下流側での形状は、上流側での形状に比べて、相対的により小さい前記所定速度が前記超臨界領域を示すレイノルズ数に対応するように形成された形状である
請求項2に記載のロボット。
【請求項6】
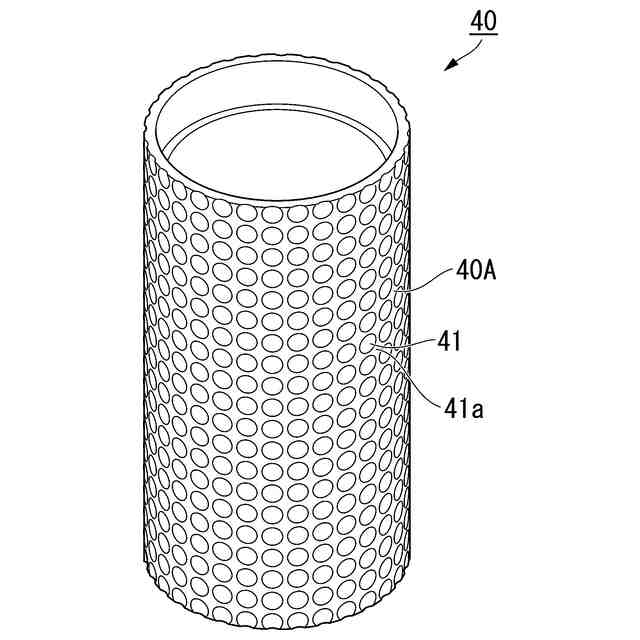
前記ディンプルを形成する周縁部の大きさ及び前記ディンプルを形成する表面の深さのうち少なくともいずれか1つは前記所定速度の大きさに応じて設定され、
前記超臨界領域を示すレイノルズ数に対応する前記所定速度が大きくなることに伴い、前記周縁部の大きさが増大傾向に変化及び前記深さが減少傾向に変化のうち、少なくともいずれか1つが設定される
請求項2に記載のロボット。
【請求項7】
浮力を発生させる浮力部を備え、
前記表面部は、
前記浮力部の表面を備える
請求項1から請求項5のいずれか1項に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、例えば、水中での低速移動、停滞及び低速水流下での稼働等が想定されて、可搬性及び運用性が重視される小型又は中型の水中ロボットが知られている。このような小型又は中型の水中ロボットに対しては、高速水流下での稼働に対応するように、例えば推進機の出力増大及び流体抵抗の低減等の改善が望まれている。
従来、例えば、物体表面に複数の突条部及び窪部を備えることによって、物体表面に接触する流体の流れ(表面流)の流速が増大する場合であっても層流化を維持して、流動抵抗を低減する構造が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2010-7846号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、例えば推進機の出力増大の場合、推進機の増設及び供給電力の増大等が必要になるという問題が生じる。また、例えば流体抵抗を低減するために機体の小型化又は形状変更等を行う場合、搭載部品のサイズ及びアーム等の露出部位の構造上又は機能上の制約に起因して、有効な改善が困難になると問題が生じる。
また、例えば、上述した従来技術の構造のように、表面流の層流化を維持する場合、境界層剥離が生じ易く、圧力抗力の増大によって、高速水流下での稼働が困難になるという問題が生じる。
【0005】
本発明は、流体抵抗を低減することができるロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決して係る目的を達成するために、本発明は以下の態様を採用した。
(1):本発明の一態様に係るロボット(例えば、実施形態でのロボット10)は、水中動作の動力を出力する動力装置(例えば、実施形態での動力装置23b、第1スラスター25a及び第2スラスター25b)と、ディンプル(例えば、実施形態でのディンプル41)が形成された表面部(例えば、実施形態での表面部S)とを備える。
【0007】
(2):上記(1)に記載のロボットでは、前記表面部の形状は、水中での相対的な水流の所定速度が、抗力係数(例えば、実施形態での流体抵抗係数Cd)の変化に関する超臨界領域を示すレイノルズ数に対応するように形成された形状であってもよい。
【0008】
(3):上記(1)に記載のロボットでは、本体部(例えば、実施形態での第1骨格F1、各制御ユニット29a,29b及びカバー部材30など)及び前記本体部から露出する露出部(例えば、実施形態でのメカニカルアーム23など)を備え、前記表面部は、前記本体部及び前記露出部の各々の表面を備えてもよい。
【0009】
(4):上記(3)に記載のロボットでは、前記露出部は、メカニカルアーム(例えば、実施形態でのメカニカルアーム23)であってもよい。
【0010】
(5):上記(2)に記載のロボットでは、前記表面部の形状のうち相対水流の下流側での形状は、上流側での形状に比べて、相対的により小さい前記所定速度が前記超臨界領域を示すレイノルズ数に対応するように形成された形状であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ