TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115886
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010586
出願日
2024-01-26
発明の名称
制御装置、制御方法及びプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05B
13/02 20060101AFI20250731BHJP(制御;調整)
要約
【課題】機体の状態変化に応じて制御ゲインを変更しつつ、機体を制御する方法を提供する。
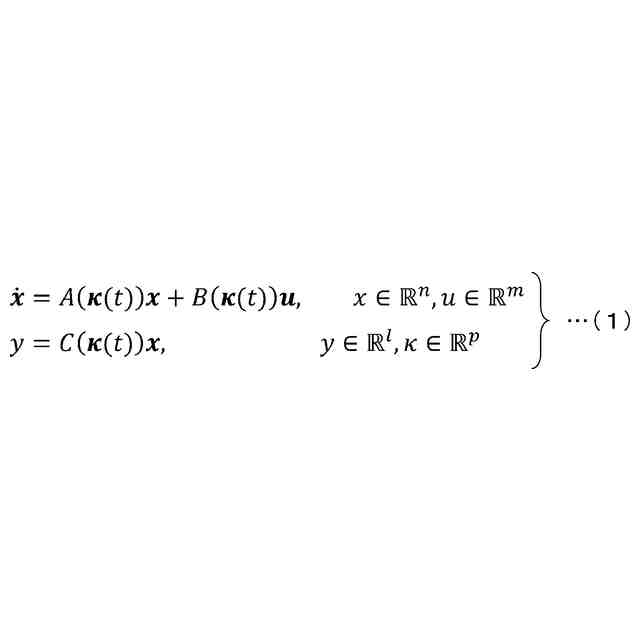
【解決手段】制御装置は、ロータの回転により飛行する機体の姿勢を制御する制御装置であって、xを前記機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPV(Linear Parameter-Varing)システムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する手段を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ロータの回転により飛行する機体の姿勢を制御する制御装置であって、
xを前記機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPV(Linear Parameter-Varing)システムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する手段、
を備える制御装置。
続きを表示(約 980 文字)
【請求項2】
前記算出する手段は、前記最小化問題において、前記評価関数を最小化することに加え、極を所定の範囲に配置することを指定し、さらに極配置のLMI(Linear Matrix Inequality)条件を制約条件とする、
請求項1に記載の制御装置。
【請求項3】
前記算出する手段は、前記状態の目標値と前記状態の差を積分する積分補償を前記状態方程式に追加した拡大系の状態方程式について、前記最小化問題を解く、
請求項1又は請求項2に記載の制御装置。
【請求項4】
前記機体に加わる外乱を考慮した運動方程式に基づく、前記外乱を打ち消すような前記機体のピッチ角速度と、前記機体のロール角速度と、前記機体のヨー角速度とを算出する補償手段、
をさらに備える請求項1又は請求項2に記載の制御装置。
【請求項5】
制御装置が実行する制御方法であって、
xをロータの回転により移動する機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPV(Linear Parameter-Varing)システムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する、
制御方法。
【請求項6】
コンピュータに、
xをロータの回転により移動する機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPV(Linear Parameter-Varing)システムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する処理、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法及びプログラムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
特許文献1には、ビークルの諸元と、外乱条件と、パラメータ変動範囲と、目標応答を設定し、ビークルの力学モデルを作成し、力学モデルに基づきLPVモデル化を行い、設定条件を逆LMI問題として定式化して、LMI設計法によりコントローラを導出し、目標応答の標準であるステップ応答を制約条件とする制御系設計アルゴリズムをLMIステップ制約サーボ系の構成で作成する制御系の設計方法が開示されている。特許文献1の設計方法では、制御ゲインを固定しているため保守的な制御になりやすい。例えば、ロータ(回転翼)により飛行する移動体の機体制御を考えた場合、ロータの回転数が変化すると、ロータの角運動量に基づくジャイロモーメントの大きさが変化するが、制御ゲインが固定されていると、ジャイロモーメント変化等の機体の状態変化に十分に対応できない。
【先行技術文献】
【特許文献】
【0003】
特開平11-110003号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
機体の状態変化に応じて制御ゲインを変更しつつ、機体を制御する方法を提供する。
【0005】
本開示は、上記課題を解決することができる制御装置、制御方法及びプログラムを提供する。
【課題を解決するための手段】
【0006】
本開示に係る制御装置は、ロータの回転により飛行する機体の姿勢を制御する制御装置であって、xを前記機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPVシステムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する手段、を備える。また、本開示に係る前記制御装置は、LQR条件の両方を含む最小化問題を解くことによりK(κ)を算出する前記算出する手段に代えて、極配置条件とLQR条件の両方を含む最小化問題を解くことによりK(κ)を算出する、前記機体システムの閉ループ系の極が指定した領域内に配置されることを保証するLMIを満たしつつ、状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する手段を備えていてもよい。
【0007】
本開示に係る制御方法は、制御装置が実行する制御方法であって、xをロータの回転により移動する機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPVシステムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する。また、本開示に係る前記制御方法は、前記K(κ)を、前記機体システムの閉ループ系の極が指定した領域内に配置されることを保証するLMIを満たしつつ、状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出してもよい。
【0008】
本開示に係るプログラムは、コンピュータに、xをロータの回転により移動する機体の状態、uを前記機体へ入力する姿勢角の指令値とする状態方程式において、前記ロータの回転数と、前記機体のピッチ角速度と、前記機体のロール角速度と、をスケジューリング変数κとして、LPVシステムを構築し、前記LPVシステムを、ゲインをK(κ)とするu=-K(κ)uによる状態フィードバック制御における前記K(κ)を、前記LPVシステムの状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出する処理、を実行させる。また、本開示に係る前記プログラムは、前記K(κ)を、前記機体システムの閉ループ系の極が指定した領域内に配置されることを保証するLMIを満たしつつ、状態と入力の二次形式で構成される評価関数を最小化する最小化問題を解くことにより算出してもよい。
【発明の効果】
【0009】
本開示の制御装置、制御方法及びプログラムによれば、機体の状態変化に応じて制御ゲインを変更しつつ、機体を制御することができる。
【図面の簡単な説明】
【0010】
実施形態に係る制御システムの一例を示す図である。
実施形態に係るシングルロータ機の一例を示す図である。
実施形態に係る記号の一例を示す図である。
実施形態に係る複素平面上のLMI領域の一例を示す第1図である。
実施形態に係る複素平面上のLMI領域の一例を示す第2図である。
実施形態に係る複素平面上のLMI領域の一例を示す第3図である。
実施形態に係る複素平面上のLMI領域の一例を示す第4図である。
実施形態に係る複素平面上のLMI領域の一例を示す第5図である。
実施形態に係るパラメータの変動範囲の一例を示す図である。
実施形態に係るスケジューリング変数とパラメータの端点番号の対応関係の一例を示す図である。
実施形態に係る要求仕様(設計パラメータ)の一例を示す図である。
実施形態に係る極配置の一例を示す第1図である。
実施形態に係る極配置の一例を示す第2図である。
実施形態に係る極配置の一例を示す第3図である。
実施形態に係る極配置の一例を示す第4図である。
実施形態に係る極配置の一例を示す第5図である。
実施形態に係る極配置の一例を示す第6図である。
実施形態に係る極配置の一例を示す第7図である。
実施形態に係る極配置の一例を示す第8図である。
実施形態に係る極配置の一例を示す第9図である。
実施形態に係る制御系の構成図である。
実施形態の制御システムのハードウェア構成の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る






 特許ウォッチ
特許ウォッチ