TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117049
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024011699
出願日
2024-01-30
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/73 20170101AFI20250804BHJP(計算;計数)
要約
【課題】自然特徴点が少ない場合においても位置計測の安定性を維持することである。
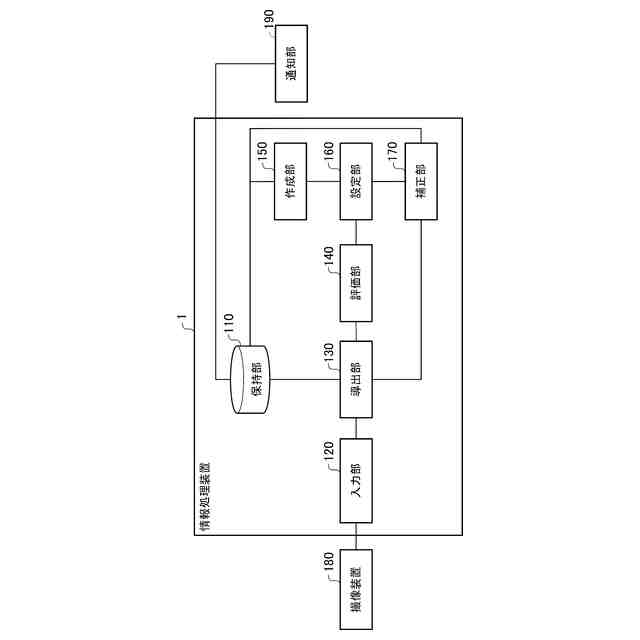
【解決手段】撮像画像及び三次元マップを用いて、撮像装置の位置を導出する導出手段と、前記導出手段が前記位置の導出に用いた情報に基づいて、前記位置の安定性を評価する評価手段と、前記撮像画像及び前記位置に基づいて、前記三次元マップを作成する作成手段と、前記評価手段が評価した結果に基づいて、保持手段が保持する三次元マップにおける予め定められた領域の拡張領域での前記撮像画像に基づいて得た、前記被写体が有する特徴の三次元位置を示す情報と、前記三次元マップにおける予め定められた領域に含まれる特徴の三次元位置を示す情報と、の信頼性を示す情報を設定する設定手段と、前記設定手段が設定した信頼性を示す情報に基づいて、前記三次元マップを補正する補正手段と、を備えることを特徴とする。
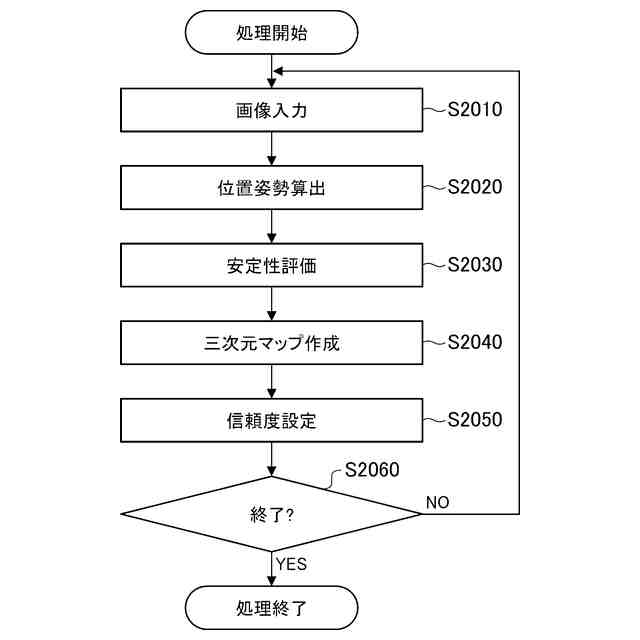
【選択図】図1
特許請求の範囲
【請求項1】
位置姿勢が可変の撮像装置から被写体の撮像画像を入力する入力手段と、
前記被写体が有する特徴の三次元位置を示す情報を含む三次元マップを保持する保持手段と、
前記撮像画像及び前記三次元マップを用いて、前記撮像装置の位置を導出する導出手段と、
前記導出手段が前記位置の導出に用いた情報に基づいて、前記位置の安定性を評価する評価手段と、
前記撮像画像及び前記位置に基づいて、前記三次元マップを作成する作成手段と、
前記評価手段が評価した結果に基づいて、前記保持手段が保持する三次元マップにおける予め定められた領域の拡張領域での前記撮像画像に基づいて得た、前記被写体が有する特徴の三次元位置を示す情報と、前記三次元マップにおける予め定められた領域に含まれる特徴の三次元位置を示す情報と、の信頼性を示す情報を設定する設定手段と、
前記設定手段が設定した信頼性を示す情報に基づいて、前記三次元マップを補正する補正手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,100 文字)
【請求項2】
前記評価手段は、前記導出手段が前記位置の導出に利用する特徴点の数が少ないほど、前記位置の安定度を低くすることを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記評価手段は、前記導出手段が前記位置の導出に利用する特徴点の撮像画像中での位置の分散が大きいほど、前記位置の安定度を低くすることを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記評価手段は、前記導出手段が前記位置の導出に利用する特徴点の奥行きの分散が大きいほど、前記位置の安定度を低くすることを特徴とする請求項1に記載の情報処理装置。
【請求項5】
前記評価手段は、前記導出手段が前記位置の導出に利用する撮像画像の輝度の変化量が大きいほど、安定度が低くすることを特徴とする請求項1に記載の情報処理装置。
【請求項6】
前記設定手段は、前記評価手段が評価した安定度が低い場合に、安定度が高い場合に比べて前記予め定められた領域に含まれる特徴の三次元位置を示す情報の信頼度を低くすることを特徴とする請求項1に記載の情報処理装置。
【請求項7】
前記設定手段は、前記評価手段が評価した安定度が高い場合に、安定度が低い場合に比べて前記予め定められた領域に含まれる特徴の三次元位置を示す情報の信頼度を高くすることを特徴とする請求項1に記載の情報処理装置。
【請求項8】
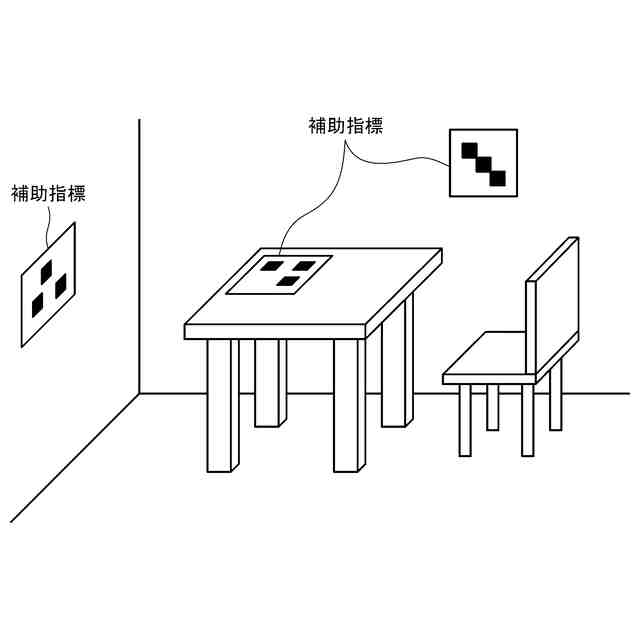
前記被写体が位置する空間には、前記撮像画像に基づいて前記撮像装置の位置を計測するための補助指標が配置されており、
前記設定手段は、前記被写体が有する特徴の三次元位置を示す情報に、前記補助指標の情報に基づく信頼度を設定する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項9】
前記三次元マップのうち事前に作成したマップに含まれる特徴を第一の特徴とし、
前記作成手段によって前記三次元マップに追加された特徴を第二の特徴とし、
前記補正手段は、前記第一の特徴の三次元位置を示す情報の更新をせず、前記第一の特徴より信頼性の低い前記第二の特徴の三次元位置を示す情報を更新する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項10】
前記三次元マップは、複数の視点のそれぞれにおける前記被写体の観測結果を示す情報を含んでおり、
前記補正手段は、前記特徴が前記三次元位置にある場合に前記視点において観測される観測結果と、前記視点において実際に観測された観測結果との誤差が小さくなるように、前記特徴の三次元位置を示す情報を更新する
ことを特徴とする、請求項9に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
画像に基づく撮像装置の位置姿勢の計測は様々な目的に利用されている。目的の一例としては、複合現実感技術/拡張現実感技術における現実空間と仮想物体との位置合わせが挙げられる。複合現実感は、Mixed Reality(MR)とも呼ばれる。拡張現実感は、Augmented Reality(AR)とも呼ばれる。目的の別の例としては、ロボットの自律移動又は自動車の自動運転のための、自己位置推定も挙げられる。
【0003】
画像に基づいて撮像装置の位置姿勢を計測する方法として、画像から検出した特徴点と、シーン中の特徴点の三次元座標を保持する三次元マップの対応関係から推定する方法が知られている。
【0004】
特許文献1では、予め位置が既知の特徴点(以下、「固定特徴点」と呼ぶ)の信頼度を高く設定して、撮像装置の位置姿勢の補正時にそれらの拘束の寄与率を大きくして三次元マップを補正することにより、高精度な位置姿勢計測を実現しようとしている。
【先行技術文献】
【特許文献】
【0005】
特開2020-13560号公報
【非特許文献】
【0006】
Raul Mur-Artal et.al, ORB-SLAM:A Versatile and Accurate Monocular SLAM System. IEEE Transactions on Robotics
C.Forster, M.Pizzoli,and D.Scaramuzza, SVO:fast semi-direct monocular visual odometry, Proc. 2014 IEEE International Conference on Robotics and Automation(ICRA), pp.15-22, 2014.
Z.Zhang, A flexible new technique for camera calibration, IEEE Trans. on Pattern Analysis and Machine Intelligence, vol.2, no.11, pp.1330-1334, 2000.
H.Kato, M.Billinghurst, I.Poupyrev, K.Imamoto,and K.Tachibana, Virtual object manipulation on a table-top AR environment, Proc. IEEE and ACM International Symposium on Augmented Reality 2000, pp.111-119, 2000.
J.Engel, T.Schoeps, and D.Cremers, LSD-SLAM: Large-scale direct monocular SLAM, Proc. 14th European Conference on Computer Vision(ECCV), pp.834-849, 2014.
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1で開示される方法では、固定特徴点以外の特徴点(以下、「自然特徴点」と呼ぶ)が少ない場合に、位置計測の安定性が低下する場合がある。
【0008】
本発明は、自然特徴点が少ない場合においても位置計測の安定性を維持することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一実施形態の情報処理装置は、位置姿勢が可変の撮像装置から被写体の撮像画像を入力する入力手段と、前記被写体が有する特徴の三次元位置を示す情報を含む三次元マップを保持する保持手段と、前記撮像画像及び前記三次元マップを用いて、前記撮像装置の位置を導出する導出手段と、前記導出手段が前記位置の導出に用いた情報に基づいて、前記位置の安定性を評価する評価手段と、前記撮像画像及び前記位置に基づいて、前記三次元マップを作成する作成手段と、前記評価手段が評価した結果に基づいて、前記保持手段が保持する三次元マップにおける予め定められた領域の拡張領域での前記撮像画像に基づいて得た、前記被写体が有する特徴の三次元位置を示す情報と、前記三次元マップにおける予め定められた領域に含まれる特徴の三次元位置を示す情報と、の信頼性を示す情報を設定する設定手段と、前記設定手段が設定した信頼性を示す情報に基づいて、前記三次元マップを補正する補正手段と、を備えることを特徴とする。
【発明の効果】
【0010】
本発明によれば、自然特徴点が少ない場合においても位置計測の安定性を維持することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ