TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117732
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012613
出願日
2024-01-31
発明の名称
作業機械制御装置、作業機械、作業機械用外部装置、作業機械システムおよび位置補正方法
出願人
コベルコ建機株式会社
代理人
弁理士法人三協国際特許事務所
主分類
E02F
9/26 20060101AFI20250805BHJP(水工;基礎;土砂の移送)
要約
【課題】機械本体に対する相対位置を変えることが可能な可動部に現場情報取得器が取り付けられる場合、コントローラは、現場情報取得器により取得される作業現場の情報を用いた作業機械の制御を適切に行うことができない。
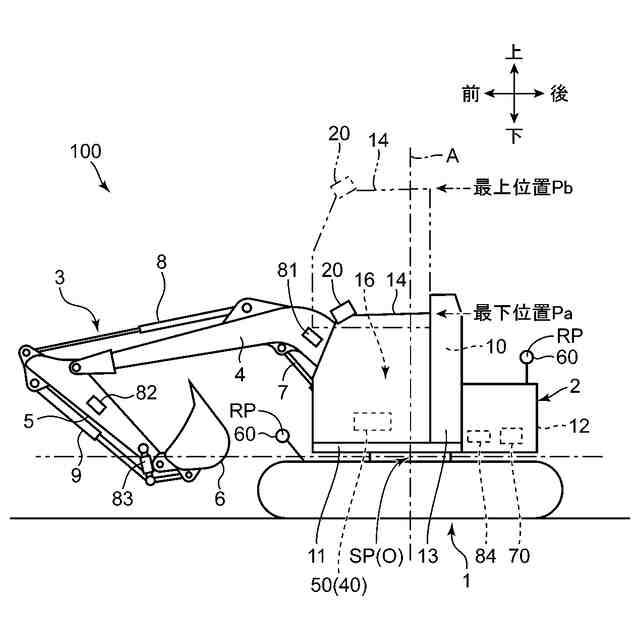
【解決手段】作業機械100は、機械本体と、機械本体に対する相対位置を変えることが可能な可動部14と、可動部14に取り付けられ、作業現場の情報を取得する現場情報取得器20と、を備える。作業機械制御装置40は、可動部14が第1の位置Paに配置されるときの現場情報取得器20の位置に相関する第1の位置情報と、可動部14が第1の位置Paとは異なる第2の位置Pxに配置されるときの現場情報取得器20の位置に相関する第2の位置情報と、を用いて、現場情報取得器20の位置についての補正を行うコントローラ50を備える。
【選択図】図5
特許請求の範囲
【請求項1】
機械本体と、前記機械本体に対する相対位置を変えることが可能な可動部と、前記可動部に取り付けられ、作業現場の情報である作業現場情報を取得する現場情報取得器と、を備える作業機械を制御するための作業機械制御装置であって、
前記可動部が第1の位置に配置されるときの前記現場情報取得器の位置に相関する第1の位置情報と、前記可動部が前記第1の位置とは異なる第2の位置に配置されるときの前記現場情報取得器の位置に相関する第2の位置情報と、を用いて、前記現場情報取得器の位置についての補正を行うコントローラを備える作業機械制御装置。
続きを表示(約 1,000 文字)
【請求項2】
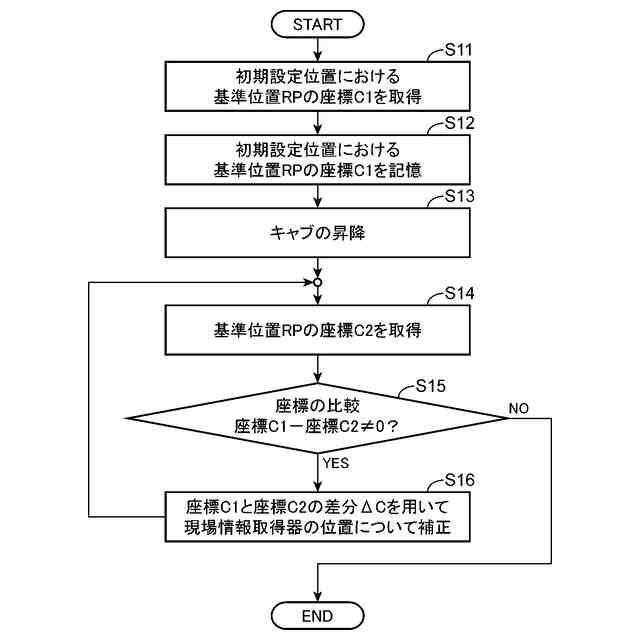
前記コントローラは、前記可動部が前記第1の位置に配置されるときに前記現場情報取得器が取得する前記作業現場情報を用いて基準位置の座標である第1の座標を前記第1の位置情報として特定し、前記可動部が前記第2の位置に配置されるときに前記現場情報取得器が取得する前記作業現場情報を用いて前記基準位置の座標である第2の座標を前記第2の位置情報として特定するように構成される、請求項1に記載の作業機械制御装置。
【請求項3】
前記コントローラは、前記第1の座標と前記第2の座標との差分を用いて前記現場情報取得器の位置についての補正を行う、請求項2に記載の作業機械制御装置。
【請求項4】
前記基準位置は、前記作業現場に配置される物体である基準物体の位置、前記機械本体における所定の位置、または、前記機械本体に支持される物体である基準物体の位置である、請求項2に記載の作業機械制御装置。
【請求項5】
前記現場情報取得器は、前記作業現場の三次元位置情報を取得することが可能な三次元位置情報取得器であり、
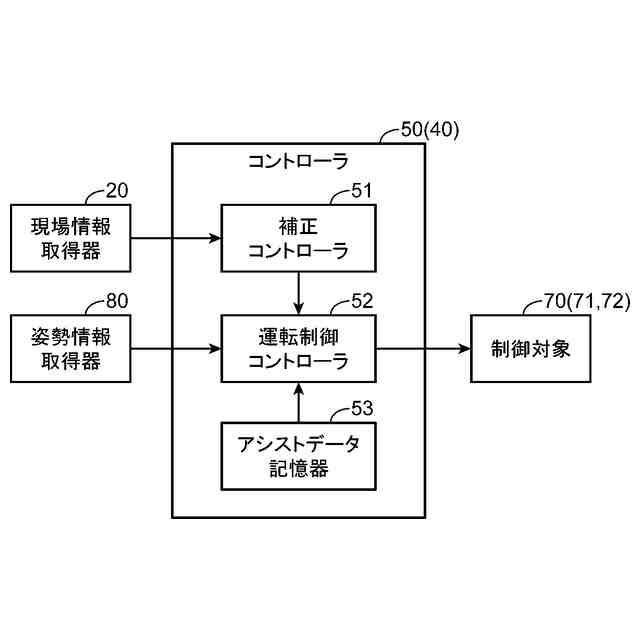
前記コントローラは、前記三次元位置情報取得器から入力される前記三次元位置情報を用いて前記作業機械の動作の制御であって作業関係者をアシストするためのアシスト制御を行う、請求項2に記載の作業機械制御装置。
【請求項6】
前記可動部は、前記機械本体に対して昇降可能なキャブである、請求項1に記載の作業機械制御装置。
【請求項7】
前記可動部は、前記機械本体に対して昇降可能なキャブである、請求項2に記載の作業機械制御装置。
【請求項8】
前記可動部は、前記機械本体に対して回動可能なキャブである、請求項1に記載の作業機械制御装置。
【請求項9】
前記コントローラは、前記可動部が前記第1の位置に配置されるときの前記作業現場の地面に関する情報である第1の基準面情報と、前記可動部が前記第2の位置に配置されるときの前記作業現場の地面に関する情報である第2の基準面情報と、を用いて、前記現場情報取得器の角度についての補正を行う、請求項8に記載の作業機械制御装置。
【請求項10】
前記可動部は、前記機械本体に対して回動可能な作業装置である、請求項1に記載の作業機械制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、油圧ショベルなどの作業機械のための技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
一般に、油圧ショベルなどの作業機械は、下部走行体と、下部走行体に旋回可能に支持される上部旋回体と、上部旋回体に回動可能に支持される作業装置と、を備える。作業装置は、例えば、ブームと、アームと、バケットなどの先端アタッチメントと、を含む。上部旋回体は、旋回フレームと、旋回フレームに支持されるキャブと、を含む。キャブには、操作レバーなどの操作装置が配置され、作業機械は、オペレータが操作装置に与える操作に応じた動作を行う。
【先行技術文献】
【特許文献】
【0003】
特開2014-141837号公報
特開2016-176288号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、例えば作業機械の動作を自動化する自動運転の制御のようにオペレータなどの作業関係者をアシストするためのアシスト制御が行われる場合には、作業現場における作業対象の情報を取得するために、例えばLiDARなどの現場情報取得器が作業機械に取り付けられる場合がある。しかしながら、機械本体に対して昇降可能なキャブ(例えば特許文献1および特許文献2参照)のように機械本体に対する相対位置を変えることが可能な可動部に現場情報取得器が取り付けられる場合、コントローラは、現場情報取得器により取得される作業現場の情報を用いた作業機械の制御を適切に行うことができないことがある。
【0005】
本開示は、機械本体に対する相対位置を変えることが可能な可動部に現場情報取得器が取り付けられる場合であっても、当該現場情報取得器により取得される作業現場の情報を用いた作業機械の制御を適切に行うことができる作業機械制御装置、作業機械、作業機械用外部装置、作業機械システムおよび位置補正方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1の態様に係る作業機械制御装置は、機械本体と、前記機械本体に対する相対位置を変えることが可能な可動部と、前記可動部に取り付けられ、作業現場の情報である作業現場情報を取得する現場情報取得器と、を備える作業機械を制御するための作業機械制御装置であって、前記可動部が第1の位置に配置されるときの前記現場情報取得器の位置に相関する第1の位置情報と、前記可動部が前記第1の位置とは異なる第2の位置に配置されるときの前記現場情報取得器の位置に相関する第2の位置情報と、を用いて、前記現場情報取得器の位置についての補正を行うコントローラを備える。
【0007】
この第1の態様に係る作業機械制御装置では、可動部が機械本体に対して変位することに伴って可動部に取り付けられた現場情報取得器と作業現場における作業対象との相対位置が変わる場合であっても、コントローラが第1の位置情報と第2の位置情報とを用いて現場情報取得器の位置についての補正を行うので、現場情報取得器により取得される作業現場情報を用いた作業機械の制御が適切に行われる。
【0008】
第2の態様は、第1の態様に係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第2の態様に係る作業機械制御装置では、前記コントローラは、前記可動部が前記第1の位置に配置されるときに前記現場情報取得器が取得する前記作業現場情報を用いて基準位置の座標である第1の座標を前記第1の位置情報として特定し、前記可動部が前記第2の位置に配置されるときに前記現場情報取得器が取得する前記作業現場情報を用いて前記基準位置の座標である第2の座標を前記第2の位置情報として特定するように構成されることが好ましい。この第2の態様では、前記可動部が前記第1の位置および前記第2の位置のそれぞれに配置されるときに前記現場情報取得器が取得する前記作業現場情報を用いて前記第1の位置情報および前記第2の位置情報の取得が可能になる。
【0009】
第3の態様は、第2の態様に係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第3の態様に係る作業機械制御装置では、前記コントローラは、前記第1の座標と前記第2の座標との差分を用いて前記現場情報取得器の位置についての補正を行うことが好ましい。
【0010】
第4の態様は、第2または第3の態様に係る作業機械制御装置においてさらに次の構成を備えることが好ましい。すなわち、第4の態様に係る作業機械制御装置では、前記基準位置は、前記作業現場に配置される物体である基準物体の位置、前記機械本体における所定の位置、または、前記機械本体に支持される物体である基準物体の位置であることが好ましい。前記基準物体が前記作業現場に配置される場合、前記基準物体は、前記作業現場の地面よりも高い位置に配置されることがより好ましい。この第4の態様では、前記現場情報取得器の位置についての補正を行うための前記基準位置を容易に設定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る







 特許ウォッチ
特許ウォッチ