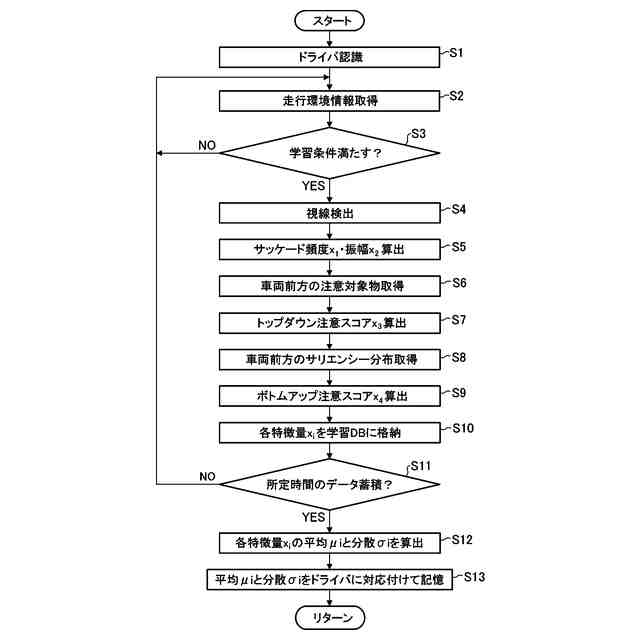
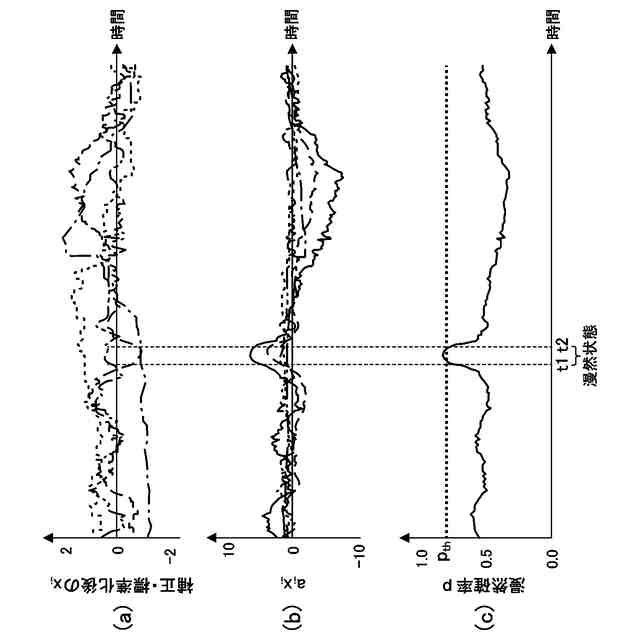
公開番号2025120574 公報種別公開特許公報(A) 公開日2025-08-18 出願番号2024015449 出願日2024-02-05 発明の名称ドライバ状態推定装置 出願人マツダ株式会社 代理人個人,個人,個人,個人,個人 主分類B60W 40/08 20120101AFI20250808BHJP(車両一般) 要約【課題】ドライバが漫然状態であることを、疾患等の他の異常状態と区別して推定することが可能な、ドライバ状態推定装置を提供する。 【解決手段】ドライバ状態推定装置(100)は、走行環境情報とドライバの視線とに基づきドライバ状態を推定するコントローラ(10)を備え、コントローラは、個人学習を実行する条件が満たされている場合に、走行環境情報とドライバの視線とに基づき、ドライバの状態に応じて変化する探索行動の複数の指標について各々の特徴量xiの所定時間における平均値μi及び分散σiを算出し、ドライバの状態を推定する条件が満たされている場合に取得された特徴量xiの各々を、予め算出された平均値μi及び分散σiにより標準化し、標準化した特徴量xiと、特徴量xiの各々について予め設定された重み係数aiと、予め設定された定数a0とを用いて、シグモイド関数によりドライバが漫然状態である確率を表す漫然確率pを算出する。 【選択図】図4 特許請求の範囲【請求項1】 車両を運転するドライバの状態を推定するドライバ状態推定装置であって、 前記車両の走行環境情報を取得する走行環境情報取得装置と、 前記ドライバの視線を検出する視線検出装置と、 前記走行環境情報と前記ドライバの視線とに基づき、前記ドライバが漫然状態か否かを推定するように構成されたコントローラと、を備え、 前記コントローラは、 個人学習を実行する条件が満たされている場合に、前記走行環境情報と前記ドライバの視線とに基づき、前記ドライバの状態に応じて変化する探索行動の複数の指標について、各々の特徴量x i (i=1,...,n)を所定時間にわたって取得し、 前記所定時間にわたって取得した前記特徴量x i の各々の平均値μ i 及び分散σ i を算出するように構成され、 前記コントローラは、 前記ドライバの状態を推定する条件が満たされている場合に、前記走行環境情報と前記ドライバの視線とに基づき、前記特徴量x i を取得し、 取得した前記特徴量x i の各々を、前記ドライバについて予め算出された前記平均値μ i 及び分散σ i により標準化し、 標準化した前記特徴量x i と、前記特徴量x i の各々について予め設定された重み係数a i と、予め設定された定数a 0 とを用いて、以下の式により前記ドライバが漫然状態である確率を表す漫然確率pを算出し、 TIFF 2025120574000004.tif 20 76 算出した前記漫然確率pが所定値以上である状態が所定時間以上継続した場合、前記ドライバが漫然状態であると推定するように構成されている、 ドライバ状態推定装置。 続きを表示(約 770 文字)【請求項2】 前記コントローラは、前記ドライバの状態を推定する条件が満たされている場合に取得した前記特徴量x i の各々を、前記走行環境情報に基づき補正し、補正した前記特徴量x i の各々を、前記平均値μ i 及び分散σ i により標準化するように構成されている、請求項1に記載のドライバ状態推定装置。 【請求項3】 前記コントローラは、前記走行環境情報に基づき、前記車両が走行している道路の勾配を取得し、前記勾配が大きいほど、前記ドライバが漫然状態であると推定され難くなる方向に前記特徴量x i を補正するように構成されている、請求項2に記載のドライバ状態推定装置。 【請求項4】 前記コントローラは、前記走行環境情報に基づき、前記車両が走行している道路の曲率を取得し、前記曲率が大きいほど、前記ドライバが漫然状態であると推定され難くなる方向に前記特徴量x i を補正するように構成されている、請求項2に記載のドライバ状態推定装置。 【請求項5】 前記コントローラは、前記走行環境情報に基づき、前記車両の外部の照度を取得し、前記照度が低いほど、前記ドライバが漫然状態であると推定され難くなる方向に前記特徴量x i を補正するように構成されている、請求項2に記載のドライバ状態推定装置。 【請求項6】 前記コントローラは、前記走行環境情報に基づき、前記車両の速度を取得し、前記速度が高いほど、前記ドライバが漫然状態であると推定され難くなる方向に前記特徴量x i を補正するように構成されている、請求項2に記載のドライバ状態推定装置。
発明の詳細な説明【技術分野】 【0001】 本発明は、車両を運転するドライバの状態を推定するドライバ状態推定装置に関する。 続きを表示(約 2,500 文字)【背景技術】 【0002】 交通事故の主な原因のひとつとして、運転に対するドライバの集中が欠けている状態、いわゆる漫然状態が挙げられる。従来、漫然状態を検出する技術としては、ドライバの視線が動くときに生じる急激な眼球運動であるサッケードの振幅あたりの移動速度や持続時間が、意識のわき見のときと正常に前方を視認しているときとで相違する、という知見に着目した技術(例えば、特許文献1参照)等が提案されている。 【先行技術文献】 【特許文献】 【0003】 特開2017-224066号公報 【発明の概要】 【発明が解決しようとする課題】 【0004】 しかしながら、上述したような従来の技術では、ドライバが漫然状態ではない場合においても、疾患や加齢等によりドライバの視線の動きの頻度や変化量が変化した場合に、ドライバが漫然状態にあると推定してしまう可能性がある。即ち、従来の技術では、ドライバが漫然状態であることを、疾患等の他の異常状態と区別して正確に推定することが難しい。 【0005】 本発明は、このような問題を解決するためになされたものであり、ドライバが漫然状態であることを、疾患等の他の異常状態と区別して推定することが可能な、ドライバ状態推定装置を提供することを目的としている。 【課題を解決するための手段】 【0006】 上述した課題を解決するために、本発明は、車両を運転するドライバの状態を推定するドライバ状態推定装置であって、車両の走行環境情報を取得する走行環境情報取得装置と、ドライバの視線を検出する視線検出装置と、走行環境情報とドライバの視線とに基づき、ドライバが漫然状態か否かを推定するように構成されたコントローラと、を備え、コントローラは、個人学習を実行する条件が満たされている場合に、走行環境情報とドライバの視線とに基づき、ドライバの状態に応じて変化する探索行動の複数の指標について、各々の特徴量x i (i=1,...,n)を所定時間にわたって取得し、所定時間にわたって取得した特徴量x i の各々の平均値μ i 及び分散σ i を算出するように構成され、コントローラは、ドライバの状態を推定する条件が満たされている場合に、走行環境情報とドライバの視線とに基づき、特徴量x i を取得し、取得した特徴量x i の各々を、ドライバについて予め算出された平均値μ i 及び分散σ i により標準化し、標準化した特徴量x i と、特徴量x i の各々について予め設定された重み係数a i と、予め設定された定数a 0 とを用いて、以下の式によりドライバが漫然状態である確率を表す漫然確率pを算出し、 TIFF 2025120574000002.tif 20 76 算出した漫然確率pが所定値以上である状態が所定時間以上継続した場合、ドライバが漫然状態であると推定するように構成されている。 【0007】 このように構成された本発明によれば、コントローラは、個人学習を実行する条件が満たされている場合に、ドライバの状態に応じて変化する探索行動の複数の指標について、所定時間にわたって取得した特徴量x i の各々の平均値μ i 及び分散σ i を算出し、ドライバの状態を推定する条件が満たされている場合に、特徴量x i を取得し、取得した特徴量x i の各々を、予め算出された平均値μ i 及び分散σ i により標準化し、標準化した特徴量x i と、特徴量x i の各々について予め設定された重み係数a i と、予め設定された定数a 0 とを用いて、シグモイド関数により漫然確率pを算出するので、ドライバの探索行動のいずれかの指標だけに着目するのではなく、複数の指標の各特徴量におけるドライバが漫然状態であるとき特有の変化を総合的に捉えて、ドライバが漫然状態である確率を定量的に評価することにより、ドライバの疾患や加齢等による各特徴量の変化とは区別して漫然状態を推定することができる。また、予めドライバ毎に個人学習を行い、特徴量x i を標準化することにより、ドライバの探索行動の個人差による影響を除外して、ドライバの漫然状態をより正確に推定することができる。 【0008】 本発明において、好ましくは、コントローラは、ドライバの状態を推定する条件が満たされている場合に取得した特徴量x i の各々を、走行環境情報に基づき補正し、補正した特徴量x i の各々を、平均値μ i 及び分散σ i により標準化するように構成されている。 【0009】 このように構成された本発明によれば、コントローラは、取得した特徴量x i の各々を、走行環境情報に基づき補正するので、車両の走行環境による影響を打ち消すように特徴量x i を補正し、漫然確率pをより正確に算出することができ、走行環境に起因するドライバ状態の誤推定を防止することができる。 【0010】 本発明において、好ましくは、コントローラは、走行環境情報に基づき、車両が走行している道路の勾配を取得し、勾配が大きいほど、ドライバが漫然状態であると推定され難くなる方向に特徴量x i を補正するように構成されている。 (【0011】以降は省略されています) この特許をJ-PlatPat(特許庁公式サイト)で参照する








 特許ウォッチ
特許ウォッチ