TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025120796
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015897
出願日
2024-02-05
発明の名称
実装システム、及び実装方法
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人北斗特許事務所
主分類
H05K
13/04 20060101AFI20250808BHJP(他に分類されない電気技術)
要約
【課題】生産性が低下することを抑制する実装システム、及び実装方法を提供すること。
【解決手段】実装システムA1は、フィーダ7と、実装ヘッド2と、撮像部3と、検出部42と、判定部43と、を備える。フィーダ7は、凹部に収容されている部品100を供給する。実装ヘッド2は、フィーダ7により供給された部品100を保持し、基板200に実装する。撮像部3は、実装ヘッド2により基板200に実装される部品100である対象部品X1を保持する前に、対象部品X1を収容している凹部141を撮像する。検出部42は、撮像部3が撮像して得られた画像に基づいて、対象部品X1の姿勢に係る異常を検出する。判定部43は、検出部42が異常を検出した場合に、対象部品X1を実装ヘッド2に保持させるか否かを判定する。
【選択図】図2
特許請求の範囲
【請求項1】
凹部に収容されている部品を供給するフィーダと、
前記フィーダにより供給された前記部品を保持し、基板に実装する実装ヘッドと、
前記実装ヘッドにより基板に実装される前記部品である対象部品を保持する前に、前記対象部品を収容している凹部を撮像する撮像部と、
前記撮像部が撮像して得られた画像に基づいて、前記対象部品の姿勢に係る異常を検出する検出部と、
前記検出部が前記異常を検出した場合に、前記対象部品を前記実装ヘッドに保持させるか否かを判定する判定部と、を備える、
実装システム。
続きを表示(約 1,600 文字)
【請求項2】
前記異常は、前記対象部品とは異なる部品である余剰部品が前記画像に含まれていることを含み、
前記実装ヘッドは、前記部品を捕捉可能な捕捉部を有し、
前記判定部は、前記捕捉部と前記余剰部品とが干渉しないときに、前記対象部品を前記実装ヘッドに保持させると判定する、
請求項1に記載の実装システム。
【請求項3】
前記部品は、前記実装ヘッドに保持される保持面を有し、
前記異常は、前記対象部品の前記保持面が、前記対象部品を収容する凹部が設けられている供給面と交差していることを含み、
前記判定部は、前記供給面の面方向から見て前記対象部品の前記保持面と前記供給面とがなす角度が、前記実装ヘッドが前記部品を保持することができる許容範囲であるときに、前記対象部品を前記実装ヘッドに保持させると判定する、
請求項1に記載の実装システム。
【請求項4】
前記部品は、前記基板の導体と電気的に接続される複数の電極部を有し、
前記判定部は、前記画像に含まれる前記対象部品における前記複数の電極部の各々が占める領域の面積に基づいて、前記角度が許容範囲内であるか否かを判定する、
請求項3に記載の実装システム。
【請求項5】
前記部品は、前記基板の導体と電気的に接続される複数の電極部を有し、
前記撮像部は、複数であり、
前記複数の前記撮像部は、互いに異なる角度から前記対象部品を収容する凹部を撮像し、
前記判定部は、
前記複数の前記撮像部が撮像して得られた複数の画像に基づいて、前記供給面を基準とする、前記画像に含まれる前記複数の電極部の各々における高さに関する高さ情報を取得し、
前記高さ情報を用いて、前記角度が前記許容範囲内であるか否かを判定する、
請求項3に記載の実装システム。
【請求項6】
前記検出部は、
前記画像に含まれる前記部品の特徴部分を抽出し、
前記特徴部分の個数と、事前に前記部品に紐づけて設定される設定数と、を比較し、
前記個数と前記設定数とが異なる場合に、前記異常を検出する、
請求項1に記載の実装システム。
【請求項7】
前記検出部は、
前記画像に含まれる前記部品の特徴部分を抽出し、
前記特徴部分が占める領域の面積に基づいて、前記異常を検出する、
請求項1に記載の実装システム。
【請求項8】
前記画像から前記部品の特徴部分を抽出するためのアルゴリズムを部品の品種毎に指定する指定情報を記憶する記憶部を更に備え、
前記検出部は、前記指定情報と、前記対象部品の品種を示す情報と、に基づいて、前記対象部品に適した前記アルゴリズムを使用して、前記特徴部分を抽出する、
請求項6又は7に記載の実装システム。
【請求項9】
前記部品は、前記基板の導体と電気的に接続される複数の電極部と、前記複数の電極部とは異なる部分である胴体部と、を有し、
前記特徴部分は、前記複数の電極部及び前記胴体部の少なくとも一方である、
請求項6又は7に記載の実装システム。
【請求項10】
前記部品は、前記基板の導体と電気的に接続される複数の電極部を有し、
前記撮像部は、複数であり、
前記複数の前記撮像部は、互いに異なる角度から前記対象部品を収容する凹部を撮像し、
前記検出部は、
前記複数の前記撮像部の各々が撮像して得られた画像に基づいて、前記対象部品を収容する凹部が設けられている供給面を基準とする、前記画像に含まれる前記複数の電極部の各々における高さに関する高さ情報を取得し、
前記高さ情報を用いて、前記異常を検出する、
請求項1に記載の実装システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、一般に実装システム、及び実装方法に関し、より詳細には、基板に部品を実装するための実装システム、及び実装方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、部品収納テープを用いて部品を部品供給位置に供給する部品供給装置と、吸着ノズルが昇降可能に設けられたヘッドユニットと、部品供給位置に供給された部品を撮像する第1撮像部と、部品供給位置に供給された部品の姿勢を判定する部品姿勢判定部と、を備える部品実装装置が開示されている。部品姿勢判定部は、第1撮像部により撮像された撮像画像に基づき、部品収納テープにおいて部品が、部品収納部から上下方向と交差する水平面上の方向へはみ出す異常姿勢を取っているか否かを判定する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2018/225151号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の部品実装装置(実装システム)は、部品を吸着(保持)する前に供給された部品の姿勢に関する異常を検出し、異常を検出した部品を吸着しないため、異常を検出した部品を吸着するためにヘッドユニットが移動する時間を短縮することができる。しかし、部品の吸着及び実装に問題がない程度の異常が検出された場合でも、上記の異常を検出した部品が吸着されず実装されないため、生産性が低下してしまう可能性がある。
【0005】
本開示の目的とするところは、生産性が低下することを抑制する実装システム、及び実装方法を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一態様に係る実装システムは、フィーダと、実装ヘッドと、撮像部と、検出部と、判定部と、を備える。前記フィーダは、凹部に収容されている部品を供給する。前記実装ヘッドは、前記フィーダにより供給された前記部品を保持し、基板に実装する。前記撮像部は、前記実装ヘッドにより基板に実装される前記部品である対象部品を保持する前に、前記対象部品を収容している凹部を撮像する。前記検出部は、前記撮像部が撮像して得られた画像に基づいて、前記対象部品の姿勢に係る異常を検出する。前記判定部は、前記検出部が前記異常を検出した場合に、前記対象部品を前記実装ヘッドに保持させるか否かを判定する。
【0007】
本開示の一態様に係る実装方法は、撮像ステップと、検出ステップと、判定ステップと、を含む。前記撮像ステップでは、前記実装ヘッドにより基板に実装される前記部品である対象部品を保持する前に、前記対象部品を収容している凹部を撮像する。前記検出ステップでは、前記撮像ステップにて撮像して得られた画像に基づいて、前記対象部品の姿勢に係る異常を検出する。前記判定ステップでは、前記検出ステップにて前記異常を検出した場合に、前記対象部品を前記実装ヘッドに保持させるか否かを判定する。
【発明の効果】
【0008】
本開示によれば、生産性が低下することを抑制するという利点がある。
【図面の簡単な説明】
【0009】
図1は、本実施形態に係る実装装置の概略構成図である。
図2は、同上の実装システムのブロック図である。
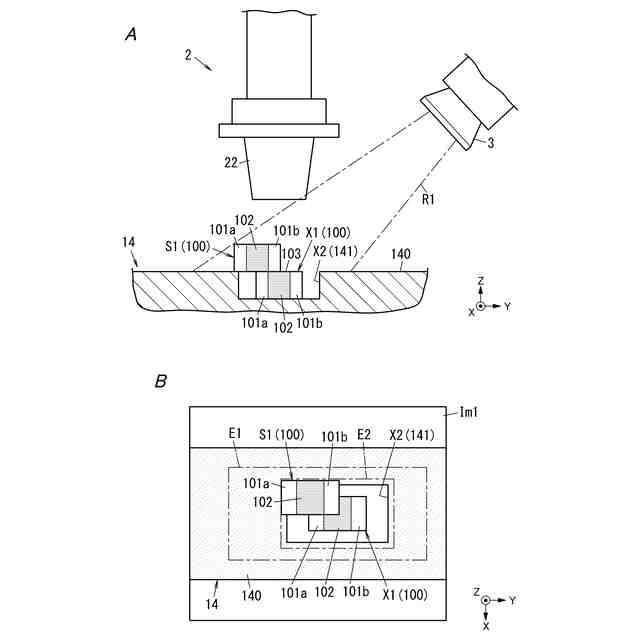
図3Aは、対象部品の姿勢が正常である場合に、同上の実装装置における撮像部が対象凹部を撮像する様子を説明する模式図である。図3Bは、対象部品の姿勢が正常である場合に、同上の実装装置における撮像部が撮像して得られた画像を表す模式図である。
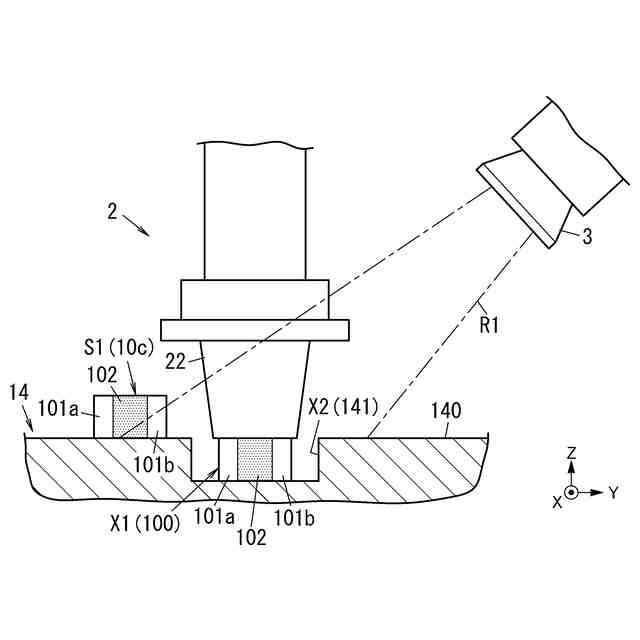
図4は、対象部品の姿勢が正常である場合に、同上の実装装置における捕捉部が対象部品を捕捉する様子を説明する模式図である。
図5Aは、余剰部品があり、かつ、対象部品を保持できない場合に、同上の実装装置における撮像部が対象凹部を撮像する様子を説明する模式図である。図5Bは、余剰部品があり、かつ、対象部品を保持できない場合に、同上の実装装置における撮像部が撮像して得られた画像を表す模式図である。
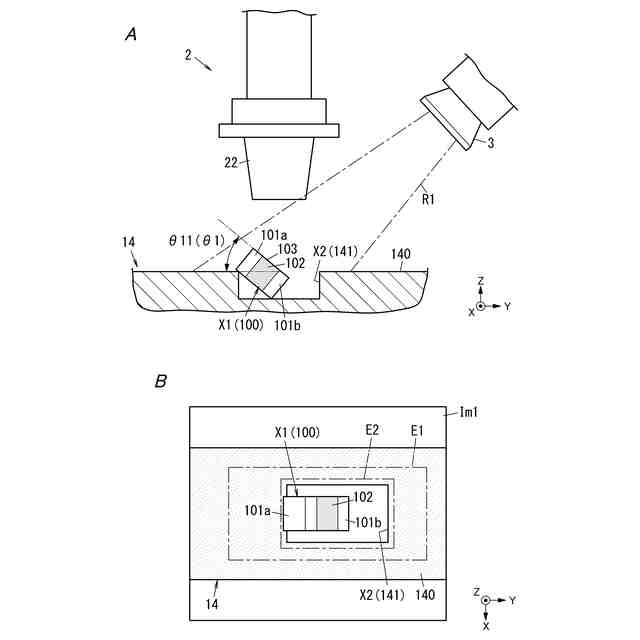
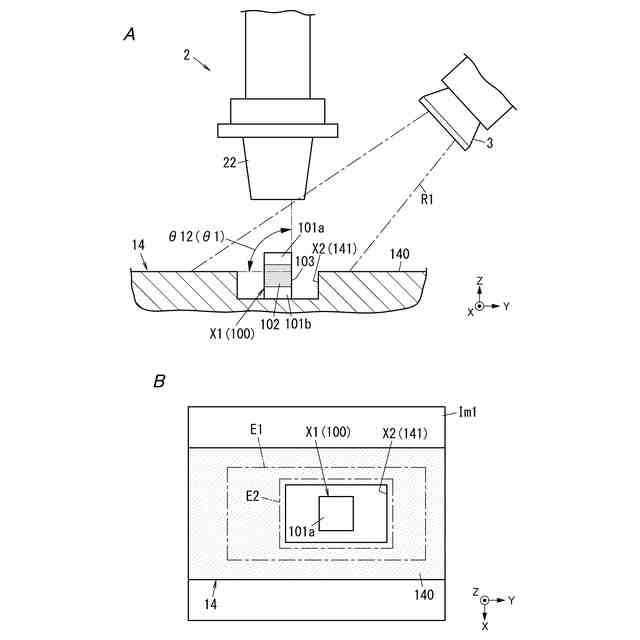
図6Aは、対象部品が部品立ちしており、かつ、対象部品を保持できない場合に、同上の実装装置における撮像部が対象凹部を撮像する様子を説明する模式図である。図6Bは、対象部品が部品立ちしており、かつ、対象部品を保持できない場合に、同上の実装装置における撮像部が撮像して得られた画像を表す模式図である。
図7Aは、対象部品が部品立ちしており、かつ、対象部品を保持できない場合に、同上の実装装置における撮像部が対象凹部を撮像する様子を説明する、図6Aとは異なる模式図である。図7Bは、対象部品が部品立ちしており、かつ、対象部品を保持できない場合に、同上の実装装置における撮像部が撮像して得られた画像を表す、図6Bとは異なる模式図である。
図8Aは、余剰部品があるが、対象部品を保持できる場合に、同上の実装装置における撮像部が対象凹部を撮像する様子を説明する模式図である。図8Bは、余剰部品があるが、対象部品を保持できる場合に、同上の実装装置における撮像部が撮像して得られた画像を表す模式図である。
図9は、余剰部品があるが、対象部品を保持できる場合に、同上の実装装置における捕捉部が対象部品を捕捉する様子を説明する模式図である。
図10Aは、対象部品が部品立ちしているが、対象部品を保持できる場合に、同上の実装装置における撮像部が対象凹部を撮像する様子を説明する模式図である。図10Bは、対象部品が部品立ちしているが、対象部品を保持できる場合に、同上の実装装置における撮像部が撮像して得られた画像を表す模式図である。
図11は、同上の実装方法を示すフローチャートである。
図12は、同上の変形例に係る実装装置において、複数の撮像部が対象凹部を撮像する様子を説明する模式図である。
【発明を実施するための形態】
【0010】
以下に説明する実施形態及び変形例は、本開示の一例に過ぎない。本開示は、実施形態及び変形例に限定されることなく、この実施形態及び変形例以外であっても、本開示に係る技術的思想を逸脱しない範囲であれば、設計等に応じて種々の変更が可能である。下記の実施形態及び変形例において説明する各図は模式的な図であり、図中の各構成要素の大きさ及び厚さそれぞれの比が必ずしも実際の寸法比を反映しているとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る






 特許ウォッチ
特許ウォッチ