TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025126068
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024022446
出願日
2024-02-16
発明の名称
液体塗布装置、液体塗布方法およびプログラム
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
B41J
2/01 20060101AFI20250821BHJP(印刷;線画機;タイプライター;スタンプ)
要約
【課題】高画質なつなぎ目品質(画像間のつなぎ段差が少ない品質)を実現する。
【解決手段】液体塗布領域を複数に分割した各分割領域に順次移動し、複数の画像をつなげて液体塗布する液体塗布装置において、前記分割領域の端部に対向する位置に配置され、前記分割領域の端部同士が重なり合う領域に設定された基準位置を撮像する撮像装置と、前記撮像装置で撮像した基準位置を、画像書き出しの基準原点とする画像つなぎ計測部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
液体塗布領域を複数に分割した各分割領域に順次移動し、複数の画像をつなげて液体塗布する液体塗布装置において、
前記分割領域の端部に対向する位置に配置され、前記分割領域の端部同士が重なり合う領域に設定された基準位置を撮像する撮像装置と、
前記撮像装置で撮像した基準位置を、画像書き出しの基準原点とする画像つなぎ計測部と、
を備えることを特徴とする液体塗布装置。
続きを表示(約 830 文字)
【請求項2】
前記分割領域の端部は、液体吐出ヘッドのヘッド稼働範囲の端部である、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項3】
前記分割領域の端部は、前記撮像装置の光学系の光軸近傍である、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項4】
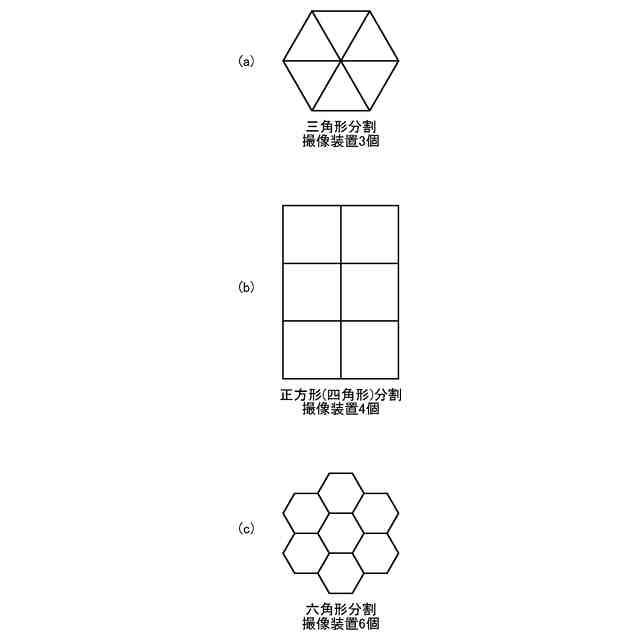
前記分割領域は、四角形であり、
前記撮像装置は、四角形の前記分割領域の端部に4個配置される、
ことを特徴とする請求項1ないし3のいずれか一項に記載の液体塗布装置。
【請求項5】
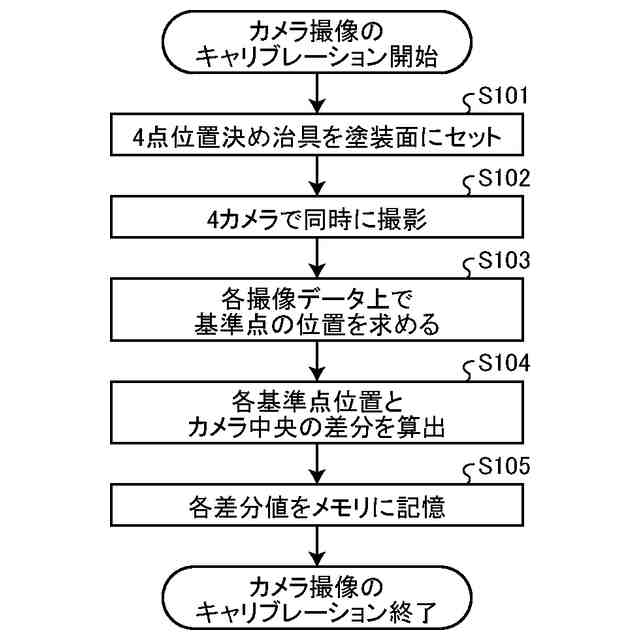
前記撮像装置間の距離設定は、稼働前に、装着位置を示す基準板治具を用いて前記撮像装置の原点を同時設定することで実施される、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項6】
前記撮像装置間の距離設定は、稼働前に、試しつなぎ印刷でのつなぎ精度を画像測定して、前記撮像装置の原点位置を調整する、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項7】
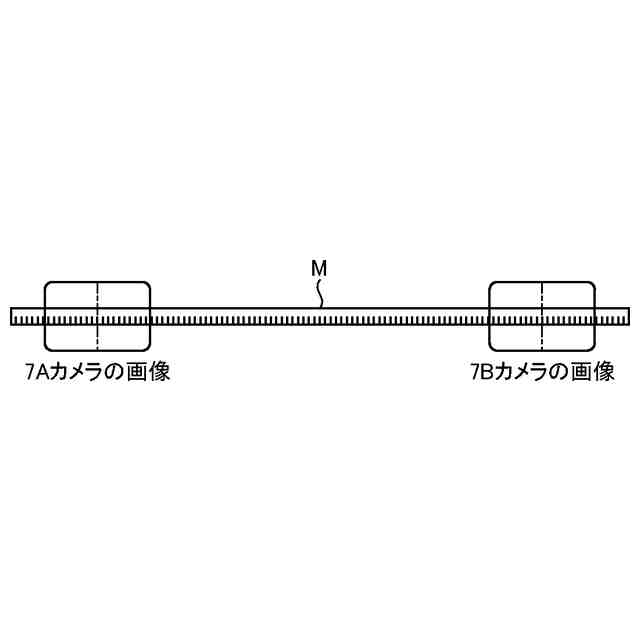
前記撮像装置間の距離設定は、事前に測定した2つの撮像装置間の距離を用いて、前記撮像装置の原点位置が調整される、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項8】
前記撮像装置は、撮影時以外に、前記撮像装置の光学系を保護する自動防塵カバー機構を備える、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項9】
前記撮像装置は、撮影時に、発光によって路面照度を一定に保つ照明を備える、
ことを特徴とする請求項1に記載の液体塗布装置。
【請求項10】
前記撮像装置は、撮影時に、前記撮像装置の光学系に向けて送風する自動エアブローを備える、
ことを特徴とする請求項1に記載の液体塗布装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、液体塗布装置、液体塗布方法およびプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、道路面上などに白線や文字、記号などを印刷する自走式の塗装装置においては、大きな画像を塗装(印刷)する際に、複数地点に分割した画像を印刷し、画像をつなぎ合わせる技術が知られている。このような技術によれば、塗装装置が移動することにより、画像の連続性に誤差が生じる場合があり、つなぎ目が顕著に見えてしまい、塗装装置の自己位置の推定が画像品質に大きく影響することになる。
【0003】
塗装装置の自己位置を推定する方法としては、例えば、下記に示す方法が既に知られている。
(1)速度検出器を用いてタイヤの向きや回転量から現在位置を推定する方法(オドメトリ)
(2)GNSS(Global Navigation Satellite System)で自己位置を推定する方法
(3)カメラで撮影した路面、床や天井、風景の映像と地図情報とから自己位置を推定する方法
【0004】
特許文献1には、広い表面上へ画像などを再現するためのデバイスであって、支持フレームに対し移動する印刷システムと、次に制作されなければならない隣接部分の正しい位置決めを可能にするために支持フレームに設けられた光学的観察システムと、を備えるデバイスが開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術によれば、画像をつなぎ合わせる際に1つのカメラで撮像した領域の4隅部を抽出して基準点合わせをするので、レンズなどのゆがみや路面凹凸による塗装装置自体の傾きで路面との平面角度がずれてしまうと、塗料の着弾位置がシフトされてしまい、路面の印刷画像に歪みが発生してしまう問題があった。
【0006】
本発明は、上記に鑑みてなされたものであって、高画質なつなぎ目品質(画像間のつなぎ段差が少ない品質)を実現することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、本発明は、液体塗布領域を複数に分割した各分割領域に順次移動し、複数の画像をつなげて液体塗布する液体塗布装置において、前記分割領域の端部に対向する位置に配置され、前記分割領域の端部同士が重なり合う領域に設定された基準位置を撮像する撮像装置と、前記撮像装置で撮像した基準位置を、画像書き出しの基準原点とする画像つなぎ計測部と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、高画質なつなぎ目品質(画像間のつなぎ段差が少ない品質)を実現することができる、という効果を奏する。
【図面の簡単な説明】
【0009】
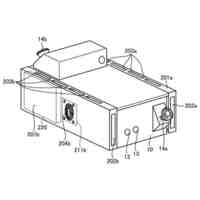
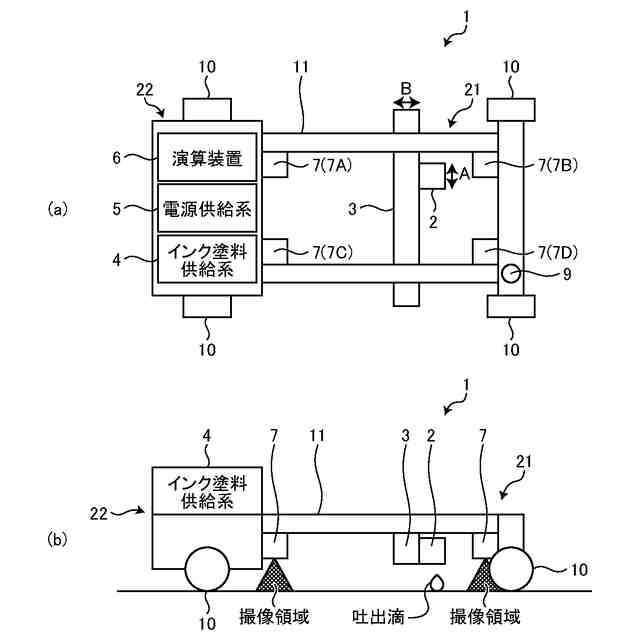
図1は、第1の実施の形態にかかる液体塗布装置の構成を示す図である。
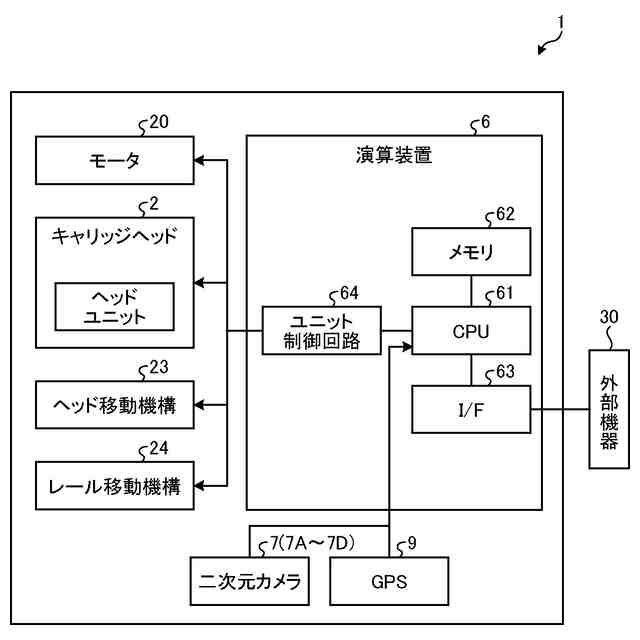
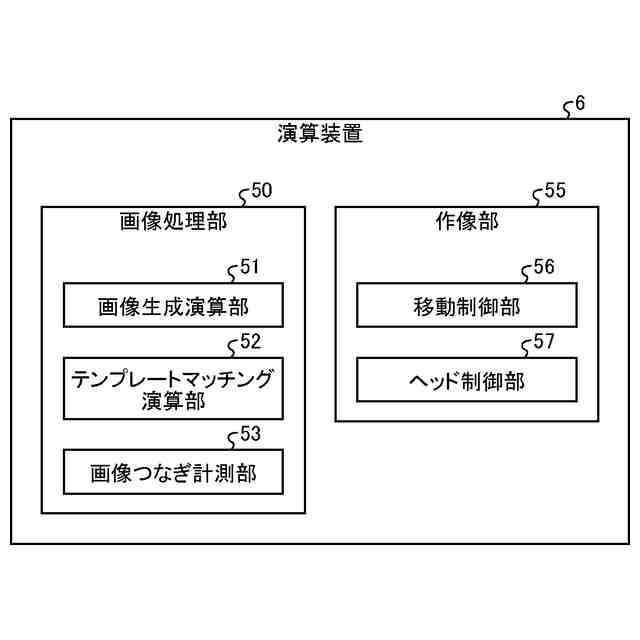
図2は、液体塗布装置の演算装置のハードウェア構成を示すブロック図である。
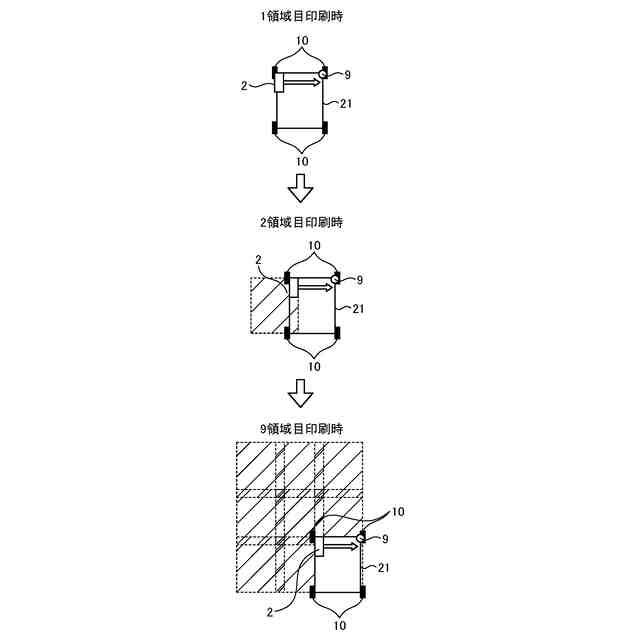
図3は、液体塗布装置がキャリッジ走査範囲外へ印刷する例を示す図である。
図4は、分割領域の形状例を示す図である。
図5は、4点用の基準治具板の例を示す図である。
図6は、4点用の基準治具板を用いたキャリブレーションの作業の流れを示すフローチャートである。
図7は、治具撮影時の撮影画像の一例を示す図である。
図8は、メジャーを用いた撮影時の撮影画像の一例を示す図である。
図9は、液体塗布装置が発揮する機能を示す機能ブロック図である。
図10は、印刷領域をつなぎ合わせる処理の流れを示すフローチャートである。
図11は、印刷領域(セグメント1)の基準点合わせの動作を説明する図である。
図12は、印刷領域(セグメント2)の基準点合わせの動作を説明する図である。
図13は、印刷領域(セグメント1、2)の重ね合わせの動作を説明する図である。
図14は、従来例の問題点を説明する図である。
図15は、第2の実施の形態にかかる液体塗布装置が備える二次元カメラを示す図である。
図16は、第3の実施の形態にかかる液体塗布装置が備える二次元カメラを示す図である。
図17は、第4の実施の形態にかかる液体塗布装置が備える二次元カメラを示す図である。
図18は、第5の実施の形態にかかる液体塗布装置が備える二次元カメラ7を示す図である。
【発明を実施するための形態】
【0010】
以下に添付図面を参照して、液体塗布装置、液体塗布方法およびプログラムの実施の形態を詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社リコー
履帯式走行体
1日前
他の特許を見る



 特許ウォッチ
特許ウォッチ