TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127108
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024023630
出願日
2024-02-20
発明の名称
作業機械の遠隔操作システム、作業機械の遠隔コントローラ、及び作業機械の遠隔操作方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/26 20060101AFI20250825BHJP(水工;基礎;土砂の移送)
要約
【課題】遠隔操作される作業機械の作業効率の低下を抑制すること。
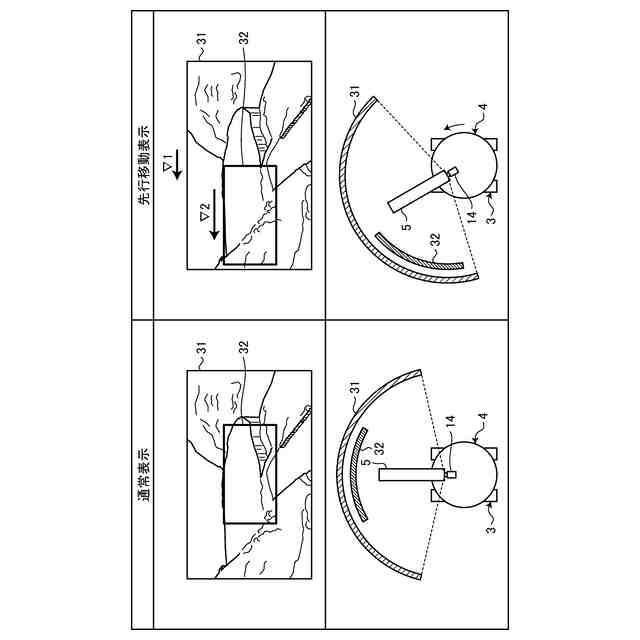
【解決手段】遠隔操作システムは、表示装置と、遠隔コントローラと、を備える。遠隔コントローラは、作業機械に搭載されているカメラにより撮像された画像データを受信する画像データ取得部と、画像データから画像データの外形よりも小さい抽出範囲の表示データを抽出する表示データ生成部と、抽出範囲を移動するための移動信号を受信する移動信号受信部と、移動信号に基づいて抽出範囲を移動して、抽出範囲の表示データを表示装置に表示させる表示制御部と、を有する。
【選択図】図7
特許請求の範囲
【請求項1】
表示装置と、
遠隔コントローラと、を備え、
前記遠隔コントローラは、
作業機械に搭載されているカメラにより撮像された画像データを受信する画像データ取得部と、
前記画像データから前記画像データの外形よりも小さい抽出範囲の表示データを抽出する表示データ生成部と、
前記抽出範囲を移動するための移動信号を受信する移動信号受信部と、
前記移動信号に基づいて前記抽出範囲を移動して、前記抽出範囲の表示データを前記表示装置に表示させる表示制御部と、を有する、
作業機械の遠隔操作システム。
続きを表示(約 1,000 文字)
【請求項2】
前記作業機械は、可動部と、前記可動部の動作を検出する動作センサと、を有し、
前記移動信号は、前記動作センサの検出信号を含み、
前記表示制御部は、前記可動部の移動方向に前記抽出範囲を移動する、
請求項1に記載の作業機械の遠隔操作システム。
【請求項3】
前記作業機械は、旋回体を有し、
前記カメラは、前記旋回体に固定され、
前記動作センサは、前記旋回体の旋回動作を検出し、
前記表示制御部は、前記旋回体の旋回方向に前記抽出範囲を移動する、
請求項2に記載の作業機械の遠隔操作システム。
【請求項4】
前記表示制御部は、前記旋回体の旋回速度よりも高い移動速度で前記抽出範囲を移動する、
請求項3に記載の作業機械の遠隔操作システム。
【請求項5】
前記表示制御部は、前記旋回動作が開始されたときに前記抽出範囲の移動を開始する、
請求項4に記載の作業機械の遠隔操作システム。
【請求項6】
前記表示制御部は、前記旋回動作が終了したときに前記抽出範囲の移動を終了する、
請求項5に記載の作業機械の遠隔操作システム。
【請求項7】
前記作業機械は、作業機を有し、
前記動作センサは、前記作業機の移動動作を検出し、
前記表示制御部は、前記作業機の移動方向に前記抽出範囲を移動する、
請求項2に記載の作業機械の遠隔操作システム。
【請求項8】
前記表示制御部は、前記作業機の移動速度よりも高い移動速度で前記抽出範囲を移動する、
請求項7に記載の作業機械の遠隔操作システム。
【請求項9】
前記表示制御部は、前記作業機に追従するように前記抽出範囲を移動する、
請求項7に記載の作業機械の遠隔操作システム。
【請求項10】
操作装置と、
前記操作装置を操作するオペレータの視線を検出する視線センサと、を備え、
前記移動信号は、前記視線センサの検出信号を含み、
前記表示制御部は、前記視線の移動方向に前記抽出範囲を移動する、
請求項1に記載の作業機械の遠隔操作システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の遠隔操作システム、作業機械の遠隔コントローラ、及び作業機械の遠隔操作方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような作業機械が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2021-025223号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
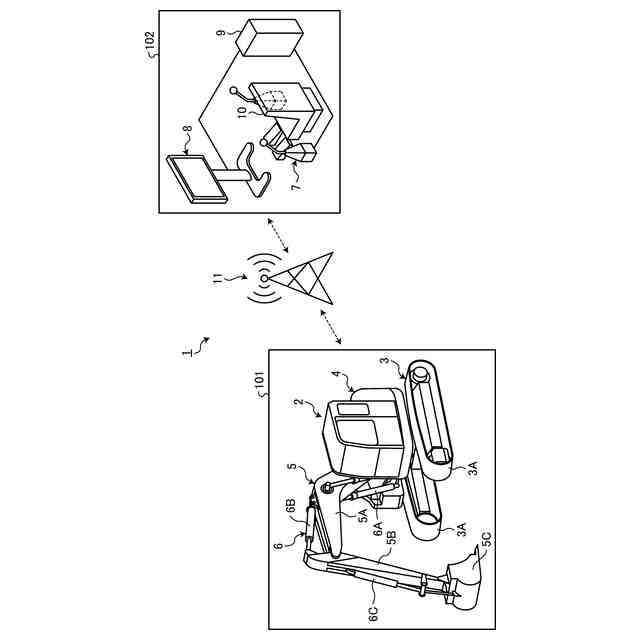
作業機械の遠隔操作システムは、作業機械の外部に配置される表示装置を備える。作業機械に搭載されているカメラにより撮像された画像データが表示装置に表示される。オペレータは、表示装置に表示された画像データを確認しながら作業機械を遠隔操作する。作業効率の低下を抑制するためには、作業現場の状況をオペレータに適切に提供する必要がある。
【0005】
本開示は、遠隔操作される作業機械の作業効率の低下を抑制することを目的とする。
【課題を解決するための手段】
【0006】
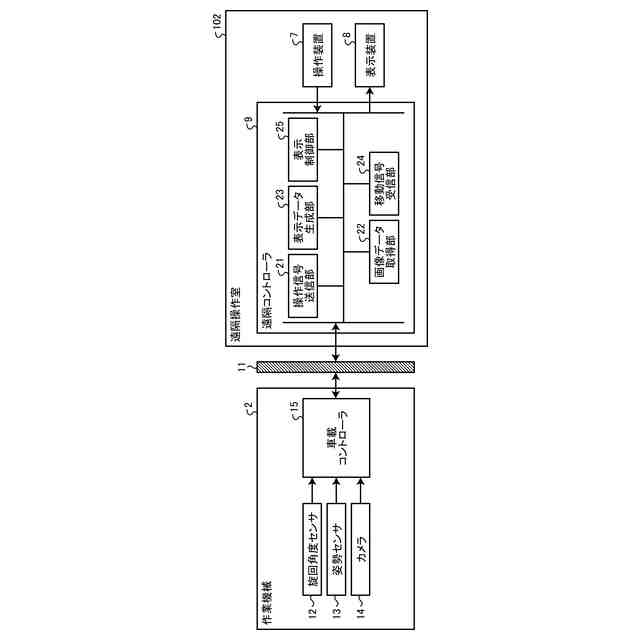
本開示に従えば、表示装置と、遠隔コントローラと、を備える、作業機械の遠隔操作システムが提供される。遠隔コントローラは、作業機械に搭載されているカメラにより撮像された画像データを受信する画像データ取得部と、画像データから画像データの外形よりも小さい抽出範囲の表示データを抽出する表示データ生成部と、抽出範囲を移動するための移動信号を受信する移動信号受信部と、移動信号に基づいて抽出範囲を移動して、抽出範囲の表示データを表示装置に表示させる表示制御部と、を有する。
【発明の効果】
【0007】
本開示によれば、遠隔操作される作業機械の作業効率の低下が抑制される。
【図面の簡単な説明】
【0008】
図1は、第1実施形態に係る作業機械の遠隔操作システムを模式的に示す図である。
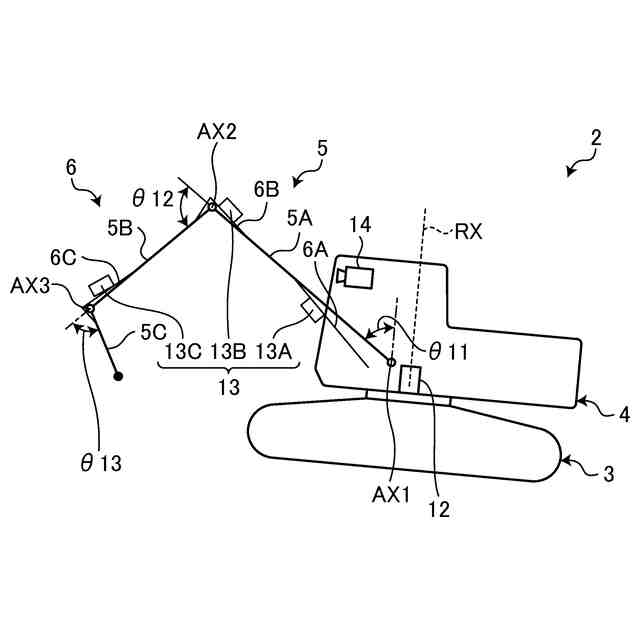
図2は、第1実施形態に係る作業機械を模式的に示す側面図である。
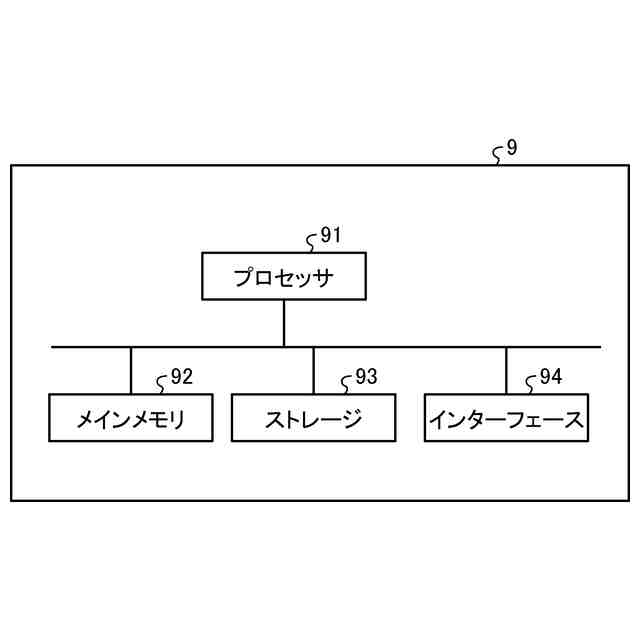
図3は、第1実施形態に係る遠隔コントローラを示すハードウエア構成図である。
図4は、第1実施形態に係る作業機械及び遠隔コントローラを示す機能ブロック図である。
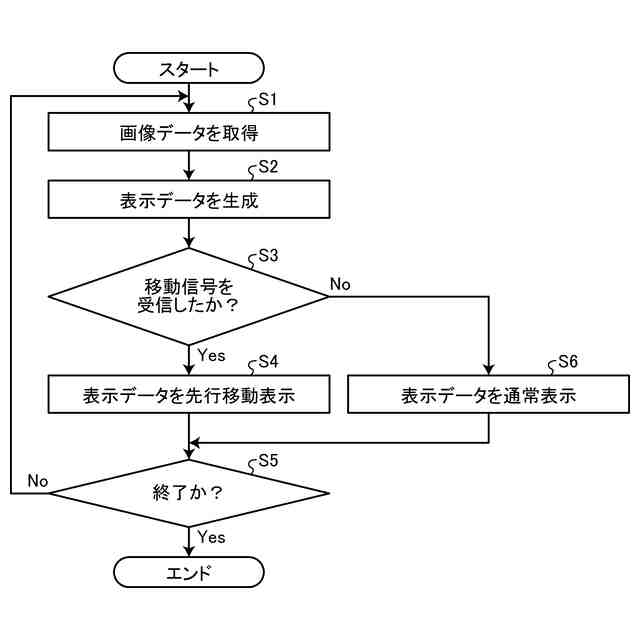
図5は、第1実施形態に係る作業機械の遠隔操作方法を示すフローチャートである。
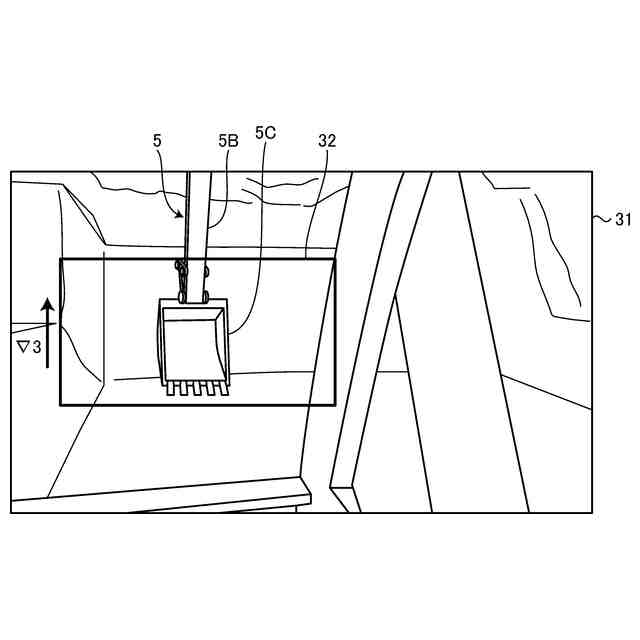
図6は、第1実施形態に係る画像データと表示データとの関係を示す図である。
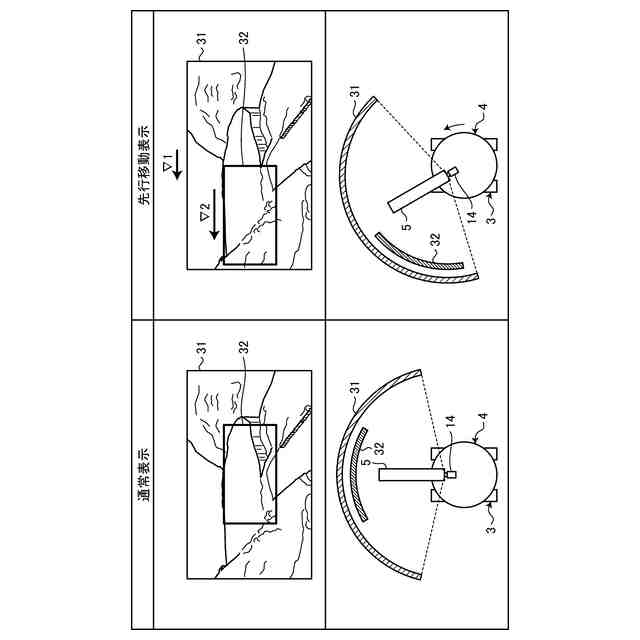
図7は、第1実施形態に係る通常表示及び先行移動表示を説明する図である。
図8は、第2実施形態に係る画像データと表示データとの関係を示す図である。
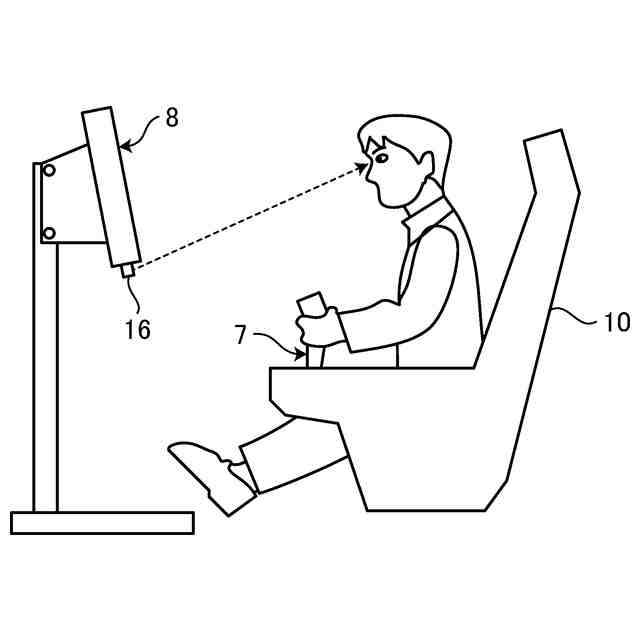
図9は、第3実施形態に係る遠隔操作室を模式的に示す図である。
図10は、第4実施形態に係る通常表示及び追従移動表示を説明する図である。
図11は、第4実施形態に係る旋回体及び作業機のそれぞれの動作と表示データとの関係を説明する図である。
図12は、第5実施形態に係る通常表示及び先行移動表示を説明する図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[第1実施形態]
第1実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ