TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025137738
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2025123344,2021133921
出願日
2025-07-23,2021-08-19
発明の名称
オンラインロボット動作計画のフレームワーク
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
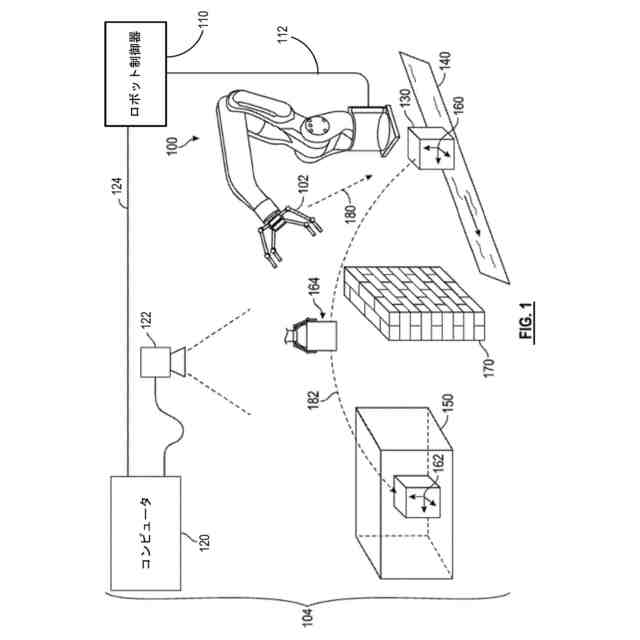
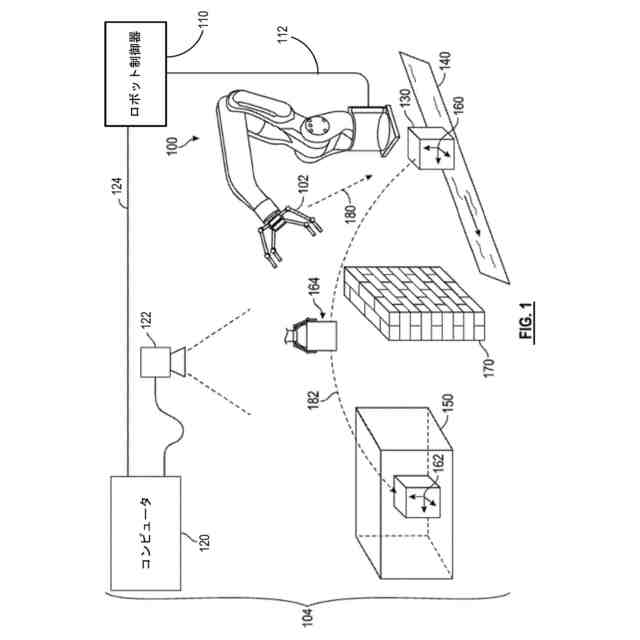
【課題】ロボット制御器と通信する外部コンピュータを使用したロボットの動作計画技術を提供する。
【解決手段】カメラ又はセンサシステムはスタート及びゴール地点、並びに障害物データを含む入力シーン情報をコンピュータに提供する。コンピュータはロボットのツールの動作をスタート及びゴール地点、並びに障害物環境に基づいて計画し、ロボット動作はサンプリングベース及び最適化ベースの計画アルゴリズムの直列又は並列組合せを使用し計画される。直列組合せでは、サンプリング法で実行可能な経路が見いだされ、最適化方法が経路の品質を向上させる。並列組合せでは、サンプリング及び最適化の両方が使用され、計算時間、経路の品質等の要因に基づいて経路が選択される。コンピュータはロボット制御器へ転送するために計画された密集経由地点をまばらな命令地点へと変換し、制御器はロボット運動学及び補間地点を計算しロボットの動作を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
ツールの経路のスタート地点及びゴール地点、並びに回避するべき障害物のデータを含むロボット上の前記ツールの前記経路を計画するための入力情報を提供することと、
サンプリングベースの動作計画方法及び最適化ベースの動作計画方法の並列組み合わせを使用して計画経路を計算し選択することを含む、プロセッサとメモリを有するコンピュータにより前記入力情報に基づいて経由地点のセットを備えた前記計画経路を計算し選択することと、
前記コンピュータと通信するロボット制御器により前記ロボット上の前記ツールが前記計画経路に追従するようロボットの関節の動作を計算することと、
を含み、
前記計画経路の計算と選択において、前記サンプリングベースの動作計画方法及び前記最適化ベースの動作計画方法はそれぞれ前記入力情報に基づいて提案経路を計算し、前記サンプリングベースの動作計画方法と前記最適化ベースの動作計画方法の両方により提案経路が提供されると、前記計画経路はより高い品質を持つ前記提案経路として選択され、品質は少なくとも経路長と経路の滑らかさとして決定される、
産業用ロボットの動作計画方法。
続きを表示(約 1,700 文字)
【請求項2】
入力情報の提供は、作業空間を描写するカメラ画像又はセンサデータを提供することと、前記スタート地点及び前記ゴール地点を前記カメラ画像又はセンサデータから決定することと、を含み、前記スタート地点及び前記ゴール地点はそれぞれ3次元(3D)における位置及び方向を含む、請求項1に記載の方法。
【請求項3】
前記障害物を定義する前記データは前記カメラ画像又はセンサデータのいずれかにより決定されるか、又は別の情報源より3Dモデルデータとして提供される、請求項2に記載の方法。
【請求項4】
前記サンプリングベースの動作計画方法は、提案された経由地点のランダムツリー構造を構築し、最終的に前記スタート地点及び前記ゴール地点を衝突せず接続する経由地点を選択することにより前記計画経路上の前記経由地点を決定する、請求項1に記載の方法。
【請求項5】
前記最適化ベースの動作計画方法は、前記スタート地点から前記ゴール地点までの前記経由地点を経路の品質のために目的関数を使用し、また衝突回避のために拘束関数を使用して反復計算することにより、前記計画経路上の前記経由地点を決定する、請求項1に記載の方法。
【請求項6】
待ち時間の閾値に達したときは前記サンプリングベースの方法又は前記最適化ベースの方法のうち一方のみが提案経路を提供し、前記提案経路の前記品質が予め定義された品質指標値を下回らない限り、提供される前記提案経路は前記計画経路として指定される、請求項1に記載の方法。
【請求項7】
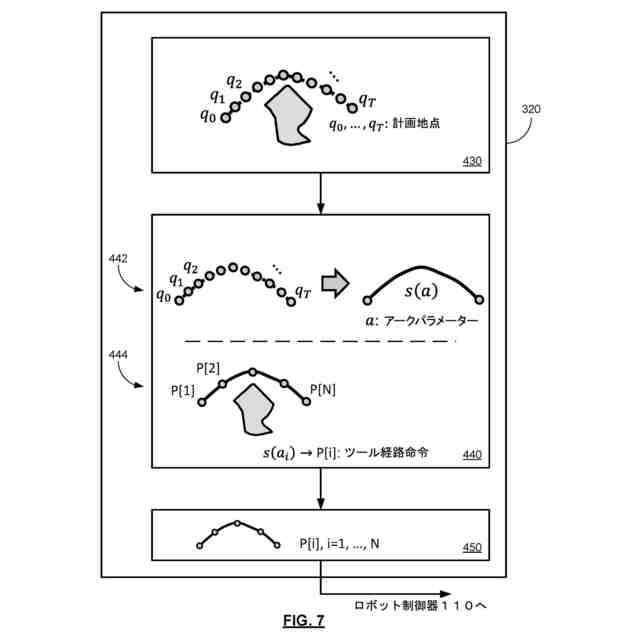
前記コンピュータにより前記計画経路を表す命令地点の削減されたセットを計算することと、ここで前記計画経路中の経由地点の数は命令地点の数よりも大きく、
前記命令地点のセットを前記ロボット制御器に転送し前記命令地点に基づいて前記ロボットの関節動作を計算することと、ここで前記命令地点の削減されたセットの計算は前記計画経路の前記経由地点をフィットさせるためにスプライン曲線関数を計算することを含み、ここで0から1の範囲の値を持つアーク長パラメーターは前記スプライン曲線関数上の位置を定義し、
前記アーク長パラメーター及び前記命令地点の数に基づいて前記スプライン曲線関数を前記各命令地点で評価することと、を更に含む、請求項1に記載の方法。
【請求項8】
ロボットの関節動作の計算は逆運動学計算のタイプを選択することと、前記逆運動学計算を実行することと、前記命令地点間の補間地点を計算することと、を含む、請求項7に記載の方法。
【請求項9】
前記補間地点に関連するロボットツール動作命令を定義すること、関節動作命令及び前記ロボットツール動作命令を前記ロボットへ提供することと、を更に含む、請求項8に記載の方法。
【請求項10】
サンプリングベースの動作計画方法及び最適化ベースの動作計画方法の並列組み合わせを使用して計画経路を計算し選択することを含み、プロセッサとメモリを有するコンピュータにより、前記計画経路のスタート地点及びゴール地点及び回避すべき障害物を定義するデータを含む入力情報に基づいて経由地点のセットを含む前記計画経路を計算し選択することと、
前記計画経路を示す削減された命令地点のセットを前記コンピュータにより計算することと、
前記削減された命令地点のセットをロボット制御器へ転送することと、
前記ロボット制御器により前記命令地点に基づいて、ロボット上のツールが前記計画経路に追従するようロボット関節動作を計算することと、
を含み、
前記計画経路の計算と選択において、前記サンプリングベースの動作計画方法及び前記最適化ベースの動作計画方法はそれぞれ前記入力情報に基づいて提案経路を計算し、前記サンプリングベースの動作計画方法と前記最適化ベースの動作計画方法の両方により提案経路が提供されると、前記計画経路はより高い品質を持つ前記提案経路として選択され、品質は少なくとも経路長と経路の滑らかさとして決定される、
産業用ロボットの動作計画方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は一般的に産業用ロボットの動作制御の分野に関し、より具体的には、スタート及びゴール地点並びに障害物環境に基づいたロボット動作を計画するためにロボット制御器から分離されたコンピュータを使用するロボットの動作制御技術に関する。ここでロボット動作計画はサンプリングベース及び最適化ベースの計画アルゴリズムの直列又は並列組み合わせを使用し、ロボット制御器へ転送するために計画された密集した経由地点をまばらな命令地点へと変換することにより行われる。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
産業用ロボットの用途として、様々な製造、組み立て、材料運搬の実行が広く知られている。あるロボット応用では、全てのロボットタスクに応じて、スタート及び/又はゴール地点が変化する。例えば、ロボットのタスクが入庫コンベヤーから部品を取り上げ、その部品を輸送コンテナ中の空いた場所に置くことである場合などが該当する。このような応用では、各タスクに対して新しいロボット動作経路をリアルタイムで計算しなければならない。更に、多くのロボットの作業空間環境では、障害物が存在し、ロボットの動作経路上に位置し得る。障害物は機械や備品といった恒久的な構造物であるかもしれず、又は障害物は一時的又は可動性であるかもしれない。ロボットとあらゆる障害物の衝突は絶対に避けられなければならない。
【0003】
スタート及びゴール地点、並びに障害物環境に基づいてロボットのツール経路動作を計画する様々な技術が当分野で知られている。ある一般的に使用される技術はサンプリングベースの方法であり、ランダムなサンプルの経由地点が定義され、スタート地点からゴール地点が接続されるまで、衝突の起こらない経由地点のツリーを延ばしていく。別の既知の技術は最適化ベースの方法であり、衝突しない経路が得られるまで、スタート地点からゴール地点までの経路に沿った経由地点を最適化目的及び拘束関数を使用して繰り返し修正していく。サンプリングベースの方法の変形例を含むその他の技術も存在する。
【0004】
動作計画計算をロボット制御器とは分離されたコンピュータ上で行うことがロボットの動作計画における最近のトレンドである。衝突しない経路を見出すためのサンプリングベースの動作計画を実行し、次にロボットツール軌道を作り出すために補間地点を計算し、そして軌道をロボット制御器へ転送しロボットが実行するタイプのシステムが知られている。しかしながら、これらのシステムは集中的な通信帯域の要求を生じさせ、ロボット制御器のロボット動作計画計算機能の利点を享受することに失敗し、所望の品質の経路計画を提供できないことがある。
【0005】
前述の状況を鑑み、高品質な経路計画を提供し、ロボットの動作中にリアルタイムで実行するために充分高速で、ロボット制御器固有の計算性能の利点を享受できるロボット動作計画技術が必要とされている。
【発明の概要】
【0006】
本開示の教示に従い、ロボット制御器と通信する外部コンピュータを使用したロボットの動作計画技術が開示される。カメラ又はセンサシステムはスタート及びゴール地点、並びに障害物データを含む入力シーン情報を外部コンピュータに提供する。コンピュータはロボットのツールの動作をスタート及びゴール地点、並びに障害物環境に基づいて計画し、ここでロボット動作はサンプリングベース及び最適化ベースの計画アルゴリズムの直列又は並列組み合わせを使用して計画される。直列組み合わせでは、まずサンプリング法において実行可能な経路が見いだされ、最適化方法が経路の品質を向上させる。並列組み合わせでは、サンプリング及び最適化法の両方が使用され、計算時間、経路の品質及びその他の要因に基づいて経路が選択される。コンピュータはロボット制御器へ転送するために計画された密集した経由地点をまばらな経路地点へと変換し、制御器はロボット運動学及び補間地点を計算し、これらを使用してロボットの動作を制御する。
【0007】
開示される装置及び方法の追加の特徴は、添付の図面と併せて考慮した以下の説明及び添付された請求項から明らかになろう。
【図面の簡単な説明】
【0008】
図1は、各加工対象物を動かすたびに新たな経路を計算しなければならなく、作業空間が回避すべき1つ以上の障害物を含む環境にて、取り上げ、移動、そして置く動作を行っている産業用ロボットの図である。
図2は既知の従来の技術におけるロボット制御器と通信する外部コンピュータを使用したロボット動作経路計画システムのブロック図である。
図3は本開示の実施形態における、ロボット制御器と通信する外部コンピュータを使用したロボット動作経路計画システムのブロック図である。
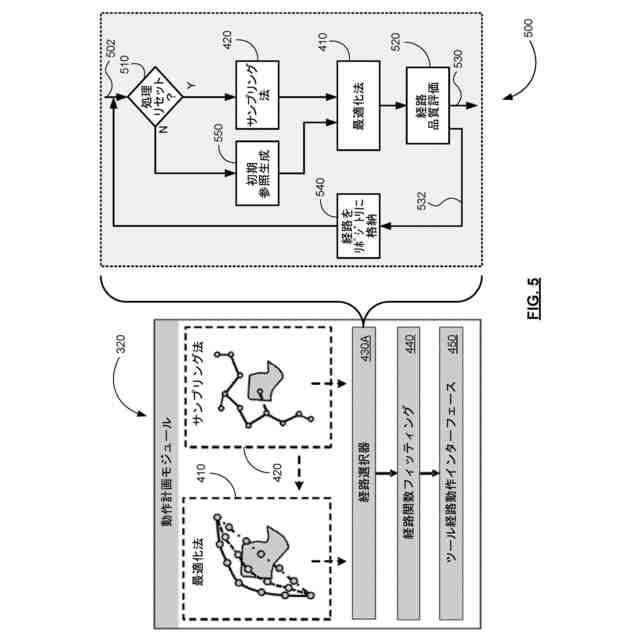
図4は図3の本開示の実施形態における最適化及びサンプリング動作計画方法の組み合わせを使用したシステムの動作計画モジュールのブロック図である。
図5は本開示の実施形態による図4の動作計画モジュールにてサンプリング及び最適化動作計画の直列組み合わせを用いる経路選択方法のフローチャートである。
図6は本開示の実施形態による図4の動作計画モジュールにてサンプリング及び最適化動作計画の並列組み合わせを用いる経路選択方法のフローチャートである。
図7は本開示の実施形態による図4の動作計画モジュールにて使用される経路関数フィッティングモジュールのブロック図である。
【発明を実施するための形態】
【0009】
本開示の実施形態に関する、最適化とサンプリング法の組み合わせ及び経路関数フィッティングを使用したロボットの動作計画技術に向けられた以下の議論は単に例示的な性質のものであり、開示された装置及び技術、又は応用や用途を限定することを決して意図していない。
【0010】
産業用ロボットを様々な製造、組み立て、材料運搬の動作に使用することは広く知られている。これらの動作には、ロボットが、ある動作と次の動作で異なるスタート地点及び/又は目的(ゴール)地点を有する経路に沿って動くようプログラムされなければならないものがある。例えば、移動、取り上げ、及び置く動作では、コンベヤーに乗って入庫する部品はロボットによって毎回異なる位置から取り上げられるかもしれず、ロボットによって輸送コンテナに置かれる部品は、輸送コンテナ内で各々異なる指定された場所に置かれるであろう。或いは、部品で一杯の容器からロボットによって部品が取り上げられ、出庫コンベヤーに載せられてもよい。他にもロボットの各独立したタスク又は動作に対して新たな経路を計算しなければならない多くの応用例が存在する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る




 特許ウォッチ
特許ウォッチ