TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025139307
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038163
出願日
2024-03-12
発明の名称
装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250918BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】単純な構造によってツールを精度よく把持可能な装置を提供する。
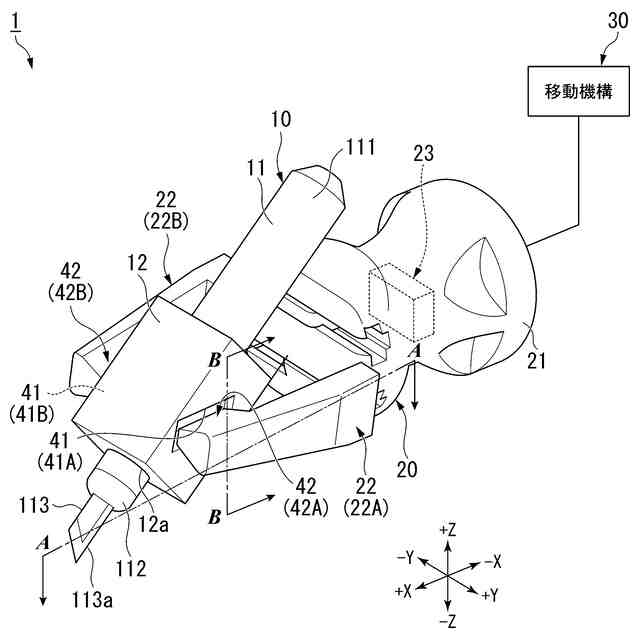
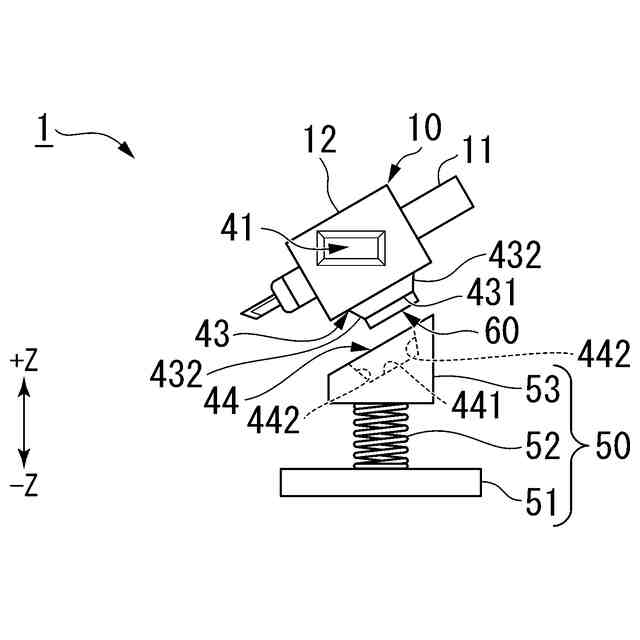
【解決手段】装置は、第1嵌合部を有するツールと、第2嵌合部を有する複数の指部と、前記複数の指部を駆動するアクチュエータと、を有する把持機構と、前記把持機構を移動させる移動機構と、を備え、前記第1嵌合部および前記第2嵌合部の少なくとも一方は、テーパ形状を有し、前記第1嵌合部および前記第2嵌合部は、前記複数の指部が前記ツールを把持するように前記アクチュエータが前記複数の指部を駆動する際に、互いに嵌合する。
【選択図】図1
特許請求の範囲
【請求項1】
第1嵌合部を有するツールと、
第2嵌合部を有する複数の指部と、前記複数の指部を駆動するアクチュエータと、を有する把持機構と、
前記把持機構を移動させる移動機構と、を備え、
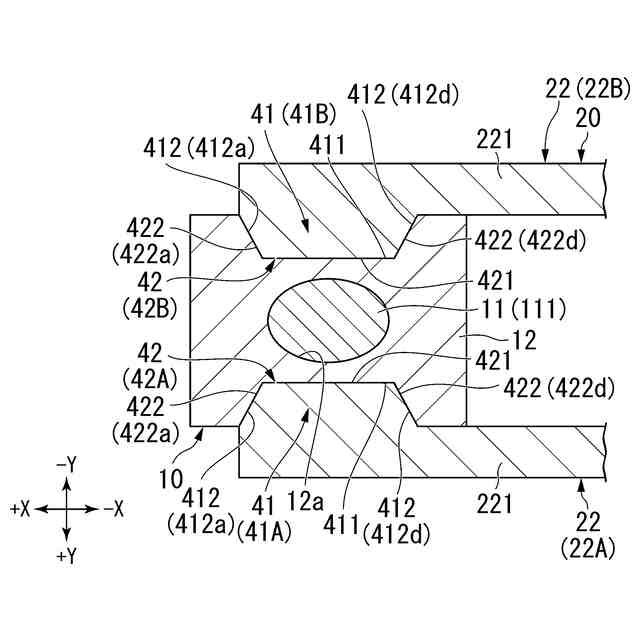
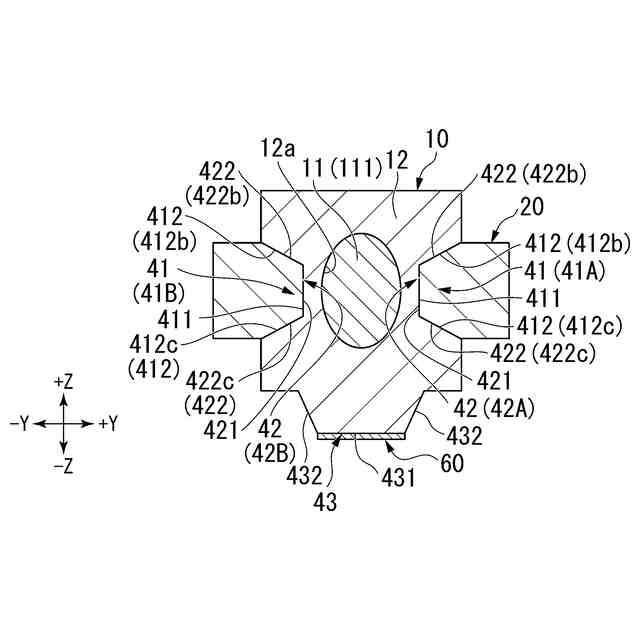
前記第1嵌合部および前記第2嵌合部の少なくとも一方は、テーパ形状を有し、
前記第1嵌合部および前記第2嵌合部は、前記複数の指部が前記ツールを把持するように前記アクチュエータが前記複数の指部を駆動する際に、互いに嵌合する、
装置。
続きを表示(約 700 文字)
【請求項2】
前記ツールが載置される載置機構をさらに備え、
前記載置機構は、基部と、前記ツールが前記載置機構に載置される際に前記ツールに接触する接触部と、前記基部と前記接触部とを弾性的に接続する弾性接続部と、を有する、
請求項1に記載の装置。
【請求項3】
前記ツールが載置される載置機構をさらに備え、
前記ツールは、第3嵌合部を有し、
前記載置機構は、第4嵌合部を有し、
前記第3嵌合部および前記第4嵌合部の少なくとも一方は、テーパ形状を有し、
前記第3嵌合部および前記第4嵌合部は、前記ツールが前記載置機構に載置されるように前記移動機構が前記把持機構を移動させる際に、互いに嵌合する、
請求項1または2に記載の装置。
【請求項4】
前記第1嵌合部は、凹形状を有し、
前記第2嵌合部は、凸形状を有する、
請求項1または2に記載の装置。
【請求項5】
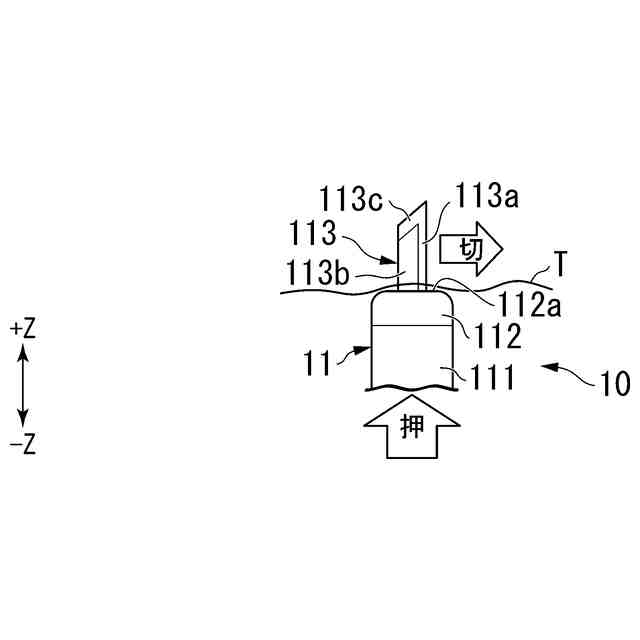
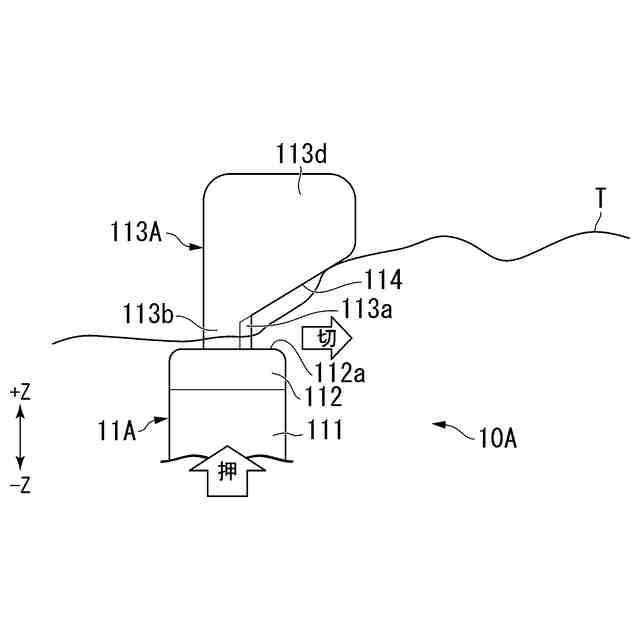
前記ツールは、切断対象を切断するための刃を有し、
前記刃は、前記切断対象を切断するために前記ツールが移動する方向に対して垂直な方向に延びている、
請求項1または2に記載の装置。
【請求項6】
前記ツールは、前記刃の一端に接続される補助面を有し、
前記補助面は、前記刃が延びる方向に対して交差する面内に延在する、
請求項5に記載の装置。
【請求項7】
前記ツールは、前記切断対象に接触して前記切断対象を前記刃に案内する案内部を有する、
請求項5に記載の装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ツールを用いて作業を行う装置が知られている(例えば、特許文献1を参照)。このような装置は、例えば、ツールと、当該ツールを把持する把持機構(例えば、エンドエフェクタ)と、当該把持機構を移動させるための移動機構(例えば、ロボットアーム)と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2018-158405号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような装置においては、把持機構に、ツールを精度よく把持させる必要がある。このような高精度な把持を実現するために、従来の装置においては、把持機構として多指多自由度のハンドを採用し、当該ハンドがツールを包み込むように把持することで、把持を強固にする場合があった。あるいは、ツールに取り付けられたマーカの位置をセンサによって認識することでハンドと把持機構との間の位置決めを行い、把持の精度を確保する場合もあった。
【0005】
しかしながら、多指多自由度のハンドは部品点数が多く、装置のコストの増大を招く可能性がある。また、部品点数が多くなることは、品質や信頼性を保つための労力の増大させる可能性がある。
【0006】
また、マーカおよびセンサを用いる構成も、装置のコストの増大を招く可能性がある。また、装置が取り扱うことのできるツールが、マーカを取り付け可能なものに限定されてしまうという欠点も存在する。
【0007】
本発明は、このような事情を考慮してなされ、単純な構造によってツールを精度よく把持可能な装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
(1)上記課題を解決するために、本発明の態様1に係る装置は、第1嵌合部を有するツールと、第2嵌合部を有する複数の指部と、前記複数の指部を駆動するアクチュエータと、を有する把持機構と、前記把持機構を移動させる移動機構と、を備え、前記第1嵌合部および前記第2嵌合部の少なくとも一方は、テーパ形状を有し、前記第1嵌合部および前記第2嵌合部は、前記複数の指部が前記ツールを把持するように前記アクチュエータが前記複数の指部を駆動する際に、互いに嵌合する。
【0009】
(2)また、本発明の態様2は、態様1の装置において、前記ツールが載置される載置機構をさらに備え、前記載置機構は、基部と、前記ツールが前記載置機構に載置される際に前記ツールに接触する接触部と、前記基部と前記接触部とを弾性的に接続する弾性接続部と、を有する。
【0010】
(3)また、本発明の態様3は、態様1または態様2の装置において、前記ツールが載置される載置機構をさらに備え、前記ツールは、第3嵌合部を有し、前記載置機構は、第4嵌合部を有し、前記第3嵌合部および前記第4嵌合部の少なくとも一方は、テーパ形状を有し、前記第3嵌合部および前記第4嵌合部は、前記ツールが前記載置機構に載置されるように前記移動機構が前記把持機構を移動させる際に、互いに嵌合する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ