TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025038755
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145547
出願日
2023-09-07
発明の名称
群制御システム及び群制御方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/43 20240101AFI20250312BHJP(制御;調整)
要約
【課題】複数の移動体を適切に制御することができる群制御システム及び群制御方法を提供する。
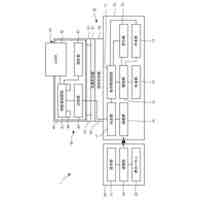
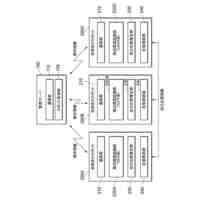
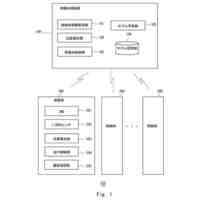
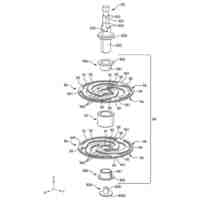
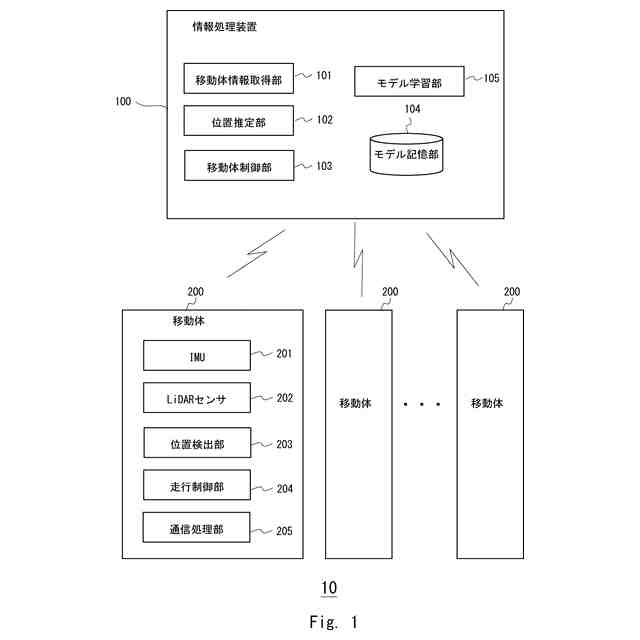
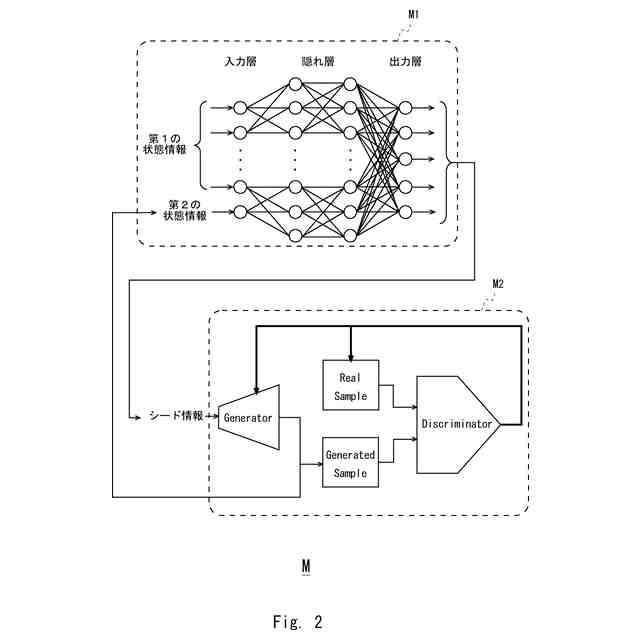
【解決手段】群制御システム10は、各移動体200の加速データを取得する加速度データ取得部と、各移動体200の現在の位置を推定する位置推定部102と、各移動体200の加速度データと推定された位置とを含む第1の状態情報と、各移動体200の未来の状態を表す第2の状態情報とを、深層強化学習モデルM1に入力し、深層強化学習モデルM1からの出力に基づいて各移動体200の行動を制御する処理を繰り返し実行する移動体制御部103とを有する。深層強化学習モデルM1に入力される第2の状態情報は、敵対的生成ネットワークM2に、シード情報を入力して得られる出力を用いて予測された各移動体200の未来の状態を表す。
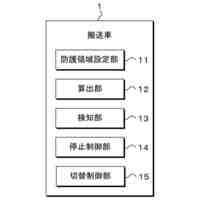
【選択図】図1
特許請求の範囲
【請求項1】
所定エリア内を自律的に走行可能な複数の移動体を制御する群制御システムであって、
前記移動体に備えられたセンサによって検出された加速度データを、各前記移動体について取得する加速度データ取得部と、
前記各移動体の現在の位置を推定する位置推定部と、
前記各移動体の前記加速度データと推定された前記位置とを含む第1の状態情報と、前記各移動体の未来の状態を表す第2の状態情報とを、深層強化学習モデルに入力し、前記深層強化学習モデルからの出力に基づいて前記各移動体の行動を制御する処理を繰り返し実行する移動体制御部と
を有し、
前記深層強化学習モデルに入力される前記第2の状態情報は、敵対的生成ネットワークに、シード情報を入力して得られる出力を用いて予測された前記各移動体の未来の状態を表し、
前記シード情報は、前回の前記処理において前記深層強化学習モデルから出力された情報を含む
群制御システム。
続きを表示(約 760 文字)
【請求項2】
前記深層強化学習モデルは、前記位置推定部により推定される前記各移動体の位置と、前記各移動体の実際の位置との差に基づいて報酬が付与されるよう設定された環境において、深層強化学習が行われたモデルである
請求項1に記載の群制御システム。
【請求項3】
前記第2の状態情報は、前記各移動体の未来の時点の位置と加速度データとを含む
請求項1又は2に記載の群制御システム。
【請求項4】
前記敵対的生成ネットワークは、未来の異なる時点の前記各移動体の位置を示す複数の画像を出力し、
前記第2の状態情報は、前記複数の画像に示される異なる時点の前記各移動体の位置から算出された未来の時点の前記加速度データを含む
請求項3に記載の群制御システム。
【請求項5】
所定エリア内を自律的に走行可能な複数の移動体を制御する群制御方法であって、
前記移動体に備えられたセンサによって検出された加速度データを、各前記移動体について取得し、
前記各移動体の現在の位置を推定し、
前記各移動体の前記加速度データと推定された前記位置とを含む第1の状態情報と、前記各移動体の未来の状態を表す第2の状態情報とを、深層強化学習モデルに入力し、前記深層強化学習モデルからの出力に基づいて前記各移動体の行動を制御する処理を繰り返し実行し、
前記深層強化学習モデルに入力される前記第2の状態情報は、敵対的生成ネットワークに、シード情報を入力して得られる出力を用いて予測された前記各移動体の未来の状態を表し、
前記シード情報は、前回の前記処理において前記深層強化学習モデルから出力された情報を含む
群制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は群制御システム及び群制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、自律的に走行可能なロボットなどの移動体を複数用いたシステムの開発が進んでいる。これに伴い、複数の移動体を制御する群制御についての様々な技術が提案されている。例えば、特許文献1は、移動体同士の衝突などを回避することができる群制御システムについて開示している。
【先行技術文献】
【特許文献】
【0003】
特開2017-142778号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、移動体の群制御を行う装置が把握している各移動体の位置と、実際の各移動体の位置との誤差が増大すると、適切に移動体を制御することができないことがある。このような背景から、複数の移動体を適切に制御することができる技術が求められている。
【0005】
本開示は、上記した事情を背景としてなされたものであり、複数の移動体を適切に制御することができる群制御システム及び群制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本開示の一態様は、所定エリア内を自律的に走行可能な複数の移動体を制御する群制御システムであって、前記移動体に備えられたセンサによって検出された加速度データを、各前記移動体について取得する加速度データ取得部と、前記各移動体の現在の位置を推定する位置推定部と、前記各移動体の前記加速度データと推定された前記位置とを含む第1の状態情報と、前記各移動体の未来の状態を表す第2の状態情報とを、深層強化学習モデルに入力し、前記深層強化学習モデルからの出力に基づいて前記各移動体の行動を制御する処理を繰り返し実行する移動体制御部とを有し、前記深層強化学習モデルに入力される前記第2の状態情報は、敵対的生成ネットワークに、シード情報を入力して得られる出力を用いて予測された前記各移動体の未来の状態を表し、前記シード情報は、前回の前記処理において前記深層強化学習モデルから出力された情報を含む群制御システムである。
【0007】
上記の一態様において、前記深層強化学習モデルは、前記位置推定部により推定される前記各移動体の位置と、前記各移動体の実際の位置との差に基づいて報酬が付与されるよう設定された環境において、深層強化学習が行われたモデルであってもよい。
【0008】
上記の一態様において、前記第2の状態情報は、前記各移動体の未来の時点の位置と加速度データとを含んでもよい。
【0009】
上記の一態様において、前記敵対的生成ネットワークは、未来の異なる時点の前記各移動体の位置を示す複数の画像を出力し、前記第2の状態情報は、前記複数の画像に示される異なる時点の前記各移動体の位置から算出された未来の時点の前記加速度データを含んでもよい。
【0010】
上記目的を達成するための本開示の他の一態様は、所定エリア内を自律的に走行可能な複数の移動体を制御する群制御方法であって、前記移動体に備えられたセンサによって検出された加速度データを、各前記移動体について取得し、前記各移動体の現在の位置を推定し、前記各移動体の前記加速度データと推定された前記位置とを含む第1の状態情報と、前記各移動体の未来の状態を表す第2の状態情報とを、深層強化学習モデルに入力し、前記深層強化学習モデルからの出力に基づいて前記各移動体の行動を制御する処理を繰り返し実行し、前記深層強化学習モデルに入力される前記第2の状態情報は、敵対的生成ネットワークに、シード情報を入力して得られる出力を用いて予測された前記各移動体の未来の状態を表し、前記シード情報は、前回の前記処理において前記深層強化学習モデルから出力された情報を含む群制御方法である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
24日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
27日前
スター精密株式会社
工作機械
1か月前
株式会社ダイフク
搬送車
27日前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
24日前
トヨタ自動車株式会社
工作機械の制御装置
26日前
トヨタ自動車株式会社
工作機械の制御装置
25日前
株式会社ダイフク
物品搬送設備
25日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
株式会社やまびこ
走行制御装置
12日前
株式会社タブチ
減圧弁
6日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
トヨタ自動車株式会社
自律走行装置
1か月前
株式会社ダイヘン
搬送車
24日前
株式会社ダイヘン
搬送車
24日前
株式会社ダイヘン
搬送車
24日前
株式会社ダイヘン
搬送車
24日前
チームラボ株式会社
走行システム及び走行路
1か月前
井関農機株式会社
作業車両
20日前
ローム株式会社
半導体装置
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
株式会社デンソー
診断装置
10日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ