TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025051759
公報種別
公開特許公報(A)
公開日
2025-04-04
出願番号
2024164463
出願日
2024-09-20
発明の名称
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
出願人
三共木工株式会社
代理人
個人
主分類
G05D
1/222 20240101AFI20250327BHJP(制御;調整)
要約
【課題】遠隔操作対象を移動させる場合、適任な遠隔操作装置が適切に遠隔操作対象を遠隔操作する。
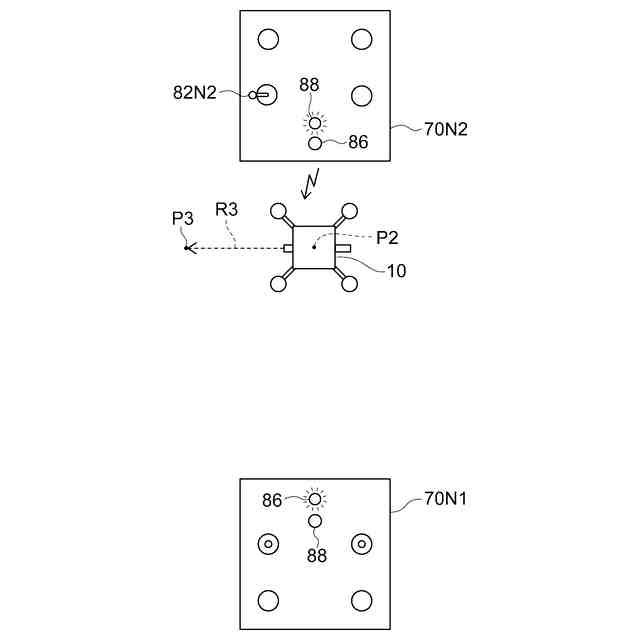
【解決手段】遠隔操作対象と、前記遠隔操作対象を選択的に操作する複数の遠隔操作装置と、を備える遠隔操作システムであって、前記複数の遠隔に操作装置の中の第1の遠隔操作装置から第2の遠隔操作装置に向かって、左側又に右側に前記遠隔操作対象を移動させる場合、前記第1の遠隔操作装置は、前記遠隔操作対象を、前記第1の遠隔操作装置から前記遠隔操作対象を見た場合の左方向又は右方向へ移動するように操作し、前記第2の遠隔操作装置は、前記遠隔操作対象を、前記第2の遠隔操作装置から前記遠隔操作対象を見た場合の右方向又は左方法へ移動するように操作する。
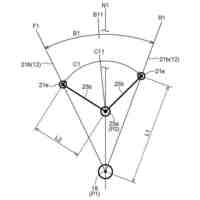
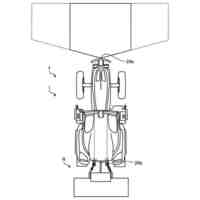
【選択図】図17
特許請求の範囲
【請求項1】
遠隔操作対象と、
前記遠隔操作対象を選択的に操作する複数の遠隔操作装置と、
を備える遠隔操作システムであって、
前記複数の遠隔操作装置の中の第1の遠隔操作装置から第2の遠隔操作装置に向かって、左側又に右側に前記遠隔操作対象を移動させる場合、
前記第1の遠隔操作装置は、前記遠隔操作対象を、前記第1の遠隔操作装置から前記遠隔操作対象を見た場合の左方向又は右方向へ移動するように操作し、
前記第2の遠隔操作装置は、前記遠隔操作対象を、前記第2の遠隔操作装置から前記遠隔操作対象を見た場合の右方向又は左方法へ移動するように操作する、
遠隔操作システム。
続きを表示(約 1,900 文字)
【請求項2】
遠隔操作対象と、
前記遠隔操作対象を選択的に操作する複数の遠隔操作装置と、
を備える遠隔操作システムであって、
前記複数の遠隔操作装置の中の第1の遠隔操作装置側から第2の遠隔操作装置側に向かって前記遠隔操作対象を近づける又は遠ざける場合、
前記第1の遠隔操作装置は、前記遠隔操作対象を、前進又は後退するように操作し、
前記第2の遠隔操作装置は、前記遠隔操作対象を、後退又は前進するように操作する、
遠隔操作システム。
【請求項3】
前記第1の遠隔操作装置は、前記遠隔操作対象を操作する場合、前記第1の遠隔操作装置が前記遠隔操作対象の操作を支配することを示す第1の支配指示信号を、前記遠隔操作対象に予め送信し、
前記第2の遠隔操作装置は、前記遠隔操作対象を操作する場合、前記第2の遠隔操作装置が前記遠隔操作対象の操作を支配することを示す第2の支配指示信号を、前記遠隔操作対象に予め送信する、
請求項1又は請求項2に記載の遠隔操作システム。
【請求項4】
前記複数の遠隔操作装置の各々は、前記遠隔操作対象を操作するための操作信号と、前記遠隔操作対象の操作を支配する支配指示信号とを、前記遠隔操作対象に送信し、
前記遠隔操作対象は、前記複数の遠隔操作装置の中の前記操作を支配しようとする支配遠隔操作装置から支配指示信号を受信した場合、前記複数の遠隔操作装置の中の前記支配遠隔操作装置以外の他の遠隔操作装置からの操作信号を無視する、
請求項1又は請求項2に記載の遠隔操作システム。
【請求項5】
前記遠隔操作対象は、前記支配遠隔操作装置から支配指示信号を受信した場合、前記支配遠隔操作装置が前記遠隔操作対象を支配することを示す支配完了信号を、少なくとも前記支配遠隔操作装置に送信する、
請求項4に記載の遠隔操作システム。
【請求項6】
前記支配遠隔操作装置は、前記支配完了信号を受信した場合、前記支配遠隔操作装置が前記遠隔操作対象の操作を支配していることを報知する報知部を備える、請求項5に記載の遠隔操作システム。
【請求項7】
前記遠隔操作対象は、前記支配遠隔操作装置から支配指示信号を受信した場合、前記支配遠隔操作装置が前記遠隔操作対象を支配していることを報知する報知部を備える、請求項4に記載の遠隔操作システム。
【請求項8】
遠隔操作対象を選択的に操作する複数の遠隔操作装置の中の遠隔操作装置であって、
当該遠隔操作装置は、前記遠隔操作対象を操作するための操作信号と、前記遠隔操作対象の操作を支配する支配指示信号とを、前記遠隔操作対象に送信し、
前記複数の遠隔操作装置の中の第1の遠隔操作装置から第2の遠隔操作装置に向かって左側又は右側に前記遠隔操作対象を移動させる場合、当該遠隔操作装置は、前記支配指示信号を送信した後、前記遠隔操作対象に対し、前記操作信号として、(1)前記第1の遠隔操作装置の場合、左側移動指示信号又は右側移動指示信号を送信し、(2)前記第2の遠隔操作装置の場合、右側移動指示信号又は左側移動指示信号を送信する、
遠隔操作装置。
【請求項9】
遠隔操作対象を選択的に操作する複数の遠隔操作装置の中の遠隔操作装置であって、
当該遠隔操作装置は、前記遠隔操作対象を操作するための操作信号と、前記遠隔操作対象の操作を支配する支配指示信号とを、前記遠隔操作対象に送信し、
前記遠隔操作対象を前記複数の遠隔操作装置の中の第1の遠隔操作装置から第2の遠隔操作装置に近づけ又は遠ざける場合、当該遠隔操作装置は、前記支配指示信号を送信した後、前記遠隔操作対象に対し、前記操作信号として、(1)前記第1の遠隔操作装置の場合、前進指示信号又は後退指示信号を送信し、(2)前記第2の遠隔操作装置の場合、後退指示信号又は前進指示信号を送信する、
遠隔操作装置。
【請求項10】
複数の遠隔操作装置により選択的に操作される遠隔操作対象であって、
前記複数の遠隔操作装置の中の第1の遠隔操作装置により、前記第1の遠隔操作装置から前記遠隔操作対象を見た左方向又は右方向へ移動するように操作された場合、左方向又は右方向へ移動し、
前記複数の遠隔操作装置の中の第2の遠隔操作装置により、前記第2の遠隔操作装置から前記遠隔操作対象を見た右方向又は左方向へ移動するように操作された場合、当該右方向又は当該左方向へ移動する、
遠隔操作対象。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔操作システム、遠隔操作装置、及び遠隔操作対象に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
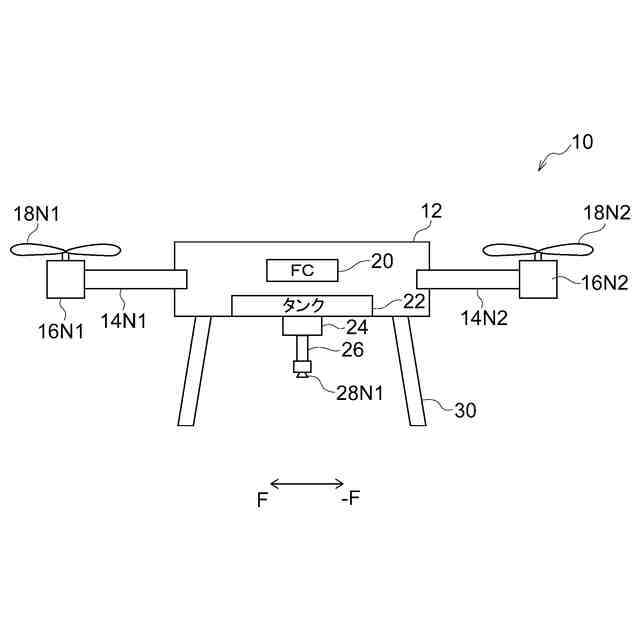
特許文献1には、使用者の操作により遠隔操作装置(その他、操作器、プロポ、送信機等とも言う)がドローンに指令信号を送信し、ドローンを飛行させることが開示される。また、特許文献2には、ドローンにより圃場に農薬散布をすることが開示される。
【0003】
使用者が遠隔操作装置を操作してドローンにより圃場に農薬散布をする場合、使用者は、圃場の一方の端に位置し、他方の端には、ドローンが当該他方の端を通過しないように、ドローンを監視する監視者が配置される。使用者は、圃場の一方の端から他方の端に向かう往路において、ドローンを前進飛行させると共に農薬を散布させる。ドローンが他方の端に近づくと、監視者は、ドローンが他方の端に近づいたことを、無線により使用者に知らせる。ドローンが他方の端に近づいたことが知らされた使用者は、圃場の他方の端から一方の端に向かうように、復路においてドローンを後退飛行させる。
【先行技術文献】
【特許文献】
【0004】
特開2023-081814
特開2022-088441
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように監視者が使用者にドローンが他方の端に近づいたことを知らせる場合、ドローンの飛行速度又はドローンへの追い風等の影響により、ドローンが他方の端を通過してしまう場合もある。
【0006】
また、監視者がいない場合、使用者が、圃場の一方の端と他方の端との間をドローンと共に往復することも考えられる。
【0007】
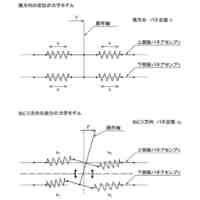
例えば、一方の端から移動開始したドローンが他方の端に到達する前に、使用者が他方の端に到達することもある。この場合、一方の端から他方の端に向かって左側にドローンを移動させる場合、他方の端にいる使用者は、ドローンを、ドローンに向かって右側に移動させたいと思うが、遠隔操作装置を、ドローンを左に移動するように、操作する必要があり、違和感がある。この場合、使用者が、遠隔操作装置を、ドローンを右に移動するように操作すると、一方の端から他方の端に向かって右側にドローンは移動し、ドローンを適切に操作することができない。
【0008】
本開示の技術は、上記事実に鑑み成されたもので、遠隔操作対象を移動させる場合、適任な遠隔操作装置が遠隔操作対象を違和感なく適切に遠隔操作することができる遠隔操作システム、遠隔操作装置、及び遠隔操作対象を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的達成のため第1の態様は、遠隔操作対象と、前記遠隔操作対象を選択的に操作する複数の遠隔操作装置と、を備える遠隔操作システムであって、前記複数の遠隔に操作装置の中の第1の遠隔操作装置から第2の遠隔操作装置に向かって、左側又に右側に前記遠隔操作対象を移動させる場合、前記第1の遠隔操作装置は、前記遠隔操作対象を、前記第1の遠隔操作装置から前記遠隔操作対象を見た場合の左方向又は右方向へ移動するように操作し、前記第2の遠隔操作装置は、前記遠隔操作対象を、前記第2の遠隔操作装置から前記遠隔操作対象を見た場合の右方向又は左方法へ移動するように操作する。
【0010】
第2の態様は、遠隔操作対象と、前記遠隔操作対象を選択的に操作する複数の遠隔操作装置と、を備える遠隔操作システムであって、前記複数の遠隔操作装置の中の第1の遠隔操作装置側から第2の遠隔操作装置側に向かって前記遠隔操作対象を近づける又は遠ざける場合、前記第1の遠隔操作装置は、前記遠隔操作対象を、前進又は後退するように操作し、前記第2の遠隔操作装置は、前記遠隔操作対象を、後退又は前進するように操作する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三共木工株式会社
遠隔操作システム、遠隔操作装置、及び遠隔操作対象
1か月前
エイブリック株式会社
基準電圧回路
26日前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
29日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
29日前
エイブリック株式会社
ボルテージレギュレータ
26日前
トヨタ自動車株式会社
工作機械の制御装置
28日前
トヨタ自動車株式会社
工作機械の制御装置
27日前
株式会社ダイフク
物品搬送設備
27日前
株式会社やまびこ
走行制御装置
14日前
株式会社タブチ
減圧弁
8日前
株式会社ダイヘン
搬送車
26日前
株式会社ダイヘン
搬送車
26日前
株式会社ダイヘン
搬送車
26日前
株式会社ダイヘン
搬送車
26日前
井関農機株式会社
作業車両
22日前
株式会社デンソー
診断装置
12日前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
29日前
ローム株式会社
バイアス回路
28日前
FCLコンポーネント株式会社
電源回路および検出装置
8日前
株式会社マキタ
作業ロボット
14日前
ファナック株式会社
機械プログラミング方法
4日前
ダイハツ工業株式会社
無人搬送車の制御方法
27日前
岩井ファルマテック株式会社
監査証跡の管理システム
1か月前
ローム株式会社
電源起動監視回路
27日前
ファナック株式会社
工作機械の迅速な移動計画
4日前
ローム株式会社
レギュレータ回路
1か月前
株式会社TMEIC
リモートI/Oステーション
1か月前
株式会社マキタ
自律移動システム
14日前
新電元工業株式会社
レギュレータ回路及びインバータ回路
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ