TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025063555
公報種別
公開特許公報(A)
公開日
2025-04-16
出願番号
2023172869
出願日
2023-10-04
発明の名称
台車
出願人
デュプロ精工株式会社
代理人
個人
,
個人
主分類
B62B
3/02 20060101AFI20250409BHJP(鉄道以外の路面車両)
要約
【課題】荷台の角度を一定に保ちながら、周囲環境や路面状態に影響されることなく自在に走行可能な台車を提供すること。
【解決手段】
台車が、荷台と、少なくとも4つの車輪を含み荷台を第1方向に移動可能に構成された走行ユニットと、支持ユニットと、支持ユニットおよび走行ユニットを制御可能な制御装置とを備える。支持ユニットは、荷台および走行ユニットの間に設けられ、荷台に対して走行ユニットの車輪を第1方向に交差する第2方向に沿って移動可能かつ荷台に対する第2方向の所定位置で保持可能に構成されている。制御装置は、荷台の水平方向に対する傾きおよび少なくとも4つの車輪の各々にかかる荷重を取得可能に構成されていると共に、取得された荷台の傾きおよび荷重に基づいて支持ユニットを制御して、車輪を接地させつつ、荷台を所定角度で保持可能に構成されている。
【選択図】図9
特許請求の範囲
【請求項1】
荷台と、
少なくとも4つの車輪を含み、前記荷台を第1方向に移動可能に構成された走行ユニットと、
前記荷台および前記走行ユニットの間に設けられ、前記荷台に対して前記走行ユニットの前記車輪を前記第1方向に交差する第2方向に沿って移動可能かつ前記荷台に対する前記第2方向の所定位置で保持可能に構成された支持ユニットと、
前記支持ユニットおよび前記走行ユニットを制御可能な制御装置と
を備え、
前記制御装置は、
前記荷台の水平方向に対する傾きおよび少なくとも4つの前記車輪の各々にかかる荷重を取得可能に構成されていると共に、
取得された前記荷台の傾きおよび前記荷重に基づいて前記支持ユニットを制御して、前記車輪を接地させつつ、前記荷台を所定角度で保持可能に構成されている、台車。
続きを表示(約 680 文字)
【請求項2】
前記走行ユニットが、前記車輪からの衝撃を吸収可能な衝撃吸収部を含む、請求項1に記載の台車。
【請求項3】
前記走行ユニットが、前記車輪を前記第2方向に沿って延びる回転軸まわりに回転させることが可能な転舵部を含み、
前記制御装置は、前記転舵部を制御して、前記車輪の側面が取得された前記荷台の傾き方向に対して交差するように前記車輪を回転可能に構成されている、請求項1に記載の台車。
【請求項4】
前記制御装置は、
取得された前記荷重に基づいて前記荷台上の荷物の荷重分布を算出し、算出された前記荷重分布に基づいて前記荷物が偏荷重であるか否かを判定し、
前記荷物が偏荷重であると判定されると、前記支持ユニットを制御して、前記荷物の重心を前記荷台の中心に接近可能に構成されている、請求項1に記載の台車。
【請求項5】
前記制御装置は、
取得された前記荷重が所定値未満の第1荷重であり、前記第1荷重が取得された後に取得された前記荷重である第2荷重が前記第1荷重よりも小さい場合、前記走行ユニットを制御して、前記荷台の移動を停止または減速させる、または、前記荷台を現在の移動方向とは異なる方向に移動させる、請求項1に記載の台車。
【請求項6】
前記制御装置は、
取得された前記荷重が所定値未満である場合、取得される前記荷重が所定値以上となるまで前記支持ユニットを制御して、前記車輪を前記第2方向に沿って移動させる、請求項1~5のいずれかに記載の台車。
発明の詳細な説明
【技術分野】
【0001】
本開示は、台車に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、荷台の水平制御方法を開示する。特許文献1の方法は、車輪毎の荷台本体および車軸間の距離の水平補正値と、車輪毎の車輪の前方の床面の凹凸部の高さとから求められる各車輪のシリンダのロッドの移動量に応じて、各シリンダを上昇または下降駆動するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開平9-315127号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の方法は、荷台の角度を一定に保ちながら、周囲環境や路面状態に影響されることなく自在に走行するという点において、改善の余地がある。
【0005】
本開示は、荷台の角度を一定に保ちながら、周囲環境や路面状態に影響されることなく自在に走行可能な台車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様の台車は、
荷台と、
少なくとも4つの車輪を含み、前記荷台を第1方向に移動可能に構成された走行ユニットと、
前記荷台および前記走行ユニットの間に設けられ、前記荷台に対して前記走行ユニットの前記車輪を前記第1方向に沿って移動可能かつ前記荷台に対する前記第1方向に交差する第2方向の所定位置で保持可能に構成された支持ユニットと、
前記支持ユニットおよび前記走行ユニットを制御可能な制御装置と
を備え、
前記制御装置は、
前記荷台の水平方向に対する傾きおよび少なくとも4つの前記車輪の各々にかかる荷重を取得可能に構成されていると共に、
取得された前記荷台の傾きおよび前記荷重に基づいて前記支持ユニットを制御して、前記車輪を接地させつつ、前記荷台を所定角度で保持可能に構成されている。
【発明の効果】
【0007】
本開示によれば、荷台の角度を一定に保ちながら、周囲環境や路面状態に影響されることなく自在に走行可能な台車を実現できる。
【図面の簡単な説明】
【0008】
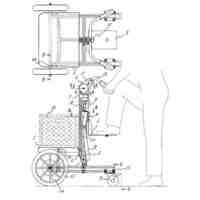
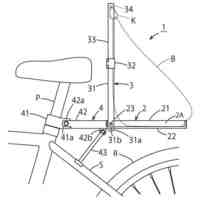
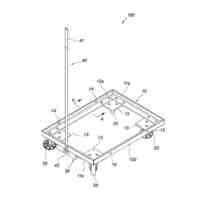
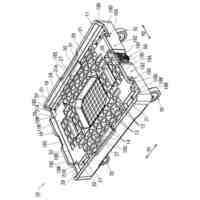
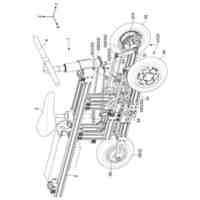
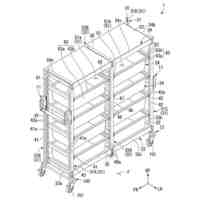
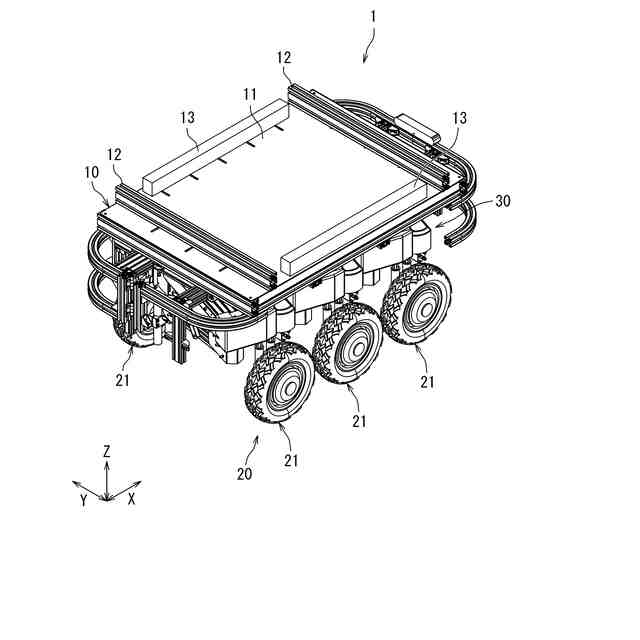
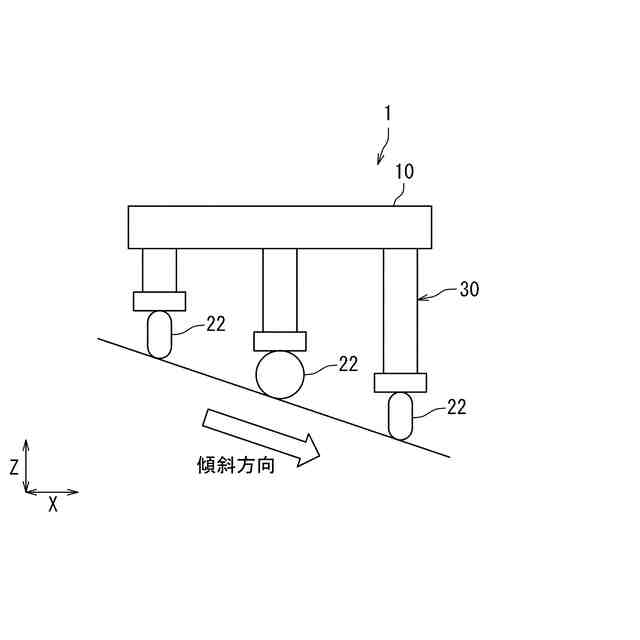
本開示の一態様の台車を示す斜視図。
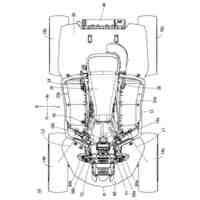
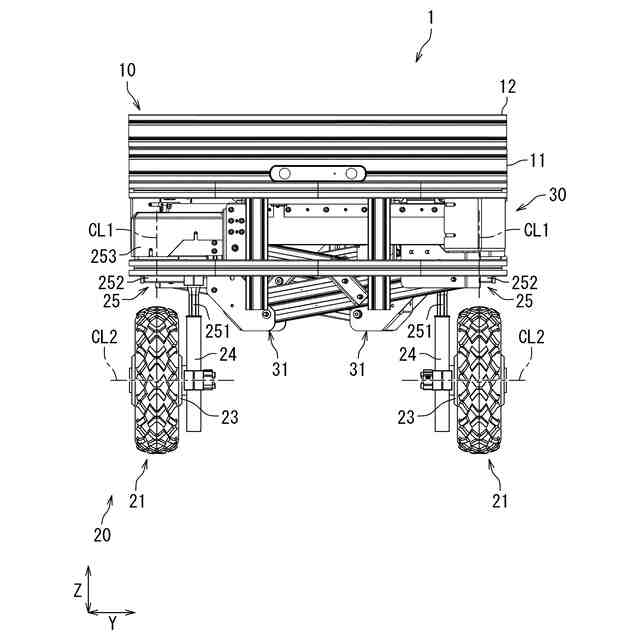
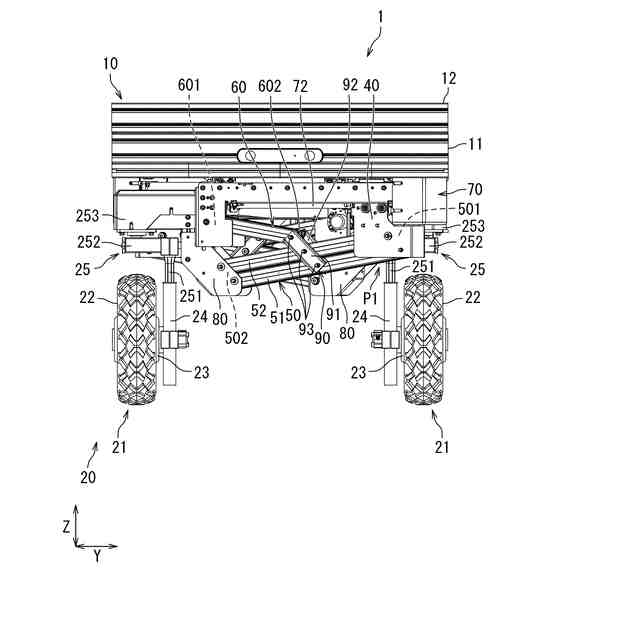
図1の台車の正面図。
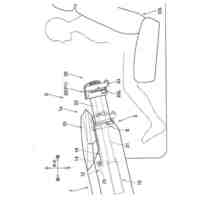
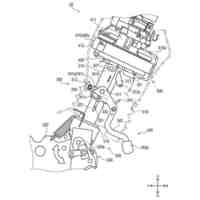
図1の台車の部分背面図。
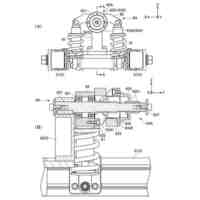
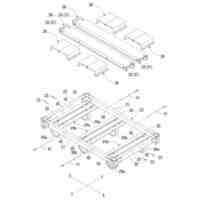
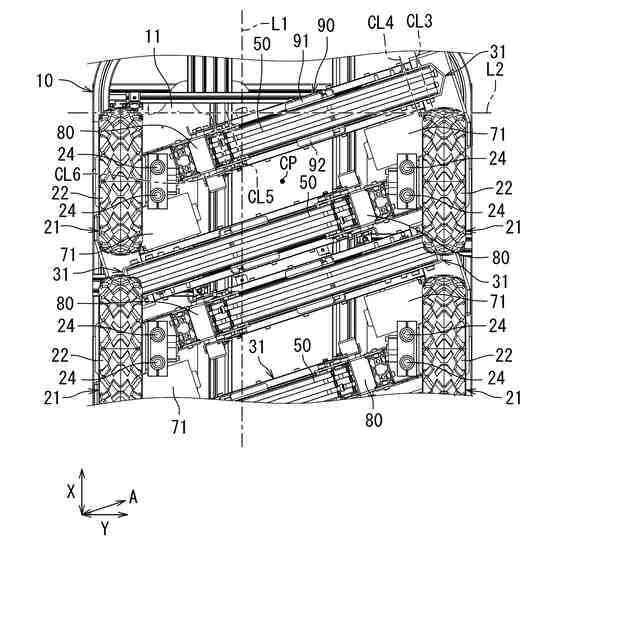
図1の台車の部品を一部取り除いた状態の正面図。
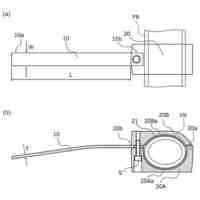
図1の台車の支持ユニットを説明するための模式図。
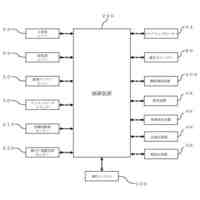
図1の台車のブロック図。
図1の台車で実施可能な制御の一例を説明するための第1の図。
図1の台車で実施可能な制御の一例を説明するための第2の図。
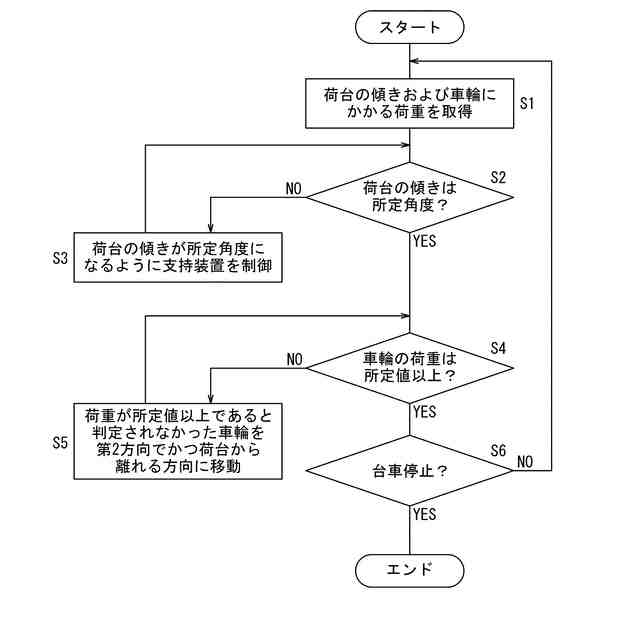
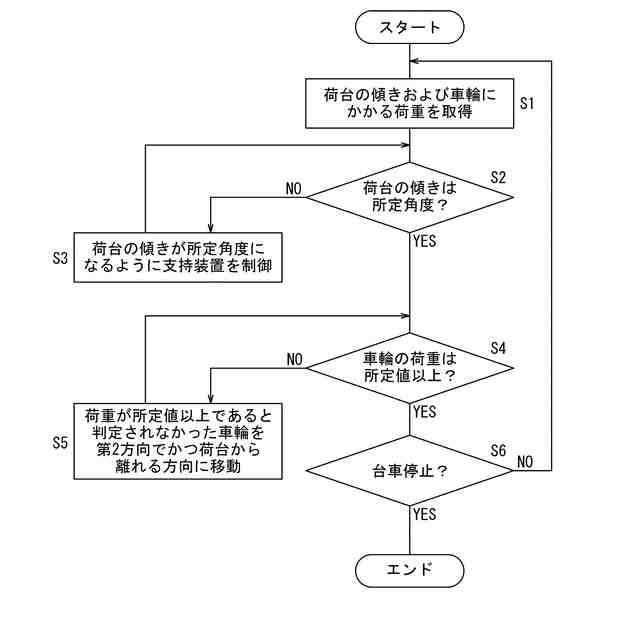
図1の台車の移動制御処理の一例を説明するためのフローチャート。
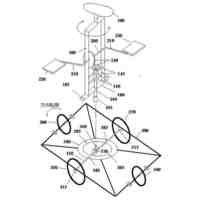
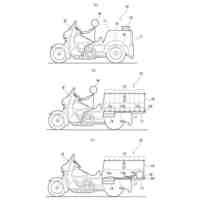
図1の台車の変形例を説明するための第1の図。
図1の台車の変形例を説明するための第2の図。
図1の台車の変形例を説明するための第3の図。
【発明を実施するための形態】
【0009】
以下、本開示の一例を添付図面に従って説明する。以下の説明は、本質的に例示に過ぎず、本開示、本開示の適用物、または、本開示の用途を制限することを意図するものではない。添付図面は模式的なものであり、各寸法の比率等は現実のものとは必ずしも合致していない。
【0010】
本開示の一態様の台車1は、図1に示すように、荷台10と、走行ユニット20と、支持ユニット30とを備える。走行ユニット20は、荷台10を第1方向(例えば、X方向)に移動可能に構成されている。第1方向Xは、一例として、水平方向である。支持ユニット30は、荷台10および走行ユニット20の間に設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発音装置
1か月前
個人
折り畳み自転車
5か月前
個人
電動モビリティ
2か月前
個人
自転車用傘捕捉具
6か月前
個人
体重掛けリフト台車
5か月前
個人
自由方向乗車自転車
2か月前
個人
自転車用荷台
9か月前
個人
アタッチメント
6か月前
個人
キャンピングトライク
3か月前
個人
自転車用荷物台
5か月前
井関農機株式会社
作業車両
11か月前
個人
ステアリングの操向部材
8か月前
個人
スライドレインプルーフ
11か月前
株式会社クラベ
面状ユニット
11か月前
個人
ステアリングの操向部材
3か月前
株式会社CPM
駐輪機
6か月前
祖峰企画株式会社
平台車
10か月前
三甲株式会社
台車
8か月前
帝人株式会社
車両構造体
11か月前
三甲株式会社
台車
8か月前
株式会社三五
リアサブフレーム
5か月前
豊田合成株式会社
操舵装置
6か月前
学校法人千葉工業大学
車両
4か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ダイハツ工業株式会社
車両
7か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
個人
足踏みペダル式自転車
11か月前
株式会社オカムラ
搬送用什器
2か月前
アルインコ株式会社
運搬台車
11か月前
アルインコ株式会社
運搬台車
11か月前
個人
自転車の駐輪場システム
11日前
株式会社クボタ
作業車
9か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ