TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025064055
公報種別
公開特許公報(A)
公開日
2025-04-17
出願番号
2023173473
出願日
2023-10-05
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
50/02 20120101AFI20250410BHJP(車両一般)
要約
【課題】自動運転の再開を選択するか否かを判断する技術を提供する。
【解決手段】制御装置は、移動体が自動運転により走行している場合、移動体についての異常停止を含む異常状態の発生を検出する検出部と、異常状態の発生が検出された場合であって、あらかじめ定められた第1条件が満たされる場合に、移動体について自動運転を再開させる制御を行い、第1条件が満たされない場合に、自動運転を再開させる制御を行わない、制御部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
自動運転により走行可能な移動体の動作を制御する制御装置であって、
前記移動体が自動運転により走行している場合、前記移動体についての異常停止を含む異常状態の発生を検出する検出部と、
前記異常状態の発生が検出された場合であって、あらかじめ定められた第1条件が満たされる場合に、前記移動体について前記自動運転を再開させる制御を行い、
前記第1条件が満たされない場合に、前記自動運転を再開させる制御を行わない、制御部と、
を備える、
制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記移動体は、
前記移動体に乗車した運転者が前記移動体に設けられた運転者入力装置を操作することにより、前記移動体が走行する有人運転モードと、
前記移動体とは異なる場所に設けられたオペレータ入力装置をオペレータが操作することにより生成された前記移動体の走行動作を規定する走行条件を受信することにより、前記運転者が前記移動体に乗車することなく、前記移動体が走行する遠隔手動運転モードと、
前記制御装置によって生成された前記走行条件を受信することにより、前記運転者入力装置と前記オペレータ入力装置とのいずれも操作されることなく前記移動体が走行する遠隔自動運転モードと、
を有し、
前記制御部は、
前記異常状態の発生が検出された場合であって、前記第1条件が満たされる場合に、前記移動体の運転モードを前記遠隔自動運転モードのまま、前記自動運転を再開させる制御を行い、
前記第1条件が満たされない場合に、前記遠隔自動運転モードにおける前記自動運転を再開させる制御を行わない、
制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記制御部は、前記異常状態の発生が検出された場合であって、前記第1条件が満たれず、かつ、あらかじめ定められた第2条件が満たされる場合に、前記移動体の運転モードを前記遠隔自動運転モードから前記遠隔手動運転モードに切り替える、
制御装置。
【請求項4】
請求項3に記載の制御装置であって、
前記第1条件は、前記自動運転の再開に要する時間があらかじめ定められた制限時間内であること、を含む、
制御装置。
【請求項5】
請求項3に記載の制御装置であって、
前記第1条件は、前記移動体および前記異常状態が発生している他の移動体を合わせた数が、値M(Mが2以上の整数)以下であること、を含む、
制御装置。
【請求項6】
請求項3に記載の制御装置であって、
前記第1条件は、前記移動体および前記自動運転で走行している他の移動体を合わせた数が、値N(Nは2以上の整数)以下であること、を含む、
制御装置。
【請求項7】
請求項3に記載の制御装置であって、
前記第1条件は、前記移動体の現在位置があらかじめ定められた領域内にあること、を含む
制御装置。
【請求項8】
請求項7に記載の制御装置であって、
前記あらかじめ定められた領域は、前記自動運転において走行している他の前記移動体が停車する頻度が低い領域、前記移動体について設定されている計画ルートから前記移動体が外れた距離があらかじめ決められた距離以内となる領域、前記オペレータ入力装置を操作できる位置および姿勢を取っている前記オペレータが前記移動体を確認できる領域、のうちのいずれか、である、
制御装置。
【請求項9】
請求項3に記載の制御装置であって、
前記第1条件は、前記移動体に搭載されているヨーレートセンサが故障していないこと、を含む、
制御装置。
【請求項10】
請求項3に記載の制御装置であって、
前記第1条件は、前記移動体が、前記移動体について設定されている計画ルートから外れて走行する必要がないこと、を含む、
制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 6,400 文字)
【背景技術】
【0002】
特許文献1には、遠隔制御によって自動運転される車両について記載されている。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動運転で走行している車両等の移動体において何らかの不具合が生じて、移動体が停止した場合には、自動運転をやめて、オペレータが入力装置を操作することにより遠隔から移動体の運転操作を行い、移動体を走行させることができる。しかしながら、移動体の自動運転を再開させることが望ましい場合もある。オペレータによる遠隔からの運転操作と、自動運転の再開とのいずれを選択するかを判断する技術が望まれていた。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一の形態によれば、制御装置が提供される。この制御装置は、自動運転により走行可能な移動体の動作を制御する制御装置である。この制御装置は、前記移動体が自動運転により走行している場合、前記移動体についての異常停止を含む異常状態の発生を検出する検出部と、前記異常状態の発生が検出された場合であって、あらかじめ定められた第1条件が満たされる場合に、前記移動体について前記自動運転を再開させる制御を行い、前記第1条件が満たされない場合に、前記自動運転を再開させる制御を行わない、制御部と、を備える。
この形態の制御装置によれば、自動運転の再開を選択できるかの判別が容易である。
(2)上記形態の制御装置において、前記移動体は、前記移動体に乗車した運転者が前記移動体に設けられた運転者入力装置を操作することにより、前記移動体が走行する有人運転モードと、前記移動体とは異なる場所に設けられたオペレータ入力装置をオペレータが操作することにより生成された前記移動体の走行動作を規定する走行条件を受信することにより、前記運転者が前記移動体に乗車することなく、前記移動体が走行する遠隔手動運転モードと、前記制御装置によって生成された前記走行条件を受信することにより、前記運転者入力装置と前記オペレータ入力装置とのいずれも操作されることなく前記移動体が走行する遠隔自動運転モードと、を有し、前記制御部は、前記異常状態の発生が検出された場合であって、前記第1条件が満たされる場合に、前記移動体の運転モードを前記遠隔自動運転モードのまま、前記自動運転を再開させる制御を行い、前記第1条件が満たされない場合に、前記遠隔自動運転モードにおける前記自動運転を再開させる制御を行わなくてもよい。
この形態の制御装置によれば、遠隔自動運転モードにおける自動運転の再開を選択できるかの判別が容易である。
(3)上記形態の制御装置において、前記制御部は、前記異常状態の発生が検出された場合であって、前記第1条件が満たれず、かつ、前記第2条件が満たされる場合に、前記移動体の運転モードを前記遠隔自動運転モードから前記遠隔手動運転モードに切り替えてもよい。
この形態の制御装置によれば、遠隔自動運転モードから遠隔手動運転モードに切り替えることができるかの判別が容易である。
(4)上記形態の制御装置において、前記第1条件は、前記自動運転の再開に要する時間があらかじめ定められた制限時間内であること、を含んでもよい。
この形態の制御装置によれば、自動運転の再開に要する時間に基づいて、遠隔自動運転モードにおける自動運転の再開を選択できるかを容易に判別できる。
(5)上記形態の制御装置において、前記第1条件は、前記移動体および前記異常状態が発生している他の移動体を合わせた数が、値M(Mが2以上の整数)以下であること、を含んでもよい。
この形態の制御装置によれば、異常状態が発生している移動体の数に応じて、自動運転の再開を選択できるかを容易に判別できる。
(6)上記形態の制御装置において、前記第1条件は、前記移動体および前記自動運転で走行している他の移動体を合わせた数が、値N(Nは2以上の整数)以下であること、を含んでもよい。
この形態の制御装置によれば、自動運転で走行している移動体の数に応じて、自動運転の再開を選択できるかを容易に判別できる。
(7)上記形態の制御装置において、前記第1条件は、前記移動体の現在位置があらかじめ定められた領域内にあること、を含んでもよい。
この形態の制御装置によれば、移動体の現在位置に応じて、自動運転の再開を選択できるかを容易に判別できる。
(8)上記形態の制御装置において、前記あらかじめ定められた領域は、前記自動運転で走行している他の前記移動体が停車する頻度が低い領域、前記移動体について設定されている計画ルートから前記移動体が外れた距離があらかじめ決められた距離以内となる領域、前記オペレータ入力装置を操作できる位置および姿勢を取っている前記オペレータが前記移動体を確認できる領域、のうちのいずれか、であってもよい。
この形態の制御装置によれば、他の移動体の走行に与える影響、自動運転の再開のしやすさを考慮して、自動運転の再開を選択できるかを容易に判別できる。
(9)上記形態の制御装置において、前記第1条件は、前記移動体に搭載されているヨーレートセンサが故障していないこと、を含んでもよい。
この形態の制御装置によれば、自動運転に必要なヨーレートセンサが故障している場合には、自動運転の再開が選択されない。ヨーレートセンサの状態に応じて、自動運転の再開を選択できるかを判別できる。
(10)上記形態の制御装置において、前記第1条件は、前記移動体が、前記移動体について設定されている計画ルートから外れて走行する必要がないこと、を含んでもよい。
この形態の制御装置によれば、自動運転の再開後に移動体の正常な走行を保証するため、計画ルート外を走行する必要がある場合には、自動運転の再開が選択されない。移動体の状況に応じて、自動運転の再開を選択できるかを容易に判別できる。
(11)上記形態の制御装置において、前記第1条件は、前記移動体の周囲の天候が悪天候ではないこと、を含んでもよい。
この形態の制御装置によれば、自動運転の再開後の移動体の走行が困難となる恐れがある場合には、自動運転の再開が選択されない。天候に応じて、自動運転の再開を選択できるかを容易に判別できる。
(12)上記形態の制御装置において、前記第1条件は、前記移動体が前記制御装置と通信するための回線が開通していること、を含んでもよい。
この形態の制御装置によれば、移動体との通信が困難なため、自動運転の再開が選択されない。移動体の状況に応じて、自動運転の再開を選択できるかを容易に判別できる。
(13)上記形態の制御装置において、前記第2条件は、前記自動運転の再開に要する時間が前記制限時間を超えること、を含んでもよい。
この形態の制御装置によれば、自動運転の再開に時間が要する場合には、自動運転の再開が選択されない。移動体の状態に応じて、自動運転からから遠隔手動制御に切り替えることができるかを容易に判別できる。
(14)上記形態の制御装置において、前記第2条件は、前記移動体および前記異常状態が発生している他の移動体を合わせた数が前記Mを超えていること、を含んでもよい。
この形態の制御装置によれば、異常状態が発生している移動体の数が一定数を超えている場合に、対象の移動体の全てについて遠隔自動運転モードにおける自動運転を再開させることは困難なため、自動運転の再開が選択されない。異常状態が発生している移動体の数に応じて、自動運転から遠隔手動制御に切り替えることができるかを容易に判別できる。
(15)上記形態の制御装置において、前記第2条件は、前記移動体および前記自動運転で走行している他の移動体を合わせた数が、前記Nを超えていること、を含んでもよい。
この形態の制御装置によれば、遠隔自動運転モードにおいて走行している移動体の数に応じて、自動運転からから遠隔手動制御に切り替えることができるかを容易に判別できる。
(16)上記形態の制御装置において、前記第2条件は、前記移動体の前記現在位置が前記あらかじめ定められた領域内にないこと、を含んでもよい。
この形態の制御装置によれば、移動体の現在位置に応じて、自動運転からから遠隔手動制御に切り替えることができるかを容易に判別できる。
(17)上記形態の制御装置において、前記第2条件は、前記移動体に搭載されている前記ヨーレートセンサが故障していること、を含んでもよい。
この形態の制御装置によれば、ヨーレートセンサの状態に応じて、自動運転から遠隔手動制御に切り替えることができるかを容易に判別できる。
(18)上記形態の制御装置において、前記第2条件は、前記移動体が、前記移動体について設定されている前記計画ルートから外れて走行する必要があること、を含んでもよい。
この形態の制御装置によれば、計画ルートを走行する必要がある場合には、自動運転の再開後に移動体の正常な走行を保証するため、遠隔手動運転モードに切り替えられる。移動体の状況に応じて、自動運転から遠隔手動制御に切り替えることができるかを容易に判別できる。
(19)上記形態の制御装置において、前記第2条件は、前記移動体の周囲の天候が前記悪天候であること、を含んでもよい。
この形態の制御装置によれば、悪天降の場合、自動運転の再開後の移動体の走行が困難となるおそれがあるため、遠隔手動運転モードに切り替えられる。天候に応じて、自動運転から遠隔手動運転制御に切り替えることができるかを容易に判別できる。
(20)上記形態の制御装置において、前記第2条件は、前記移動体と前記制御装置との通信が途絶している状態があらかじめ定められた時間以上続いていること、を含んでもよい。
この形態の制御装置によれば、遠隔自動運転モードにおける自動運転が困難なため、遠隔手動運転モードに切り替えられる。移動体の状況に応じて、遠隔自動運転モードから遠隔手動運転モードに切り替えることができるかを容易に判別できる。
(21)上記形態の制御装置において、前記第2条件は、前記オペレータが前記オペレータ入力装置を操作できる位置および姿勢を取っていること、を含んでもよい。
この形態の制御装置によれば、オペレータが移動体の遠隔操作を行うことができる場合に、遠隔手動運転モードに切り替えられる。オペレータの状況に応じて、自動運転から遠隔手動制御に切り替えることができるかを容易に判別できる。
(22)上記形態の制御装置において、前記第1条件が満たされるか否かを判別し、前記第1条件が満たされない場合に、前記第2条件が満たされるか否かをさらに判別する判別部をさらに備えてもよい。
上記形態の制御装置において、まず、自動運転の再開が可能であるかが判別され、その後、遠隔手動運転モードにおける運転に切り替えるかが判別される。移動体20を遠隔操作するオペレータの数には限りがあるが、自動運転の再開について判別を優先的に行うことで、人的資源を効率的に管理できる。
(23)上記形態の制御装置において、前記判別部により前記第1条件および前記第2条件が満たされていないと判別された場合に、その旨を通知する通知部、をさらに備えてもよい。
上記形態の制御装置において、自動運転の再開も遠隔手動運転モードにおける運転も行うことができない場合には、その旨が通知されるので、別途の方法における対処を迅速に進めることができる。
(24)上記形態の制御装置において、前記移動体と前記制御装置との通信が途絶している状態があらかじめ定められた時間以上続いた場合に、その旨を通知する通知部、をさらに備えてもよい。
上記形態の制御装置において、遠隔自動運転モードにおける自動運転の再開も遠隔手動運転モードにおける運転も困難である場合、その旨が通知されるので、別途の方法における対処を迅速に進めることができる。
【0007】
なお、本開示は、種々の形態で実現することが可能であり、例えば、遠隔操作システム、移動体制御装置、遠隔自動運転方法、および、移動体の製造方法等の態様で実現することが可能である。
【図面の簡単な説明】
【0008】
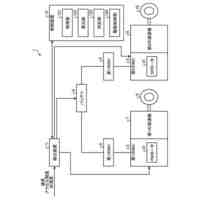
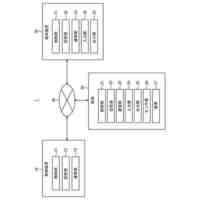
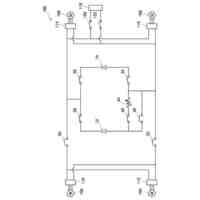
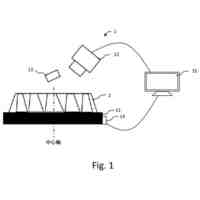
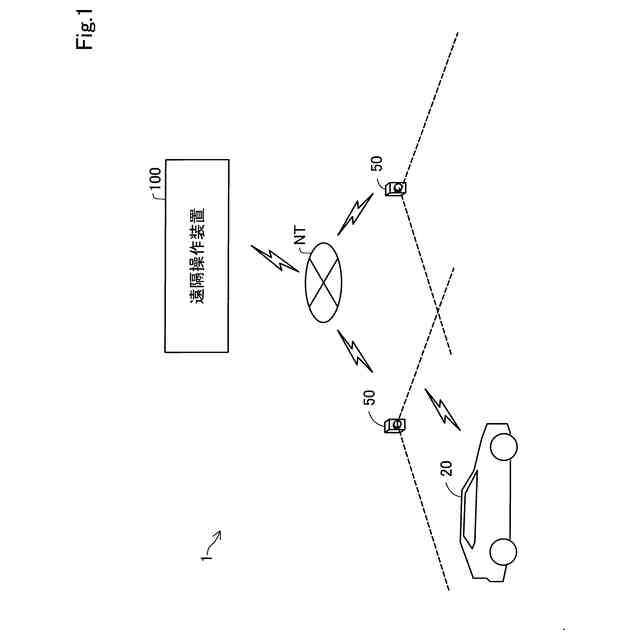
第1実施形態における遠隔操作システムの構成を示す説明図である。
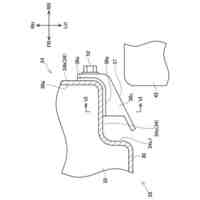
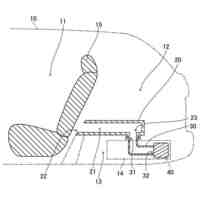
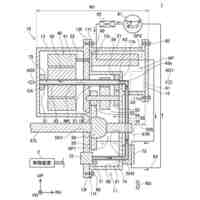
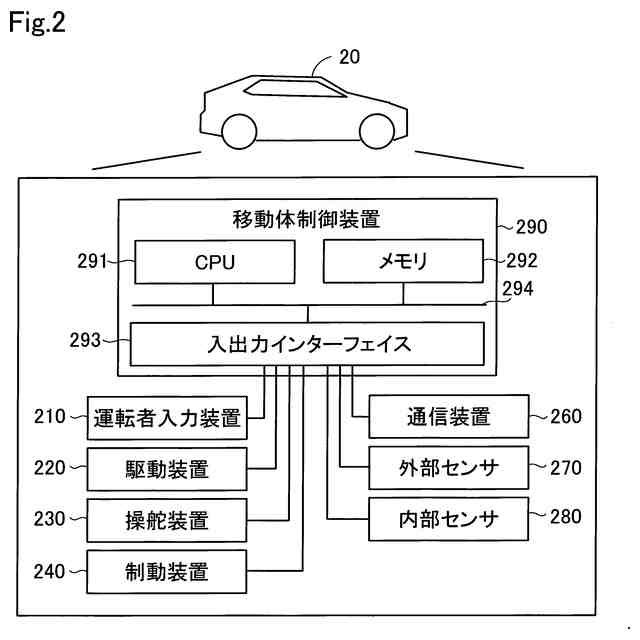
移動体の概要を示す模式図である。
遠隔操作装置の概要を示す模式図である。
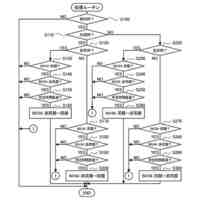
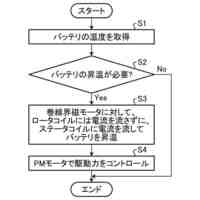
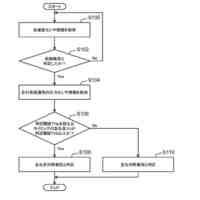
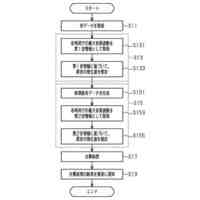
遠隔制御装置によって実現される車両の走行方法を示すフローチャート。
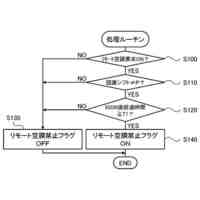
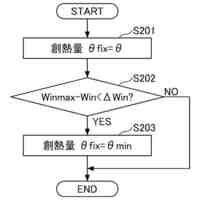
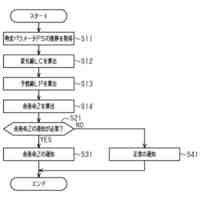
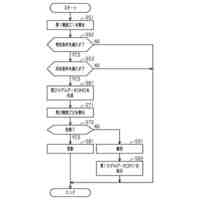
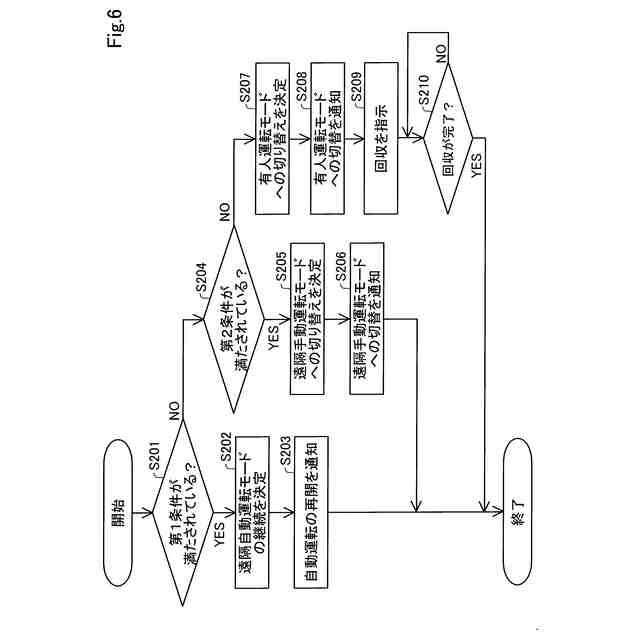
運転モードの切り替えについての判別処理を表すフローチャートである。
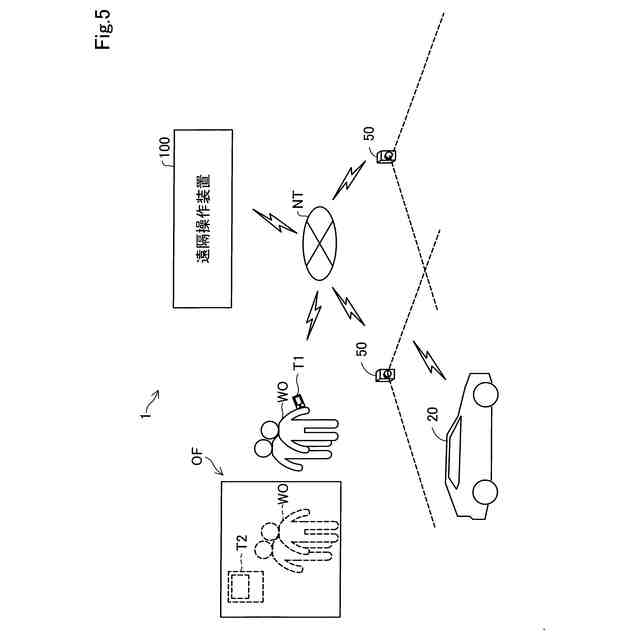
第2実施形態における遠隔操作システムの構成を示す説明図である。
第2実施形態における運転モードの切り替えの判別処理を表すフローチャートである。
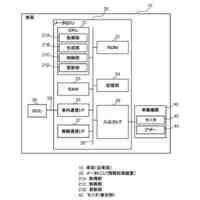
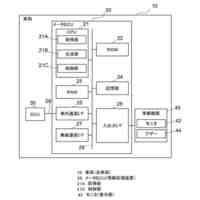
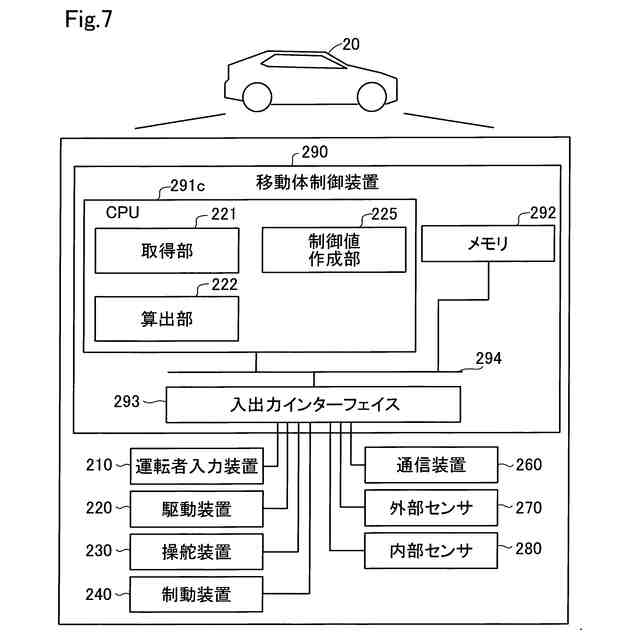
自律運転モードにおいて走行できる移動体の機能構成を示すブロック図である。
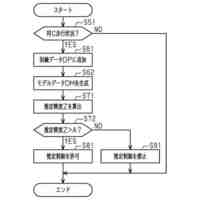
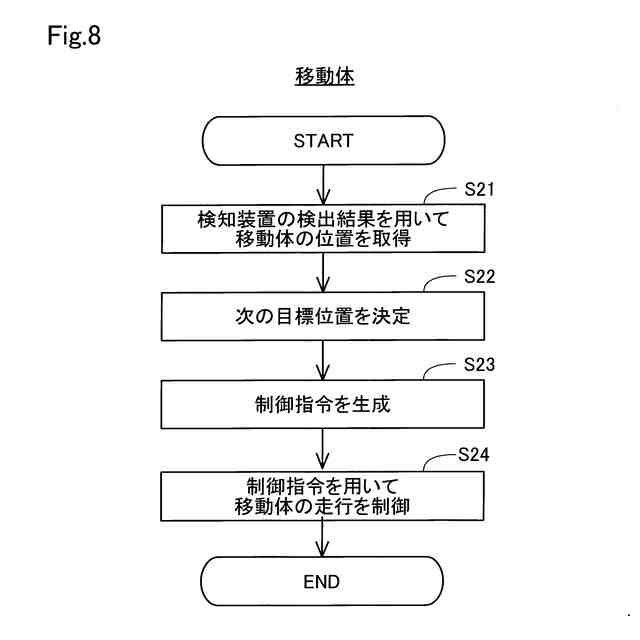
自律運転モードが設定された移動体の走行方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A1.遠隔操作システム構成:
図1は、第1実施形態における遠隔操作システム1の構成を示す説明図である。図2は、移動体20の概要を示す模式図である。図1に示す、遠隔操作システム1は、移動体20を生産する工場において用いられる。遠隔操作システム1の制御の対象は、遠隔操作によって走行可能な移動体20である。遠隔操作システム1は、移動体20の組み立て工程、検査工程等の移動体の製造過程で用いられる。遠隔操作システム1は、製造過程におけるあらかじ定められた搬送区間にわたって移動体20を搬送する。作業員あるいは設備によって、搬送中の移動体20に対して組み立て、検査等の処理が行われる。
【0010】
本実施形態では、移動体20は、自動運転により走行可能な電気自動車(BEV:Battery Electric Vehicle)である。「無人運転」とは、移動体20に乗車した運転者の運転操作によらない運転を意味する。運転操作とは、車両の「走る」、「曲がる」、「止まる」の少なくともいずれかに関する操作を意味する。自動運転は、移動体20の外部に設けられた装置を用いた自動・手動の遠隔制御、または、移動体20の自律制御によって実現される。自動運転によって走行している移動体20には、運転操作を行わない者が乗っていてもよい。運転操作を行わない者には、例えば、単に移動体20の座席に着座している者、組み付け、検査、スイッチ類の操作といった運転操作とは異なる作業を移動体20に乗りながら行っている人が含まれる。なお、移動体20に乗車した運転者の運転操作による運転は、「有人運転」と呼ばれることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
方法
7日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
組電池
7日前
トヨタ自動車株式会社
自動車
11日前
トヨタ自動車株式会社
表示装置
3日前
トヨタ自動車株式会社
電源装置
3日前
トヨタ自動車株式会社
電動車両
5日前
トヨタ自動車株式会社
ステータ
3日前
トヨタ自動車株式会社
触媒装置
3日前
トヨタ自動車株式会社
駆動装置
3日前
トヨタ自動車株式会社
充電装置
3日前
トヨタ自動車株式会社
検査装置
5日前
トヨタ自動車株式会社
制御装置
11日前
トヨタ自動車株式会社
配車装置
3日前
トヨタ自動車株式会社
駆動装置
3日前
トヨタ自動車株式会社
電池冷却器
5日前
トヨタ自動車株式会社
シール構造
3日前
トヨタ自動車株式会社
電池パック
11日前
トヨタ自動車株式会社
全固体電池
11日前
トヨタ自動車株式会社
情報処理装置
11日前
トヨタ自動車株式会社
衝突検出装置
3日前
トヨタ自動車株式会社
電力変換装置
4日前
トヨタ自動車株式会社
情報処理装置
11日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
11日前
トヨタ自動車株式会社
異常診断装置
3日前
トヨタ自動車株式会社
音源推定方法
3日前
トヨタ自動車株式会社
情報処理装置
11日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
情報処理装置
11日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ