TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071063
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2024184130
出願日
2024-10-18
発明の名称
流体の流量制御に用いられるバルブアセンブリ及びバルブシステム
出願人
イリノイ トゥール ワークス インコーポレイティド
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
7/06 20060101AFI20250424BHJP(制御;調整)
要約
【課題】マスフローメータの提供。
【解決手段】マスフローメータは、第1のキャビティ及び第2のキャビティを含み、マスフローメータを通る流路を備える。マスフローメータはまた、第1のキャビティ及び第2のキャビティに隣接し、第1のキャビティがその上流に、第2のキャビティがその下流にある層流要素を備える。圧力変換器は、第1のキャビティ又は第2のキャビティの少なくとも一方に配置され、少なくとも1つのダイアフラムを含み、第1の圧力に対する少なくとも1つのダイアフラムの線形応答及び非線形応答を測定して、圧力を示す電圧信号を決定する。マスフローメータは、圧力変換器から得られた圧力読み取り値を、層流要素を通る質量流量を示す信号に変換する。
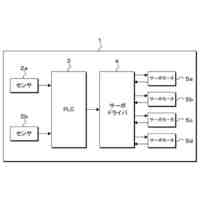
【選択図】図1
特許請求の範囲
【請求項1】
マスフローメータであって、
前記マスフローメータを通る流路であって、第1のキャビティ及び第2のキャビティを含む、流路と、
前記第1のキャビティ及び前記第2のキャビティに隣接する層流要素であって、前記第1のキャビティが前記層流要素の上流にあり、前記第2のキャビティが前記層流要素の下流にある、層流要素と、
前記第1のキャビティ又は前記第2のキャビティの少なくとも一方内に配置された圧力変換器であって、前記圧力変換器は、少なくとも1つのダイアフラムを含み、前記圧力変換器は、第1の圧力に対する前記少なくとも1つのダイアフラムの線形応答及び非線形応答を測定して、圧力を示す電圧信号を決定する、圧力変換器と、
を備え、
前記マスフローメータは、前記圧力変換器から得られた圧力読み取り値を、前記層流要素を通る質量流量を示す信号に変換する、
マスフローメータ。
続きを表示(約 1,200 文字)
【請求項2】
前記マスフローメータはコントローラと通信し、前記コントローラは、
前記層流要素を通る所望の流量を示す設定値信号を受信し、
前記層流要素を通る質量流量を示す前記信号が、受信された前記設定値信号に実質的に一致するようにバルブ駆動信号を制御する、
ように動作可能である、請求項1に記載のマスフローメータ。
【請求項3】
前記ダイアフラムの定格圧力範囲は0psi~50psiである、請求項1に記載のマスフローメータ。
【請求項4】
前記ダイアフラムの線形の性能領域における定格圧力は5psi未満であり、主に非線形の性能領域における定格圧力は5psiを超える、請求項1に記載のマスフローメータ。
【請求項5】
前記圧力変換器の非線形性能領域における前記圧力変換器の定格圧力は、線形性能領域における前記定格圧力の20倍を超える、請求項1に記載のマスフローメータ。
【請求項6】
制御バルブが前記第1のキャビティの上流に配置され、前記マスフローメータは、圧縮性層流を計算するために、主にm=K×(P1
2
-P2
2
)に基づく方程式を使用し、前記制御バルブの駆動信号が前記制御バルブを位置決めするために使用される、請求項2に記載のマスフローメータ。
【請求項7】
制御バルブが前記第1のキャビティの上流に配置され、前記マスフローメータは、音速流を計算するために、主にm=K×P1に基づく方程式を使用し、前記制御バルブの駆動信号が前記制御バルブを位置決めするために使用される、請求項2に記載のマスフローメータ。
【請求項8】
制御バルブが前記第2のキャビティの下流に配置され、前記マスフローメータは、層流を計算するために、主にm=K×(P1-P2)/(P1=P2)/2)に基づく方程式を使用し、前記制御バルブの駆動信号が前記制御バルブを位置決めするために使用される、請求項2に記載のマスフローメータ。
【請求項9】
前記圧力変換器は絶対圧センサであり、前記マスフローメータは差圧センサを更に備え、前記差圧センサは少なくとも1つのダイアフラムを含み、前記差圧センサは前記少なくとも1つのダイアフラムの各側における第2の圧力と第3の圧力との間の差に対する線形応答及び非線形応答を測定して、前記圧力差を示す電圧信号を決定する、請求項1に記載のマスフローメータ。
【請求項10】
前記圧力変換器は、第1の差圧センサ及び第2の絶対圧センサを備え、前記第1の差圧センサ及び前記第2の絶対圧センサは、前記少なくとも1つのダイアフラムの線形応答及び非線形応答を測定して、前記第1の圧力を示す電圧信号を決定する、請求項1に記載のマスフローメータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【背景技術】
【0001】
半導体ウェハの製造で使用される機器は、所望の生産歩留まりを維持するために高精度で動作することが要求される。集積回路を生成するプロセスでは、半導体ウェハは、プロセスチャンバ内で或る特定の化学物質を用いて処理される。マスフローコントローラ(MFC)は、これらの化学物質を一貫した方法でかつ精密な流量でプロセスチャンバに供給するために使用される。これは、MFCが、非常に厳しい正確度を保持し、複数の設定値で動作し、ウェハ製造プロセス中に絶えず停止及び再始動する必要があるため、著しく困難である可能性がある。そのような正確度を管理するために、現行技術水準のMFCは、プロセッサベースの制御ユニット、多数のセンサ、及び高度診断システムを装備している。
続きを表示(約 800 文字)
【0002】
本開示の特徴及び利点がより完全に理解されるように、ここで、添付の図とともに詳細な説明を参照する。添付の図において、異なる図における対応する数字は、対応する部分を指す。
【図面の簡単な説明】
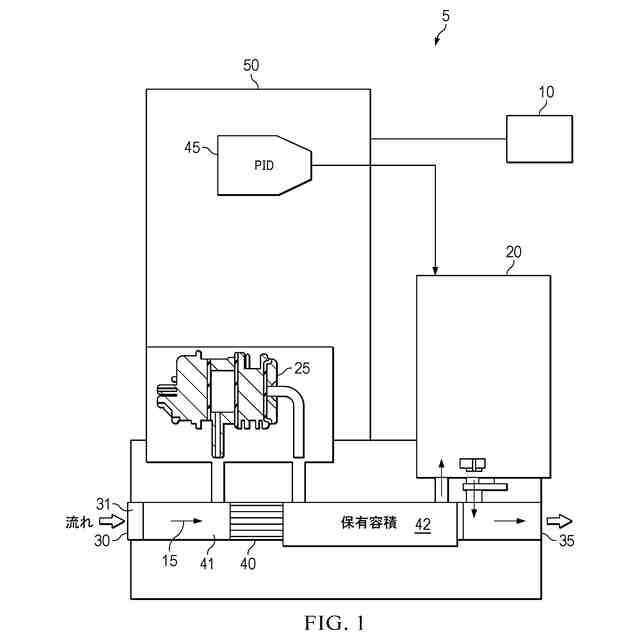
【0003】
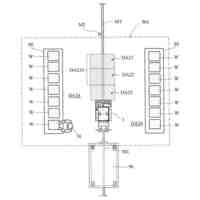
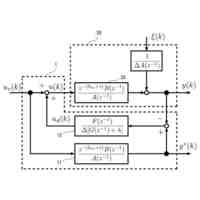
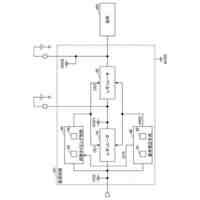
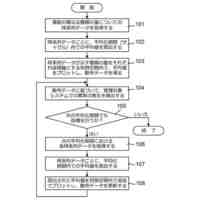
本開示の或る特定の実施形態による、バルブの上流に流量センサを有する圧力ベースのマスフローコントローラの概略の説明図である。
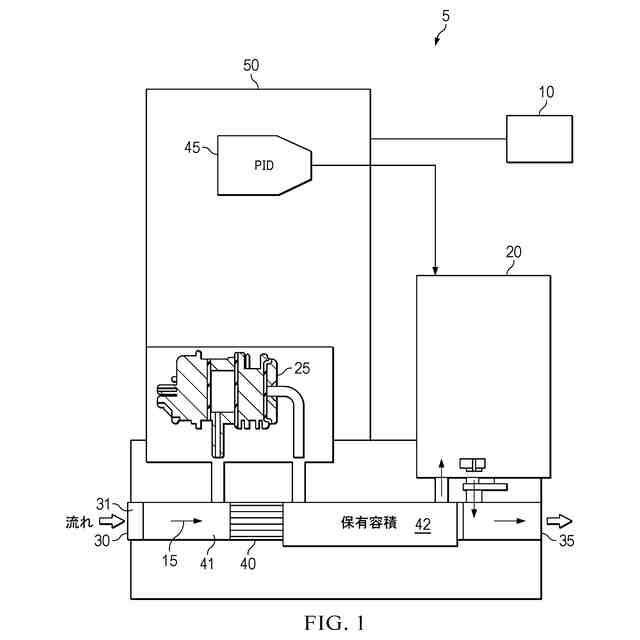
【0004】
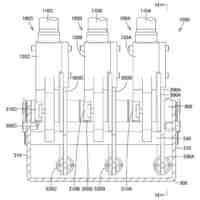
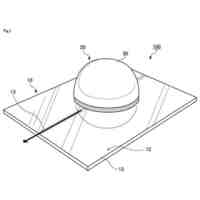
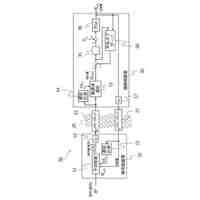
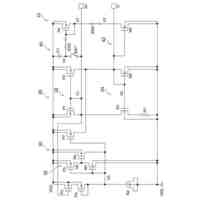
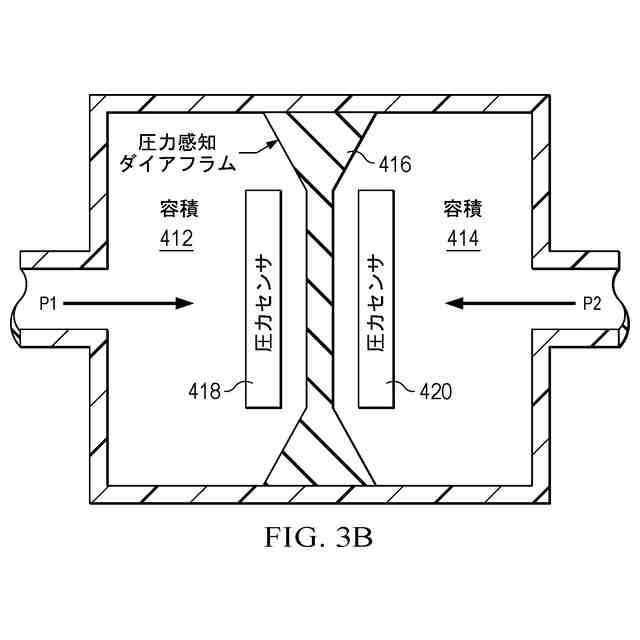
本開示の或る特定の実施形態による、絶対圧及び差圧組合せ圧力変換器アセンブリの概略の説明図である。
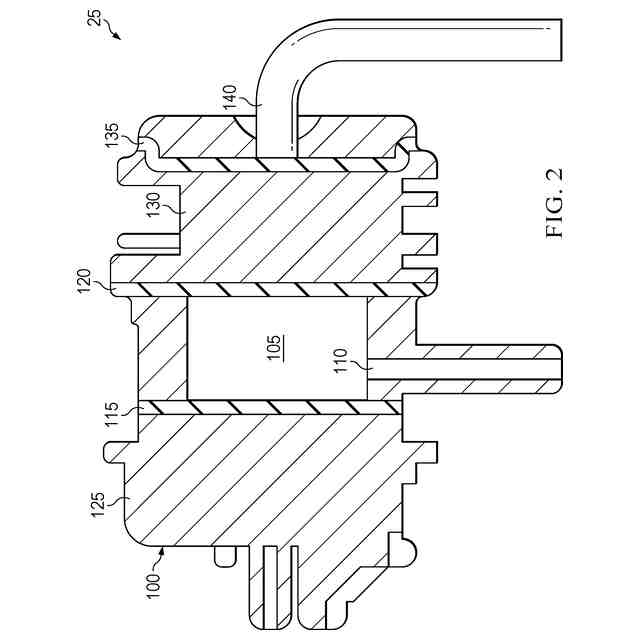
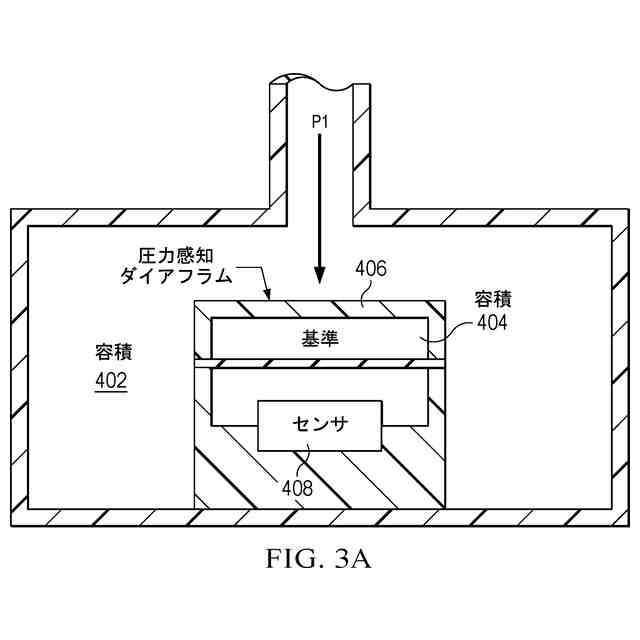
【0005】
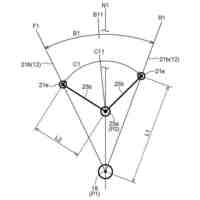
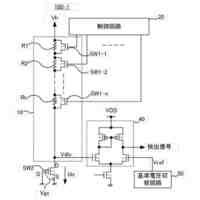
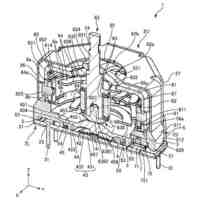
或る特定の例示の実施形態による、圧力センサの説明図である。
或る特定の例示の実施形態による、圧力センサの説明図である。
【0006】
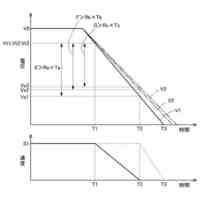
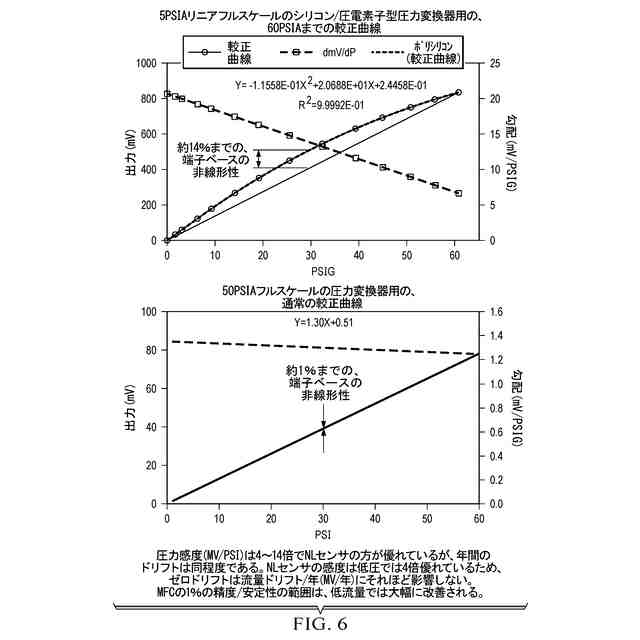
本発明の教示の1つの実施形態に従って実装された、0psi~5psiの支配的な線形範囲及び5psi~60psiの非線形範囲を有する、プロトタイプMFCの性能モデリングの説明図である。
【0007】
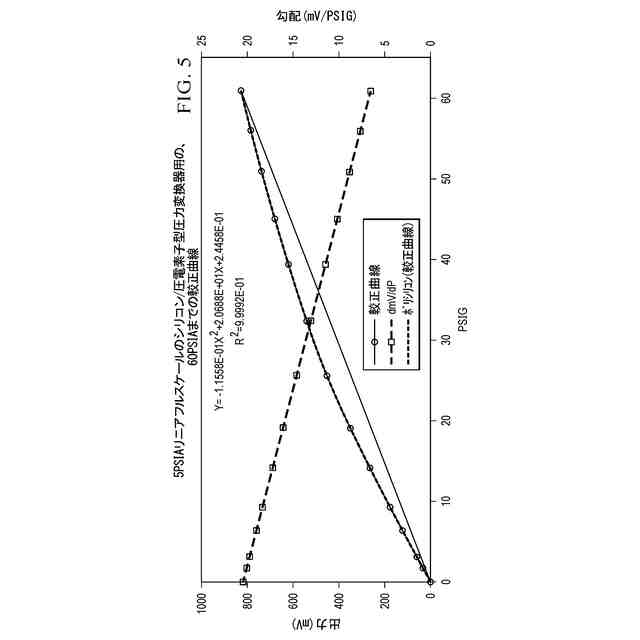
本発明の1つの実施形態に従って実装された、デバイスの使用範囲を非線形範囲に拡張する場合における実施形態の改善された性能が示された、圧力センサの性能特性(センサ感度及び非線形性)を示すテストデータの説明図である。
【0008】
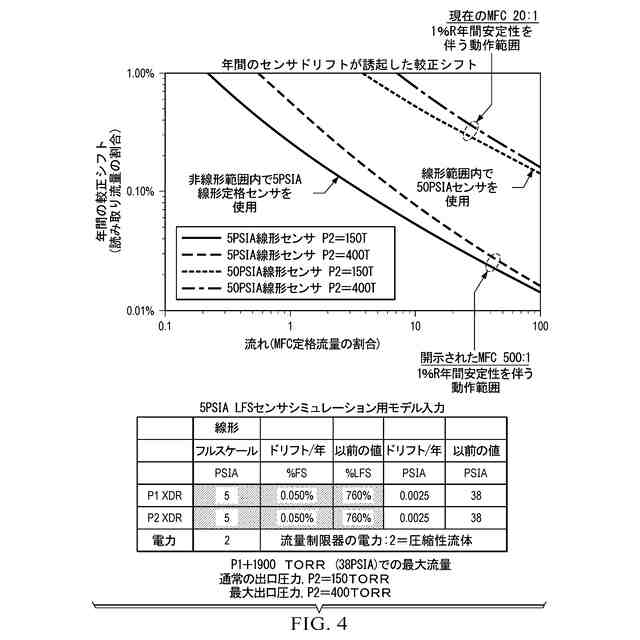
MFCに使用される従来のセンサの性能と、本発明の1つの実施形態に従って実装されるMFCに使用されるセンサの性能との比較を示す説明図である。
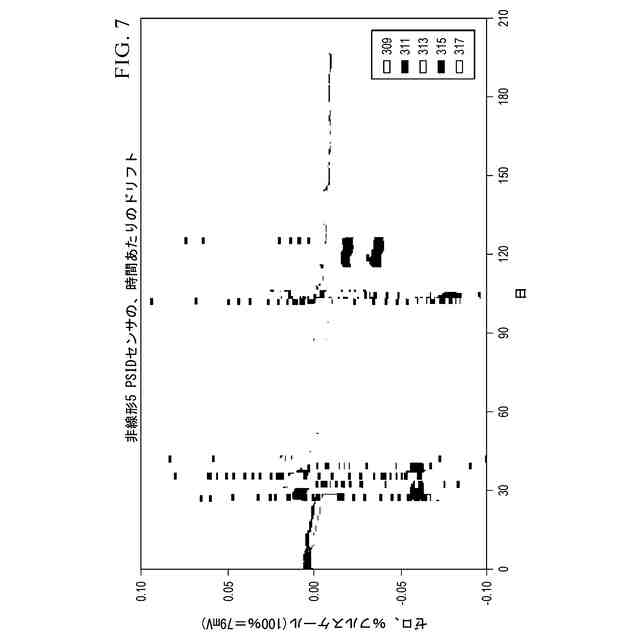
【0009】
本発明の1つの実施形態に従って実装されたプロトタイプ圧力センサの経時安定性を示すエージングテストの説明図である。
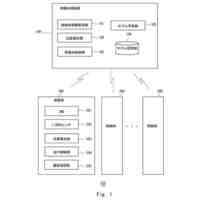
【0010】
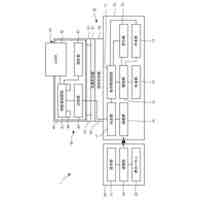
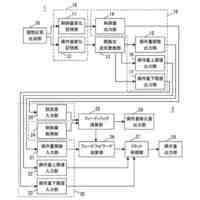
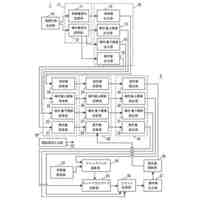
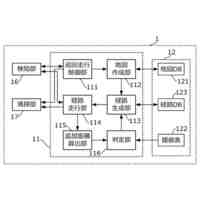
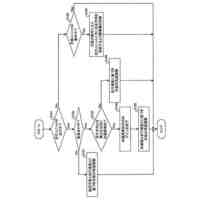
或る特定の例示の実施形態による、コンピューティングマシン及びシステムアプリケーションモジュールの説明図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
1か月前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
18日前
株式会社ダイフク
物品搬送設備
1か月前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
2か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
12日前
トヨタ自動車株式会社
自律走行装置
2か月前
日本精工株式会社
制御装置および制御方法
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
チームラボ株式会社
走行システム及び走行路
1か月前
日本信号株式会社
自走式装置
2日前
井関農機株式会社
作業車両
26日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
株式会社デンソー
診断装置
16日前
ミツミ電機株式会社
電源回路及びその起動方法
2か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
2か月前
ローム株式会社
半導体装置
2か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ローム株式会社
バイアス回路
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ