TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025071198
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2025024937,2023111172
出願日
2025-02-19,2020-07-24
発明の名称
自由空間推定のためのシステムおよび方法
出願人
デカ・プロダクツ・リミテッド・パートナーシップ
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20250424BHJP(信号)
要約
【課題】自由空間推定のためのシステムおよび方法の提供。
【解決手段】センサ雑音、センサ可用性、障害物高、およびセンサからの障害物の距離を考慮することを含む、表面上で進行する自律車両と関連付けられる点群データにおいて自由空間を推定し、自由空間確率を割り当てるためのシステムおよび方法。システムおよび方法は、他の因子の中でもとりわけ、表面平面を決定し、点が表面平面上にあるかどうかに従って、点群点を分類することを含むことができる。
【選択図】なし
特許請求の範囲
【請求項1】
自律車両横断のための点群データにおける自由空間確率を割り当てるための方法であって、前記方法は、
前
記点群データ
をセ
グメントにセグメント化することと、
前記点群データ内で、平面、前記平面内の平面点、および前記平面点のうちの1つと関連付けられる非平面点を位置特定することと、
前
記平面のうちの1つを自律車両横断のための表面平面として選定することと、
前記関連付けられる非平面点に基づいて、前記平面点のそれぞれを障害物点として分類することと、
前記関連付けられる非平面点に基づいて、各障害物点に対する障害物高を決定することと、
前
記表面平面
までの
ブラインド距離を決定することと、
前記ブラインド距離
と外
周との間
の線
に沿っ
たセ
ル毎に、
前記線に沿った前記セルを占有する障害物の初期確率を
、
前記セル内の前記障害物点
、前
記線に沿った前記セルの位置、およびそれらの組み合わせに基づいて算出すること、
前
記セル内の前記線に沿った前記障害物の最近接するもの
まで
の第1の距離
、前
記線に沿った前記セル
まで
の第2の距離、前記線に沿った前記セルに関す
る測
定有意性、前記線に沿った前記セルに関する前記初期確率、デフォルト確率、およびそれらの組み合わせに基づいて、雑音係数を算出すること、ならびに、
前記線に沿った前記セルを占有する前記障害物の現在の確率を、前記初期確率および前記雑音係数に基づいて算出すること
を行うことと
を含む、方法。
続きを表示(約 1,900 文字)
【請求項2】
前記初期確率を算出することは、
セ
ンサが、利用不可能であり、前記セルが、前記ブラインド距離の近傍にある近傍のセルである場合、前記セルの初期確率=1.0であることと、
前記センサが、利用不可能であり、前記セルが、前記近傍のセルと前記外周との間にある場合、前記セルの初期確率=0.5であることと、
前記センサが、利用可能であり、前記セル内に前記障害物点のうちの少なくとも1つが存在する場合、または以前に遭遇された前記線に沿った前記セルのうちの1つが、前記障害物点のうちの少なくとも1つを含んでいた場合、前記セルの初期確率=0.5であることと、
前記センサが、利用可能であり、前記セル内に障害物点が存在せず、前記線に沿った遭遇された前記セルのうちのいずれも、前記障害物点を含んでいなかった場合、前記セルの初期確率=0.3であることと
を含む、請求項1に記載の方法。
【請求項3】
前記雑音係数を算出することは、
JPEG
2025071198000031.jpg
7
130
を含み、
式中、
d=前記第2の距離であり、
Z
t
=前記第1の距離であり、
σ=Z
t
2
×0.001である、請求項1に記載の方法。
【請求項4】
前記現在の確率を算出することは、
前記セルの前記雑音係数+前記セルの初期確率
を含む、請求項1に記載の方法。
【請求項5】
前記平面はそれぞれ、前記平面からある距離までの前記非平面点を備える、請求項1に記載の方法。
【請求項6】
自律車両横断のための点群データにおける自由空間確率を割り当てるためのシステムであって、前記システムは、
前
記点群データ
をセ
グメント化す
るた
めに構成されるセグメントプロセッサと、
前記点群データ内で、平面、前記平面内の平面点、および前記平面点のうちの1つと関連付けられる非平面点を位置特定するために構成される平面プロセッサと、
障害物プロセッサであって、前記障害物プロセッサは、
前
記平面のうちの1つを自律車両横断のための表面平面として選定することと、
前記関連付けられる非平面点に基づいて、前記平面点のそれぞれを障害物点として分類することと、
前記非平面点に基づいて、前記障害物点と関連付けられる障害物高を決定することと
を行うために構成される、障害物プロセッサと
、
線掃引プロセッサであって、前記線掃引プロセッサは
、
初期確率プロセッサであって、前記初期確率プロセッサは、
ブ
ラインド距離を決定することと、
前記ブラインド距離と前記外周との間の各線に沿った前記セル毎に、前記線に沿った前記セルを占有する障害物の初期確率を
、
前記セル内の前記障害物点
、前
記線に沿った前記セルの位置、およびそれらの組み合わせに基づいて算出することと
を行うために構成される、初期確率プロセッサと、
雑音係数プロセッサであって、前記雑音係数プロセッサは、前記ブラインド距離と前記外周との間の各線に沿った前記セル毎に、
前
記セル内の前記線に沿った前記障害物の最近接するもの
まで
の第1の距離
、前
記線に沿った前記セル
まで
の第2の距離、前記線に沿った前記セルに関す
る測
定有意性、前記線に沿った前記セルに関する前記初期確率、デフォルト確率、およびそれらの組み合わせに基づいて、雑音係数を算出するために構成される、雑音係数プロセッサと、
現在の確率プロセッサであって、前記現在の確率プロセッサは、前記ブラインド距離と前記外周との間の各線に沿った前記セル毎に、前記障害物点の現在の確率を、前記初期確率および前記雑音係数に基づいて算出するために構成される、現在の確率プロセッサと
を備える、線掃引プロセッサと
を備える、システム。
【請求項7】
センサから前記表面に投影するために構成されるセンサビームを有する前記センサをさらに備え、前記ブラインド距離は、前記センサビームと前記表面平面との間の交点に基づいて決定される、請求項6に記載のシステム。
発明の詳細な説明
【背景技術】
【0001】
(関連出願の相互参照)
本特許出願は、参照することによってその全体として本明細書に組み込まれる、2019年7月26日に出願され、「System and Method for Free Space Estimation」と題された、米国仮特許出願第62/879,391号(弁理士整理番号第AA027号)の利益を主張する。
続きを表示(約 5,900 文字)
【0002】
車両は、自由な妨害されない空間を含むようにそれらの人間オペレータによって決定される表面上で進行する。人間は、車両内またはその上の経路を横断するかどうかを決定するために、複雑な基準のセットを使用する。考慮事項は、限定ではないが、周囲照明、天候、およびフロントガラスの問題等の任意の数の因子を前提として、障害物の高さの程度、人間によって見られることができる障害物の量、人間が可視化することができない車両の周囲の面積、および人間の視覚システムが妨害物を検出する際に正確である程度を含むことができる。
【0003】
自律車両において妨害物をナビゲートすることは、人間車両オペレータによって日常的に遭遇される同一の複雑な基準のうちのいくつかを電子的に評価することを要求し得る。妨害されない(自由)空間が、ナビゲーション経路に沿って連続的に進むために、自律車両に関する利用可能なセンサデータから迅速に決定されなければならない。以前は、自由空間は、他の方法の中でもとりわけ、ステレオカメラデータから、カメラシステムによって入手されるビデオにおける画像のシーケンスから、およびミリ波レーダレーダから推定されていた。
【0004】
必要とされるものは、センサデータから、経路が妨害される確率を算出する、効率的なシステムである。センサデータを収集するセンサは、例えば、自律車両上に搭載されることができる。必要とされるものは、道路進行およびセンサ限界の現実を考慮するシステムである。
【発明の概要】
【課題を解決するための手段】
【0005】
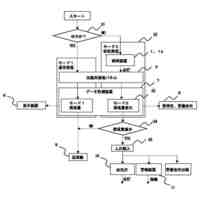
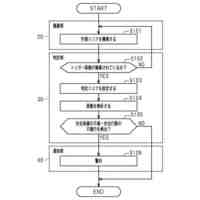
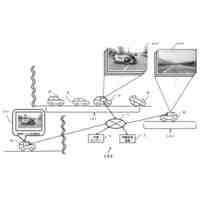
表面上で進行する自律車両と関連付けられる点群データにおける自由空間確率を割り当てるための本教示のシステムおよび方法は、センサ雑音、センサ可用性、障害物高、およびセンサからの障害物の距離を考慮することを含む。本教示の方法は、限定ではないが、センサから点群データを受信することを含むことができる。センサは、センサビームを含むことができ、センサビームは、少なくともセンサから表面に投影されることができる。いくつかの構成では、センサは、自律車両を囲繞する面積を走査し、事前選択された角度に及ぶ表面からの円錐におけるデータを収集することができる。本方法は、点群データを第1の事前選択されたサイズのセグメントにセグメント化することと、点群データ内の平面、平面内の平面点、および平面点のうちの少なくとも1つと関連付けられる非平面点を位置特定することとを含むことができる。本方法は、平面点に対する法線を決定し、平面点と関連付けられる非平面点を決定することを含むことができる。本方法は、少なくとも法線およびセンサの場所に基づいて、事前選択された基準に従って、平面のうちの少なくとも1つを表面平面として選定することと、少なくとも関連付けられる非平面点に基づいて、平面点のそれぞれを障害物点として分類することと、少なくとも非平面点に基づいて、障害物点と関連付けられる障害物高を決定することとを含むことができる。本方法は、表面平面からグリッドを作成することを含むことができる。グリッドは、事前選択された数のセルと、外周とを含むことができる。本方法は、少なくともセル内の障害物高に基づいて、セル毎の測定有意性を算出することと、少なくともセンサビームと表面平面との間の交点に基づいて、センサからのブラインド距離を決定することとを含むことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、本方法は、線に沿ったセルを占有する障害物の初期確率を算出することを含むことができる。初期確率は、少なくとも、センサの可用性、セル内の障害物点、およびセンサに対する線に沿ったセルの位置に基づくことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、本方法は、少なくとも、センサとセル内の線に沿った障害物の最近接するものとの間の第1の距離、センサと線に沿ったセルとの間の第2の距離、線に沿ったセルに関する測定有意性、線に沿ったセルに関する初期確率、およびデフォルト確率に基づいて、雑音係数を算出することを含むことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、本方法は、線に沿ったセルを占有する障害物の現在の確率を算出することを含むことができる。現在の確率は、少なくとも、セルに関する初期確率およびセルに関する雑音係数に基づくことができる。
【0006】
第1の事前選択されたサイズは、随意に、約40m×40m×2mのサイズの形状を含むことができる。事前選択された基準は、随意に、少なくとも1つの平面の法線が、センサに向いていないとき、表面平面を選定することを含むことができる。事前選択された数のセルは、随意に、400×400個を含むことができる。初期確率を算出することは、随意に、以下を含むことができ、すなわち、(a)センサが、利用不可能であり、セルが、近傍のセルである場合、近傍のセルは、ブラインド距離の近傍にあり、セルの初期確率は、随意に、1.0に等しくあり得、(b)センサが、利用不可能であり、セルが、近傍のセルと外周との間にある場合、セルの初期確率は、随意に、0.5に等しくあり得、(c)センサが、利用可能であり、セル内に障害物点のうちの少なくとも1つが、存在する場合、または以前に遭遇された線に沿ったセルのうちの1つが、障害物点のうちの少なくとも1つを含んでいた場合、セルの初期確率は、随意に、0.5に等しくあり得、(d)センサが、利用可能であり、セル内に障害物点のうちのいずれも、存在せず、線に沿った以前に遭遇されたセルのうちのいずれも、障害物点のうちの少なくとも1つを含んでいなかった場合、セルの初期確率は、随意に、0.3に等しくあり得る。雑音係数は、随意に、
JPEG
2025071198000001.jpg
8
122
に等しくあり得、式中、d=第2の距離であり、Z
t
=第1の距離であり、σ=Z
t
2
×0.001である。現在の確率を算出することは、随意に、セルに関する雑音係数およびセルの初期確率の合計に等しくあり得る。少なくとも1つの平面は、随意に、少なくとも1つの平面からの第1の事前選択された距離までの非平面点を含むことができる。第1の事前選択された距離は、随意に、2mを含むことができる。
【0007】
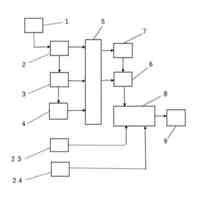
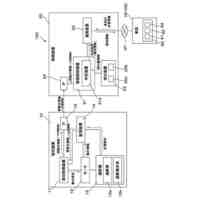
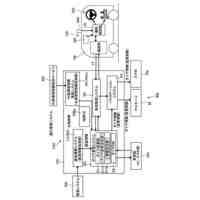
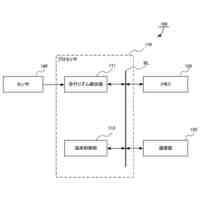
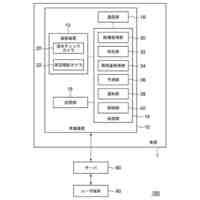
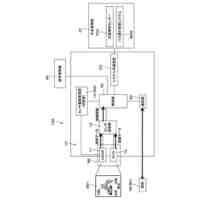
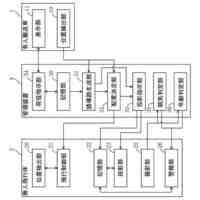
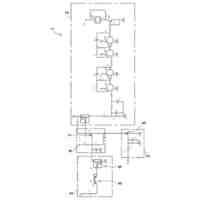
点群データからの自由空間確率を割り当てるための本教示のシステムは、限定ではないが、センサビームを有する、センサを含むことができる。センサビームは、少なくともセンサから表面に投影されることができる。本システムは、センサから点群データを受信する、セグメントプロセッサを含むことができる。セグメントプロセッサは、点群データを第1の事前選択されたサイズのセグメントにセグメント化する。本システムは、点群データ内で、平面、平面内の平面点、および平面点のうちの少なくとも1つと関連付けられる非平面点を位置特定する、平面プロセッサを含むことができる。本システムは、平面点に対する法線を決定し、平面点と関連付けられる非平面点を決定する、法線プロセッサを含むことができる。法線プロセッサは、少なくとも法線およびセンサの場所に基づいて、事前選択された基準に従って、平面のうちの少なくとも1つを表面平面として選定することができる。法線プロセッサは、少なくとも関連付けられる非平面点に基づいて、平面点のそれぞれを障害物点として分類することができる。法線プロセッサは、少なくとも非平面点に基づいて、障害物点と関連付けられる障害物高を決定することができる。本システムは、表面平面からグリッドを作成する、グリッドプロセッサを含むことができる。グリッドは、事前選択された数のセルと、外周とを含むことができる。本システムは、測定有意性プロセッサを含み得る、線掃引プロセッサを含むことができる。測定有意性プロセッサは、少なくともセル内の障害物高に基づいて、セル毎の測定有意性を算出することができる。線掃引プロセッサは、少なくともセンサビームと表面平面との間の交点に基づいて、センサからのブラインド距離を決定する、初期確率プロセッサを含むことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、初期確率プロセッサは、線に沿ったセルを占有する障害物の初期確率を算出することを含むことができる。初期確率は、少なくとも、センサの可用性、セル内の障害物点、およびセンサに対する線に沿ったセルの位置に基づくことができる。線掃引プロセッサは、雑音係数プロセッサを含むことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、雑音係数プロセッサは、少なくとも、センサとセル内の線に沿った障害物の最近接するものとの間の第1の距離、センサと線に沿ったセルとの間の第2の距離、線に沿ったセルに関する測定有意性、線に沿ったセルに関する初期確率、およびデフォルト確率に基づいて、雑音係数を算出することができる。線掃引プロセッサは、現在の確率プロセッサを含むことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、現在の確率プロセッサは、線に沿ったセルを占有する障害物点の現在の確率を算出することができる。現在の確率は、少なくとも、セルに関する初期確率およびセルに関する雑音係数に基づくことができる。
【0008】
いくつかの構成では、自律車両に関するセンサデータにおける自由空間確率を割り当てるための方法は、限定ではないが、センサデータにおける少なくとも1つの表面平面を決定することを含むことができ、少なくとも1つの表面平面は、自律車両が進行している表面と関連付けられることができる。本方法は、少なくとも1つの表面平面と関連付けられるセンサデータにおいて、存在する場合、障害物を決定し、存在する場合、障害物の高さを決定することと、少なくとも自律車両の寸法に基づいて、自律車両からのブラインド距離を決定することとを含むことができる。本方法は、少なくとも1つの表面平面上にグリッドを作成することを含むことができ、グリッドは、事前選択された数のセルと、外周とを含むことができる。ブラインド距離と外周との間の少なくとも1つの表面平面上の各線に沿ったセル毎に、本方法は、線に沿ったセルを占有する障害物の初期確率を算出することを含むことができる。初期確率は、少なくとも、センサデータの可用性、セル内の障害物、および自律車両に対する線に沿ったセルの位置に基づくことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、本方法は、少なくとも、自律車両とセル内の線に沿った障害物の最近接するものとの間の第1の距離、自律車両と線に沿ったセルとの間の第2の距離、線に沿ったセルに関する障害物高、線に沿ったセルに関する初期確率、およびデフォルト確率に基づいて、雑音係数を算出することを含むことができる。ブラインド距離と外周との間の各線に沿ったセル毎に、本方法は、線に沿ったセルを占有する障害物の現在の確率を算出することを含み、現在の確率は、少なくとも、セルに関する初期確率およびセルに関する雑音係数に基づくことができる。
【0009】
事前選択された数のセルは、随意に、400×400個を含むことができる。初期確率を算出することは、随意に、以下を含むことができ、すなわち、(a)センサデータが、利用不可能であり、セルが、近傍のセルである場合、近傍のセルは、ブラインド距離の近傍にあり、セルの初期確率は、随意に、1.0に等しくあり得、(b)センサデータが、利用不可能であり、セルが、近傍のセルと外周との間にある場合、セルの初期確率は、随意に、0.5に等しくあり得、(c)センサデータが、利用可能であり、セル内に障害物のうちの少なくとも1つが、存在する場合、または以前に遭遇された線に沿ったセルのうちの1つが、障害物のうちの少なくとも1つを含んでいた場合、セルの初期確率は、随意に、0.5に等しくあり得、(d)センサデータが、利用可能であり、セル内に障害物のうちのいずれも、存在せず、線に沿った以前に遭遇されたセルのうちのいずれも、障害物のうちの少なくとも1つを含んでいなかった場合、セルの初期確率は、随意に、0.3に等しくあり得る。雑音係数を算出することは、随意に、
JPEG
2025071198000002.jpg
8
135
に等しくあり得、式中、d=第2の距離であり、Z
t
=第1の距離であり、σ=Z
t
2
×0.001である。現在の確率を算出することは、随意に、セルの雑音係数およびセルの初期確率の合計に等しくあり得る。少なくとも1つの表面平面は、随意に、少なくとも1つの表面平面からの第1の事前選択された距離までの非平面点を含むことができる。第1の事前選択された距離は、随意に、2mを含むことができる。本方法は、随意に、少なくとも非平面点に基づいて、障害物高を決定することを含むことができる。
【0010】
別の構成では、LIDARデータがリングを含む、LIDARデータからの自由空間推定は、限定ではないが、LIDARデータを受信することと、各リング内の事前選択された数の点をフィルタリングすることとを含むことができる。フィルタリングすることは、各事前選択された数の点における中央値を識別することと、中央値から事前選択された範囲内にある点を留保することとを含むことができる。留保された点の間に、点の間のデカルト距離が、事前選択された値を上回る不連続性があり得る。不連続性の間にある点は、それらが、中央値フィルタを通過した場合、良好な点として標識化される。良好な点は、低いセンサ雑音を有することが予期されることができる。不連続性の間の良好な点の数が、事前選択された値を上回る場合、それらの良好な点は、留保される。不連続性または中断点は、特徴の縁に見出されることができ、したがって、点の間の距離の急激な変化が、存在するとき、縁が、見出され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
個人
黄色点滅式信号機
2か月前
個人
空飛ぶ自動車の空路
2か月前
個人
忘れ物検出装置
1か月前
個人
出会い頭事故防止装置
1か月前
能美防災株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
10日前
日本信号株式会社
情報管理システム
1か月前
株式会社島津製作所
警報装置
1か月前
日本信号株式会社
情報提供システム
9日前
日本信号株式会社
運行管理システム
2か月前
ホーチキ株式会社
監視システム
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
2か月前
株式会社SUBARU
車速制御システム
1か月前
タック株式会社
安全監視システム
1か月前
個人
磁気・光学誘導路線による車両の運行制御
3日前
株式会社JVCケンウッド
通知システム
1か月前
株式会社SUBARU
危険報知システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
日本信号株式会社
路側装置及びセンサ装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
トヨタ自動車株式会社
配車システム
2日前
株式会社アジラ
注目行動呼びかけシステム
1か月前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
本田技研工業株式会社
路面評価装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社デンソー
運転支援装置
1か月前
河村電器産業株式会社
警報装置
1か月前
株式会社 ミックウェア
情報処理装置、情報処理方法
1か月前
トヨタ自動車株式会社
車両
1か月前
東亜電子工業株式会社
警報コントローラ
25日前
株式会社知財事業研究所
運行計画作成システム
1か月前
能美防災株式会社
非常報知システム
17日前
トヨタ自動車株式会社
方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ