TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071516
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181742
出願日
2023-10-23
発明の名称
磁気・光学誘導路線による車両の運行制御
出願人
個人
代理人
主分類
G08G
1/00 20060101AFI20250428BHJP(信号)
要約
【課題】効率的な安全を確保した交通網を実現する。
【解決手段】磁気誘導路上に画像誘導路を表示し両者差異比較による帰還ループ制御での安全運行と、路線上の障害物件と、その距離確認による安全ブレーキ距離走行、磁気誘導路の分岐路での連結車両の走行中での一部車両の支線入行、及び高速道を基幹路線として一般道との連接による総合交通網の形成。更に、磁気スリットによる全路線上に制限速度の設定により安全運転を行う。
【選択図】図1
特許請求の範囲
【請求項1】
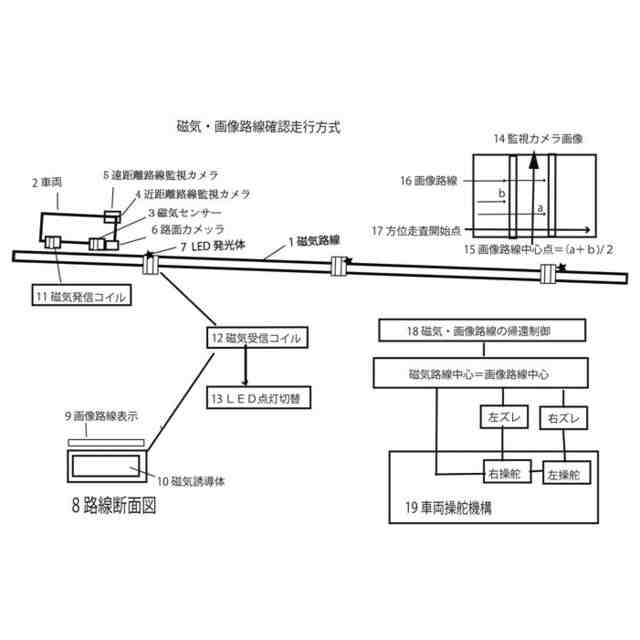
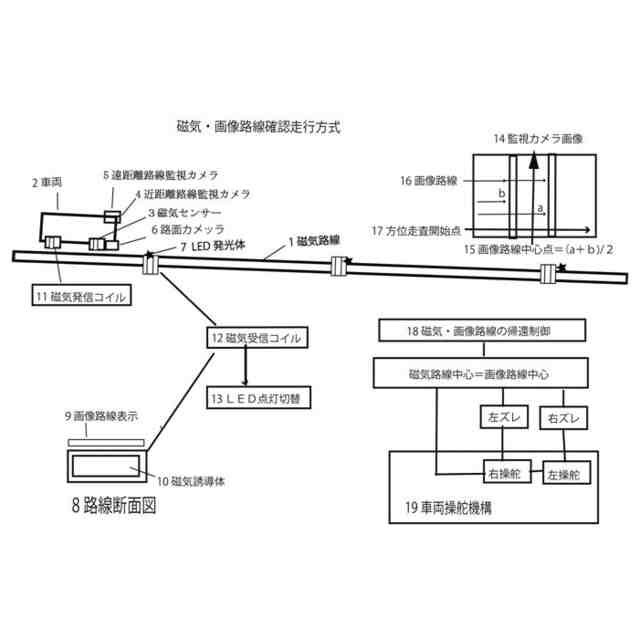
車両の前方の下部両側に磁気センサーと、車両正面の下部に近距離画像路線監視カメラ、上部に遠距離画像路線監視カメラ及び車両下部に路線監視カメラ を、路面には、誘導磁性体を中心にし、上部に左右で異なる2色の夜光性塗料による画像路線表示を行い、更に、路線表示色と同一色のLED発光体を路線の彎曲部には密に、直線部は数十メートル間隔で配置した誘導路線を左右に2線埋設する。車両の走行によって変わり繰り返し表示される車両監視カメラの表示映像は、1画面演算時間と表示回数の積=単位距離の車両走行時間となり、1台の監視カメラの表示範囲は搭載車両の速力で決まり表示回数は制限される。また、遠近画像路線監視カメラは、必要な監視距離を確保するため、2台の監視カメラの分担表示とする。なお、遠距離監視カメラ は、車両の高速時に必要な監視距離を得るため、距離分解能を低減し、画面表示距離を拡大する。路線監視カメラは、2台の磁気センサーの中央に配置し、車両の下で通常監視出来ない画像路線の中心点を計測する。この画像路線中心点は、画面左端から左右路線までの長さの和の2分の一となり、遠近監視カメラは画像路線部を重視して視角を狭めて、画像路線中心点を算出し、算出結果は数値データとして、総合表示器に送出し連結表示する。車両誘導の基本は、2線の磁気路線の運行で、その路線ズレを無くすため、路線監視カメラで画像路線の中心を求め、その画像路線中心点と磁気センサー方位を、車両の左右中心点と最後の画像走査面から得られる車両運行方位をそれぞれ比較し、それらのズレを車両操舵機構により修正する帰還ループで制御して、確実な気路線運行を保持して車両の安全運行を図る。
LED発光体の点灯は、車両後部に、コイルを巻いた磁気発信体を、磁気路線1に面して車両前部に設置し、交流電力で磁化した磁束を路線磁磁性体に送出磁化する。これを路線磁性体に巻いて埋設した磁気受信コイルコイルにより検出受信し、LED点灯切替で点灯制御する。点灯は点滅点灯とし、車両通過時に順次切り替えて車両前方で点滅する。ただし、LED発行体の密接埋設の部分は全LED発光体を同時点滅点灯とする。車両運用域の全路線では、区間ごとに上限走行速度を設定し、全路線の上限速度変更点で、各車両は磁気路線のスリットの断続信号としで区間上限速度情報を受け、各車両は、この上限速度内にて運行する。
続きを表示(約 1,300 文字)
【請求項2】
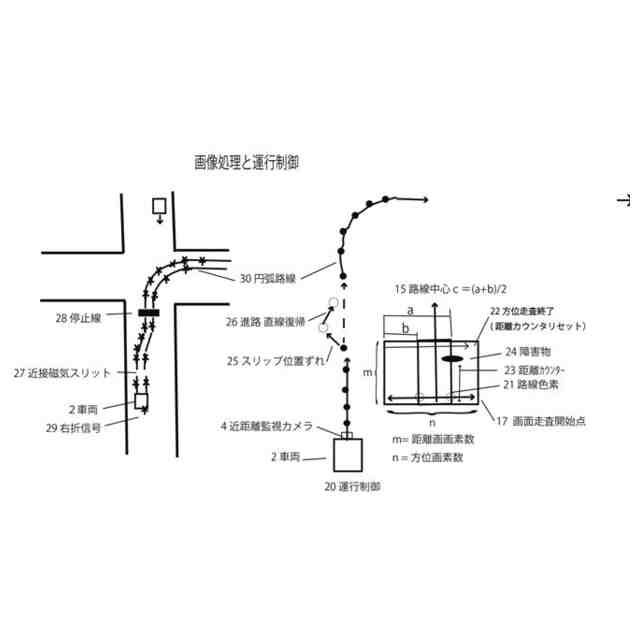
遠近両監視カメラによる画面走査開始点から、車両運行と共に繰り返される画面出力で、方位走査線上に出力される画像路線の2個所の画素の色確認により画像路線中心点を、連続する画面に毎に算出し、分担距離範囲の数値データとして、総合表示器に逐次送出する。方位走査線上の路線色画素の検出は路線中心点から左右車両幅範囲を基準色との比較によって検出する。路線色の検出が数画面で、検出来ない場合は、障害物による遮蔽として、距離走査カウンターの方位線数と画面距離分解能の積として障害物距離を算出する。障害物距離データは車両の走行により急速に変化するが、各場面で設定された速度ブレーキ距離を保持してに減速又は停止する。路線上に先車両がある場合は、速度ブレーキ距離を保持して同速運行する。
車両のスリップ等で、磁気路線の逸脱時には画像路線との不一致による逸脱パルスで停止、又は徐行運行とし、総合表示器上で、路線中心を結ぶ直線方位と車両の左右方位ズレ方位を確認して修復する。交差点など重要路線では、交差点近接時点での磁気路線による減速スリットで減速し、必要により右折信号を発信する。路線内に先行車両の有る場合は、その車両による左右画像路線の遮蔽距離を検出して、適正距離にて停止する。先行車両の無い場合は、白色停止線による左右画像路線の遮蔽を検出して停止し、停止時には車両後部路線交流磁化信号によってLED発光体を消灯する。その後発進時には停止線通過後は画像路線の断続パルスによる区間速度情報により点灯する。
【請求項3】
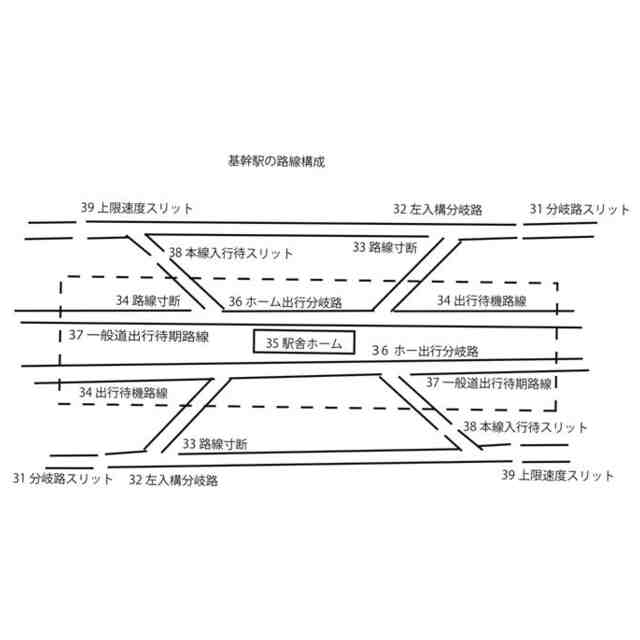
連結車両を走行中一部車両の連結を解除し、直進車両と左分岐車両を適正な車線に分離運行させる処理方式で、分岐点の路線は、分岐点直後の左直行路線を寸断し、合わせて右側誘導路線の分岐点直後で左誘導路線を寸断して置く。分岐点を運行する車両は、分岐点手前の磁気スリットパルスにより連結を解除し、同時に直行車両は右磁気センサーで運行制御して直進し、左分岐車両は左磁気センサーによって運行制御して左車線に入行する処理方式。一部車両を右分岐入行させる場合についても、左右反転した同一処理とする。
【請求項4】
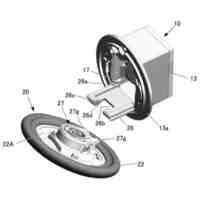
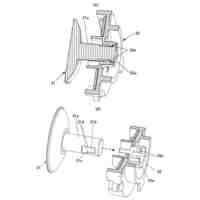
スリップ抑止板に固定された支柱を、限定された回転角の軸受け基盤によって車両前方の下部で車両進路に平行して取り付ける。スリップ抑止板には、内部の左右の嵌め込みガイド内で個別に上下する制動滑車を設ける。制動滑車は、回転を抑制された複数の制動ゴマと、これを路面に圧着するコイルバネ及び油圧シリンダーで構成され、上部のスリップ抑止板の構成枠に油圧シリンダーを介して取り付ける。通常、制動滑車は、油圧シリンダーにより、持ち上げ路面から離隔保持する。制動滑車の制動ゴマは横滑りを抑止のため縦溝を設ける。車両スリップ時などには油圧シリンダーにより制動滑車を路面に圧着制御するが、車両の正規進路とのズレ方位情報により、左ズレには右、右ズレには左の制動滑車を路面に圧着制御して停止する。この操作による制動滑車の作動により、スリップ抑止板の支柱回転部が規定の角度範囲で回転して停止する。更に前面スリップの場合は両サイド制動滑車を路面に圧着制御し停止する。その後総合画上で、車両を正常路線方位に徐行して復帰する。あることを確
発明の詳細な説明
【技術分野】
【0001】
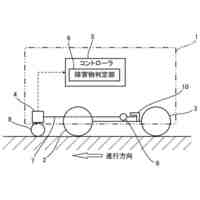
磁気・光学の2重系の誘導路による車両運行システムで、磁気路線の方位制御で運行し、磁気路線上に描かれた画像路線を、車両搭載の監視カメラ路線映像で監視し、両者差異を帰還ループの操舵機構により制御して運行を図るシステムで、路線を遮蔽する障害物の検出と、その距離の検出によりブレーキ距離速度で運行する安全運行システム。
続きを表示(約 4,100 文字)
【背景技術】
【0002】
現在地方都市の域内交手段としては、地下鉄、モノレール、バスが基本となっているが、モノレール、地下鉄は設備規模が過大で、バスは、運行制御は全面的に人に依存し、脱炭素エネルギー化により、変革も求められている。これに対し、磁気、画像誘導による本システムでは、一部高速道路との有機的な接続により高速化図り、効率的な安全を確保した交通網を実現する。
その特徴は、磁気誘導による運行方位制御と車両上に配備した遠近2台の監視カメラで、画像路線の監視追尾による路線上の障害物の検出とその距離を計測し安全運行を実現するほか、障害物が先行車両の場合は、安全ブレーキ距離を取って同速運行による疑似連結運行する。更に、車両スリップ等による磁気誘導路からの車両逸脱時の油圧シリンダーとコイルバネによる制動滑車の路面圧着によるスリップ抑制による安全停止機能を実現する。
また、磁気連結による連結車両を、運行中に解除して、一部車両を分岐路で主基幹駅に自動入構させ残りの車両は分岐路を直行する機能を実現する。
【先行技術文献】
【特許文献】
【0003】
特願2022-092864
特願2022-030608
【発明の概要】
【発明が解決しようとする課題】
【0004】
(イ)都市地方での生活密着交通としては、地下鉄、モノレール、バス、などが現存するが、前2者は設置費用が高額で、路線バスが主体となっている。
(ロ)路線バスは、現在脱炭素の環境整備の観点から全面的な改善が求められている上、遅延も多くy到着時間も不安定である。
(ニ)携帯電話を中心としたAI化技術の近年の急速進展におり、路線上の運行全車両の運行位置情報の掌握により、各停車車の到着時間、目的地到着予定時間を携帯電話、pcで常時表示できる、交通網の設置が必要となっている。
(ホ)混雑する一般道での安全確保は、大きな課題で一部高速道と一般道の相互乗り入れでは、一般
道の混雑緩和に寄与し総合的に効率的な交通機関となる。
【課題を解決するための手段】
【0005】
車両の前方の下部両側に磁気センサーと、車両正面の下部に近距離画像路線監視カメラ、上部に遠距離画像路線監視カメラ及び車両下部に路線監視カメラ を、路面には、誘導磁性体を中心にし、上部に左右で異なる2色の夜光性塗料による画像路線表示を行い、更に、路線表示色と同一色のLED発光体を路線の彎曲部には密に、直線部は数十メートル間隔で配置した誘導路線を左右に2線埋設する。車両の走行によって変わり繰り返し表示される車両監視カメラの表示映像は、1画面演算時間と表示回数の積=単位距離の車両走行時間となり、1台の監視カメラの表示範囲は搭載車両の速力で決まり表示回数は制限される。また、遠近画像路線監視カメラは、必要な監視距離を確保するため、2台の監視カメラの分担表示とする。なお、遠距離監視カメラ は、車両の高速時に必要な監視距離を得るため、距離分解能を低減し、画面表示距離を拡大する。路線監視カメラは、2台の磁気センサーの中央に配置し、車両の下で通常監視出来ない画像路線の中心点を計測する。この画像路線中心点は、画面左端から左右路線までの長さの和の2分の一となり、遠近監視カメラは画像路線部を重視して視角を狭めて、画像路線中心点を算出し、算出結果は数値データとして、総合表示器に送出し連結表示する。車両誘導の基本は、2線の磁気路線の運行で、その路線ズレを無くすため、路線監視カメラで画像路線の中心を求め、その画像路線中心点と磁気センサー方位を、車両の左右中心点と最後の画像走査面から得られる車両運行方位をそれぞれ比較し、それらのズレを車両操舵機構により修正する帰還ループで制御して、確実な気路線運行を保持して車両の安全運行を図る。
LED発光体の点灯は、車両後部に、コイルを巻いた磁気発信体を、磁気路線に面して車両前部に設置し、交流電力で磁化した磁束を路線磁磁性体に送出磁化する。これを路線磁性体に巻いて埋設した磁気受信コイルコイルにより検出受信し、LED点灯切替で点灯制御する。点灯は点滅点灯とし、車両通過時に順次切り替えて車両前方で点滅する。ただし、LED発行体の密接埋設の部分は全LED発光体を同時点滅点灯とする。車両運用域の全路線では、区間ごとに上限走行速度を設定し、全路線の上限速度変更点で、各車両は磁気路線のスリットの断続信号としで区間上限速度情報を受け、各車両は、この上限速度内にて運行する。
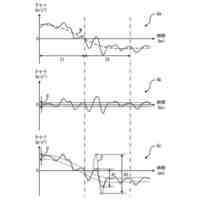
監視カメラ画像は、車両の運行速度が時速60キロメートルでは17m/secで、100キロメートルでは28m/secとなり、この距離を監視距離範囲の最大値となり、近距離の1画面表示範囲を17m、遠距離の1画面表示範囲を28mとし、遠近それぞれの路線中心演算30ms(30分割)とすると、近距離分解能は0.56m 、遠距離分解能0,93mとなる。
【0006】
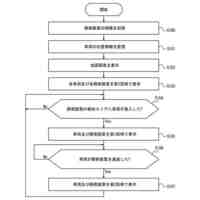
遠近両監視カメラによる画面走査開始点から、車両運行と共に繰り返される画面出力で、方位走査線上に出力される画像路線の2個所の画素の色確認により画像路線中心点を、連続する画面に毎に算出し、分担距離範囲の数値データとして、総合表示器に逐次送出する。方位走査線上の路線色画素の検出は路線中心点から左右車両幅範囲を基準色との比較によって検出する。路線色の検出が数画面で、検出来ない場合は、障害物による遮蔽として、距離走査カウンターの方位線数と画面距離分解能の積として障害物距離を算出する。障害物距離データは車両の走行により急速に変化するが、各速度で設定された速度ブレーキ距離を保持してに減速又は停止する。路線上に先車両がある場合は、速度ブレーキ距離を保持して同速運行する。
車両のスリップ等で、磁気路線の逸脱時には画像路線との不一致による逸脱パルスで停止、又は徐行運行とし、総合表示器上で、路線中心を結ぶ直線方位と車両の左右方位ズレ方位を確認して修復する。交差点など重要路線では、交差点近接時点での磁気路線による減速スリットで減速し、必要により車両の路線変更信号を発信する。路線内に先行車両の有る場合は、その車両による左右画像路線の遮蔽距離を検出して、適正距離にて停止する。先行車両の無い場合は、白色停止線による左右画像路線の遮蔽を検出して停止し、停止時には車両後部路線交流磁化信号によってLED発光体を消灯する。その後発進時には停止線通過後は画像路線の断続パルスによる区間速度情報により点灯する。
路線上の障害物距離の算出は、車両の走行にかかわらず30ms間隔での表示画面で、各画像データの最初の方位出力時から、障害物による路線中心算出不能時までの距離カウンターの数値と距離分解能の積として算出される。ただしこの時間は、車両の減速によって拡大する。
【0007】
連結車両を走行中一部車両の連結を解除し、直進車両と左分岐車両を適正な車線に分離運行させる処理方式で、分岐点の路線は、分岐点直後の左直行路線を寸断し、合わせて右側誘導路線の分岐点直後で左誘導路線を寸断して置く。分岐点を運行する車両は、分岐点手前の磁気スリットパルスにより連結を解除し、同時に直行車両は右磁気センサーで運行制御して直進し、左分岐車両は左磁気センサーによって運行制御して左車線に入行する処理方式。一部車両を右分岐入行させる場合についても、左右反転した同一処理とする。
【0008】
)
スリップ抑止板に固定された支柱を、限定された回転角の軸受け基盤によって車両前方の下部で車両進路に平行して取り付ける。スリップ抑止板には、内部の左右の嵌め込みガイド内で個別に上下する制動滑車を設ける。制動滑車は、回転を抑制された複数の制動ゴマと、これを路面に圧着するコイルバネ及び油圧シリンダーで構成され、上部のスリップ抑止板の構成枠に油圧シリンダーを介して取り付ける。通常、制動滑車は、油圧シリンダーにより、持ち上げ路面から離隔保持する。制動滑車の制動ゴマは横滑りを抑止のため縦溝を設ける。車両スリップ時などには油圧シリンダーにより制動滑車を路面に圧着制御するが、車両の正規進路とのズレ方位情報により、左ズレには右、右ズレには左の制動滑車を路面に圧着制御して停止する。この操作による制動滑車の作動により、スリップ抑止板の支柱回転部が規定の角度範囲で回転して停止する。更に前面スリップの場合は両サイド制動滑車を路面に圧着制御し停止する。その後総合画上で、車両を正常路線方位に徐行して復帰する。
【発明の効果】
【0009】
(イ)専用高速道路の各駅を基幹駅で一般道と結び高速道内では、自動運転とし、車両を行く先別乗車とし、目的地の各基幹駅では、走行中に分岐路手前で順次に連結を切って目的駅に自動入構し、乗客の目的地直行による高速運行をする。
(ロ)磁気路線で運行する各車両の運行方位を画像路線で監視し、ズレを操舵機構を含む帰還ループによって制御し、安全運行を実現する。
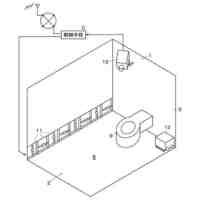
(ハ)路線上の要所でとなる加速、減速ポイントの磁気誘導路線にスリットを設け、磁気センサーからのパルス信号により各路線の運行上限速度、各車両に与え、併せて路線上の各車両の運行位置状況を送出し、管理センターで掌握する。
(二) 一般道の路線画像表示には、夜間、雨天時の路線位置を明示するため、路線表示色のLED発光体を数十メートル間隔で埋め込み路線位置を明示し、一般車両に対しての注意を喚起する。
【図面の簡単な説明】
【0010】
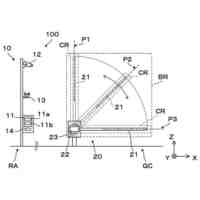
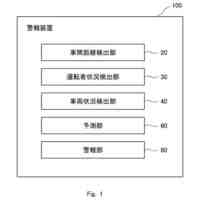
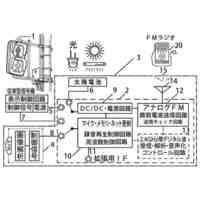
磁気・画像路線確認走行方式
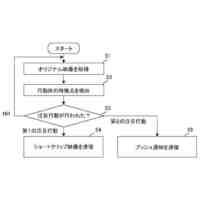
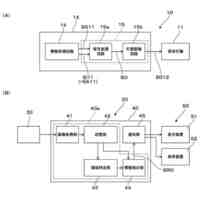
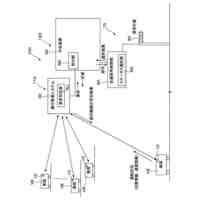
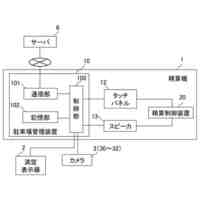
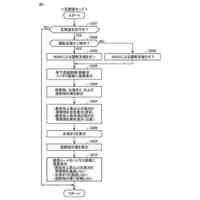
画像処理と運行制御
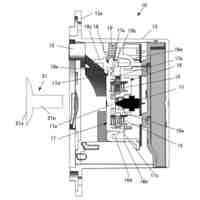
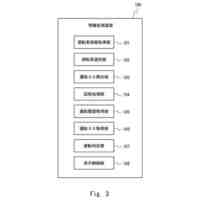
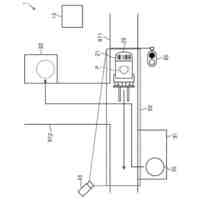
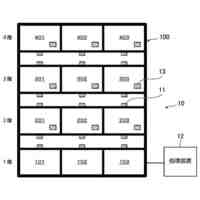
基幹駅の路線構成
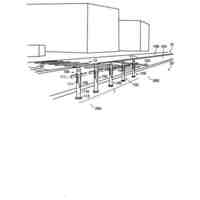
スリップ抑止板
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
路面投影装置
1か月前
ニッタン株式会社
発信機
2日前
ニッタン株式会社
発信機
今日
個人
防犯に特化したアプリケーション
1か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
東京都公立大学法人
液滴検出装置
1か月前
トヨタ自動車株式会社
車両
1日前
TOA株式会社
拡声放送システム
1か月前
日本信号株式会社
情報提供システム
29日前
株式会社アジラ
データ転送システム
1か月前
アズビル株式会社
建物管理システム
2か月前
個人
乗り物の移動を支援する方法及び装置
22日前
株式会社JVCケンウッド
警報装置
1か月前
日本信号株式会社
信号情報システム
29日前
ホーチキ株式会社
異常報知設備
2か月前
株式会社JVCケンウッド
情報処理装置
1か月前
トヨタ自動車株式会社
回避動作判別装置
29日前
個人
現示内容に関する情報放送機能付き信号機
10日前
日本信号株式会社
交通信号制御システム
29日前
本田技研工業株式会社
運転評価装置
7日前
株式会社豊田自動織機
制御システム
1か月前
ホーチキ株式会社
火災検出システム
1か月前
本田技研工業株式会社
情報提供装置
1日前
本田技研工業株式会社
情報提供装置
1日前
ユニティガードシステム株式会社
警備監視システム
2か月前
トヨタ自動車株式会社
障害物検知装置
1か月前
本田技研工業株式会社
保険料算出装置
7日前
Adora株式会社
アプリ使用制御システム
2か月前
トヨタ自動車株式会社
方法
28日前
シャープ株式会社
駐車場管理装置
2か月前
トヨタ自動車株式会社
方法
14日前
能美防災株式会社
火災感知器窓部清掃システム
1か月前
大和ハウス工業株式会社
住環境管理設備
1か月前
個人
注意喚起システム及び注意喚起装置
1か月前
トヨタ自動車株式会社
車両
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ