TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071245
公報種別
公開特許公報(A)
公開日
2025-05-02
出願番号
2025025866,2021198523
出願日
2025-02-20,2021-12-07
発明の名称
移動体制御装置、移動体制御方法、およびプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
40/06 20120101AFI20250424BHJP(車両一般)
要約
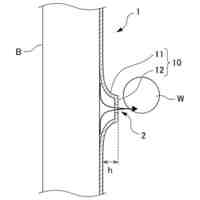
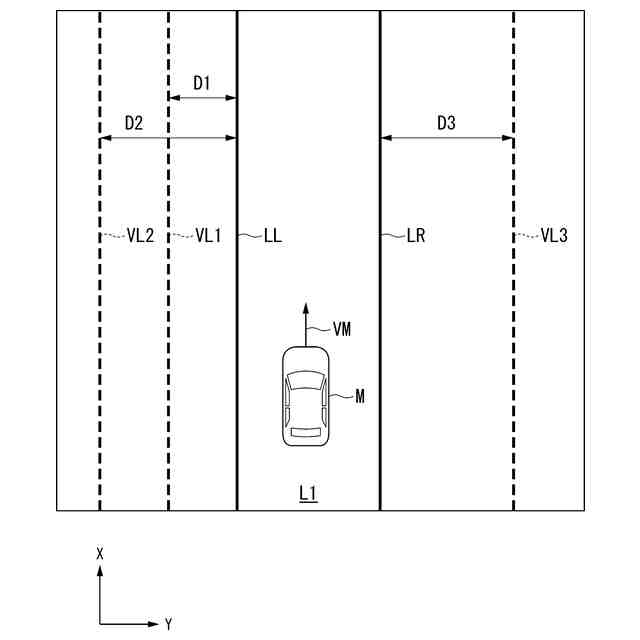
【課題】自車両が走行する走行レーンを区画する区画線をより正確に認識することができる移動体制御装置、移動体制御方法、およびプログラムを提供する。
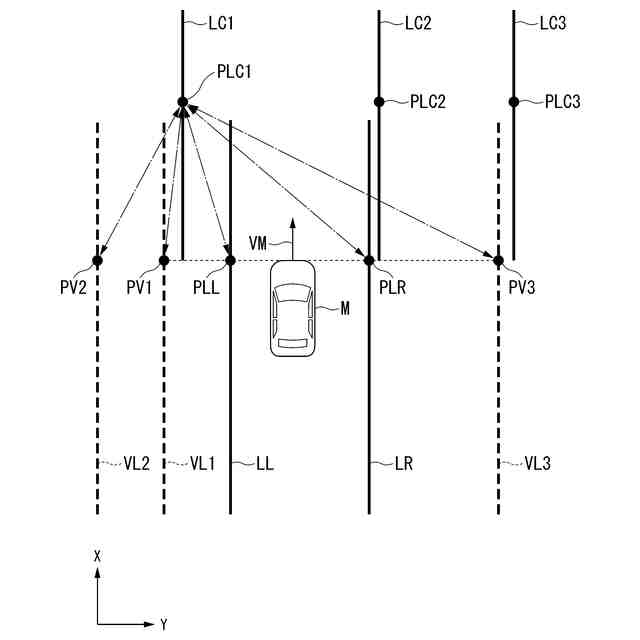
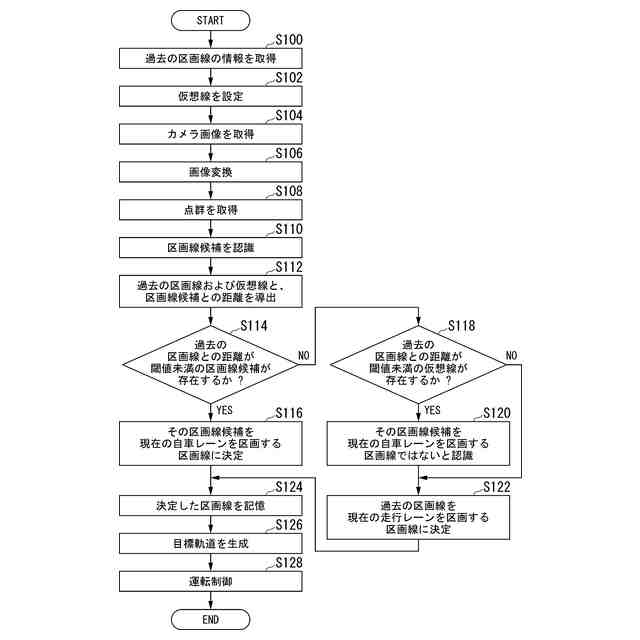
【解決手段】実施形態の移動体制御装置は、撮像部により撮像された移動体の周辺を含む画像から前記移動体が走行する走行レーンを区画する区画線の候補を認識する区画線候補認識部と、過去に前記走行レーンを区画する区画線として認識された区画線よりも前記移動体からみて外側に少なくとも一以上の仮想線を設定する仮想線設定部と、前記区画線候補認識部により認識された区画線候補と、前記一以上の仮想線とに基づいて、前記移動体の現在の走行レーンを区画する区画線を探索する区画線探索部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
撮像部により撮像された移動体の周辺を含む画像から前記移動体が走行する走行レーンを区画する区画線の候補を認識する区画線候補認識部と、
過去に前記走行レーンを区画する区画線として認識された区画線よりも前記移動体からみて外側に少なくとも一以上の仮想線を設定する仮想線設定部と、
前記区画線候補認識部により認識された区画線候補と、前記一以上の仮想線とに基づいて、前記移動体の現在の走行レーンを区画する区画線を探索する区画線探索部と、
を備える移動体制御装置。
続きを表示(約 470 文字)
【請求項2】
移動体制御装置のコンピュータが、
撮像部により撮像された移動体の周辺を含む画像から前記移動体が走行する走行レーンを区画する区画線の候補を認識し、
過去に前記走行レーンを区画する区画線として認識された区画線よりも前記移動体からみて外側に少なくとも一以上の仮想線を設定し、
認識した前記区画線の候補と、設定した前記一以上の仮想線とに基づいて、前記移動体の現在の走行レーンを区画する区画線を探索する、
移動体制御方法。
【請求項3】
移動体制御装置のコンピュータに、
撮像部により撮像された移動体の周辺を含む画像から前記移動体が走行する走行レーンを区画する区画線の候補を認識させ、
過去に前記走行レーンを区画する区画線として認識された区画線よりも前記移動体からみて外側に少なくとも一以上の仮想線を設定させ、
認識された前記区画線の候補と、設定された前記一以上の仮想線とに基づいて、前記移動体の現在の走行レーンを区画する区画線を探索させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体制御装置、移動体制御方法、およびプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
近年、車両の走行を自動的に制御する自動運転に関する研究が進められている。これに関連して、車両の周囲の状況を検出するセンサにより認識された車両の周囲のレーンと、車両の位置および姿勢に基づいて地図データから取得した車両の周囲のレーンとに基づいて、レーンの配置を調整する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-55414号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、車両の周囲の状況を検出するセンサによる認識の不安定さにより、認識中の区画線の近傍に区画線に類似した形状の線が認識された場合に、その線を自車両の走行レーンを区画する区画線と誤認識する可能性があった。
【0005】
本発明の態様は、このような事情を考慮してなされたものであり、自車両が走行する走行レーンを区画する区画線をより正確に認識することができる移動体制御装置、移動体制御方法、およびプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る移動体制御装置、移動体制御方法、およびプログラムは、以下の構成を採用した。
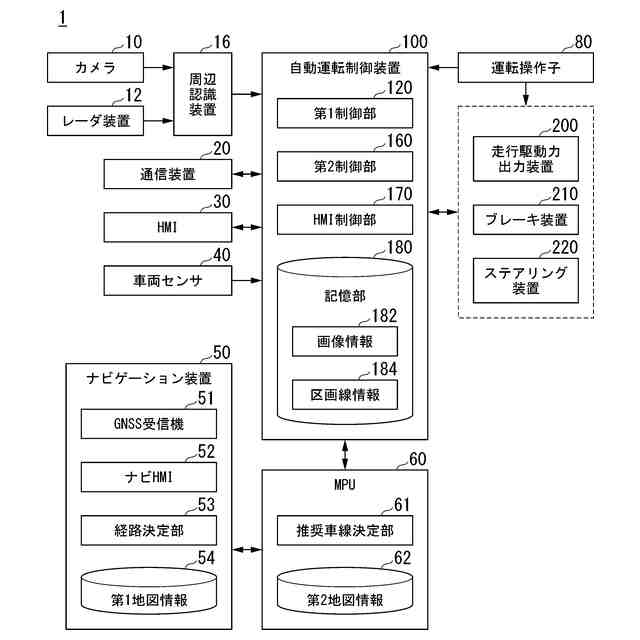
(1):この発明の一態様に係る移動体制御装置は、撮像部により撮像された移動体の周辺を含む画像から前記移動体が走行する走行レーンを区画する区画線の候補を認識する区画線候補認識部と、過去に前記走行レーンを区画する区画線として認識された区画線よりも前記移動体からみて外側に少なくとも一以上の仮想線を設定する仮想線設定部と、前記区画線候補認識部により認識された区画線候補と、前記一以上の仮想線とに基づいて、前記移動体の現在の走行レーンを区画する区画線を探索する区画線探索部と、を備える移動体制御装置である。
【0007】
(2):上記(1)の態様において、前記仮想線設定部は、前記移動体の現在の走行レーンを含む道路の境界が存在すると予測される位置に前記仮想線を設定するものである。
【0008】
(3):上記(1)または(2)の態様において、前記仮想線設定部は、過去に前記走行レーンを区画する区画線として認識された区画線から所定距離だけ離れた位置に仮想線を設定するものである。
【0009】
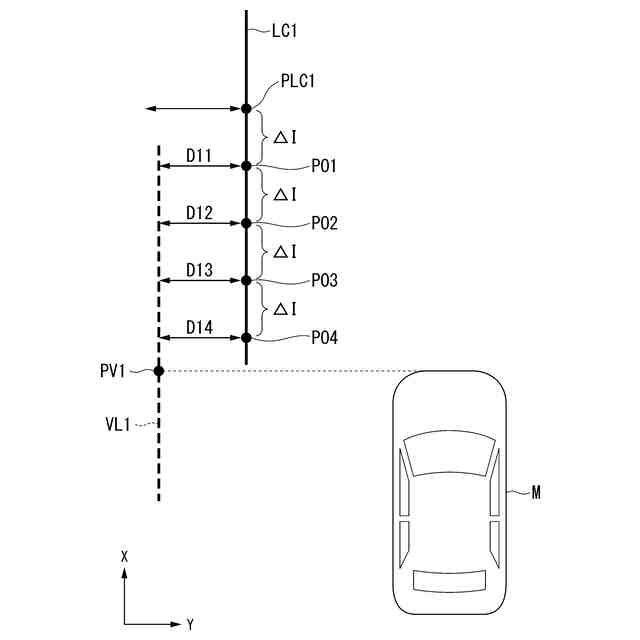
(4):上記(1)~(3)のうち何れか一つの態様において、前記区画線探索部は、前記区画線候補のうち、前記過去に前記走行レーンを区画する区画線と最も近い区画線候補を前記移動体の現在の走行レーンを区画する区画線として決定するものである。
【0010】
(5):上記(1)~(4)のうち何れか一つの態様において、前記区画線探索部は、前記区画線候補のうち、前記仮想線との距離が所定距離以内にある区画線候補を前記移動体の現在の走行レーンを区画する区画線として決定しないものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
ドア
3日前
本田技研工業株式会社
加工装置
3日前
本田技研工業株式会社
全固体電池
3日前
本田技研工業株式会社
車体前部構造
3日前
本田技研工業株式会社
車体前部構造
3日前
本田技研工業株式会社
放射冷却装置
11日前
本田技研工業株式会社
電池モジュール
3日前
本田技研工業株式会社
車両用ドア構造
3日前
本田技研工業株式会社
車両用シール構造
3日前
本田技研工業株式会社
二次電池の製造方法
7日前
本田技研工業株式会社
電解質材料の選択方法
3日前
本田技研工業株式会社
ウインドスクリーン装置
4日前
本田技研工業株式会社
加工装置及び加工プロセス
3日前
本田技研工業株式会社
プログラム及び情報管理装置
11日前
本田技研工業株式会社
プログラム及び情報管理装置
11日前
本田技研工業株式会社
エージェント装置用プログラム
4日前
本田技研工業株式会社
高圧タンク、その製造方法及びその製造装置
5日前
本田技研工業株式会社
情報提供装置、情報提供方法、およびプログラム
3日前
本田技研工業株式会社
運転支援装置、運転支援方法、およびプログラム
5日前
本田技研工業株式会社
自エージェントを支援するための方法、プログラム、記憶媒体および支援システム、ならびに車両
5日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、およびプログラム
3日前
本田技研工業株式会社
制御装置、制御システム、制御方法、及び制御プログラム
3日前
個人
飛行自動車
2か月前
個人
警告装置
19日前
個人
小型EVシステム
21日前
日本精機株式会社
ケース
27日前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
株式会社松華
懸架装置
1か月前
個人
ブレーキシステム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ