TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073840
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023184949
出願日
2023-10-27
発明の名称
非破壊検査システム及び非破壊検査方法
出願人
株式会社東芝
,
東芝エネルギーシステムズ株式会社
代理人
弁理士法人東京国際特許事務所
主分類
G01N
29/265 20060101AFI20250502BHJP(測定;試験)
要約
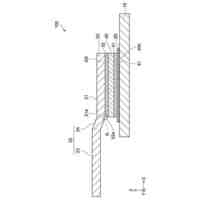
【課題】検査信号を取得するプローブの実測位置が検査に必要な位置と完全には一致しない場合でも、この実測位置を検査に必要な位置として、この実測位置でのプローブによる検査信号を記録できること。
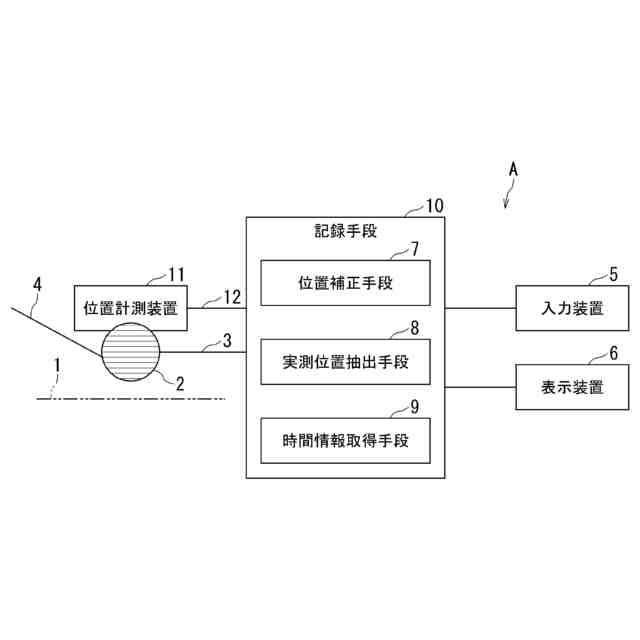
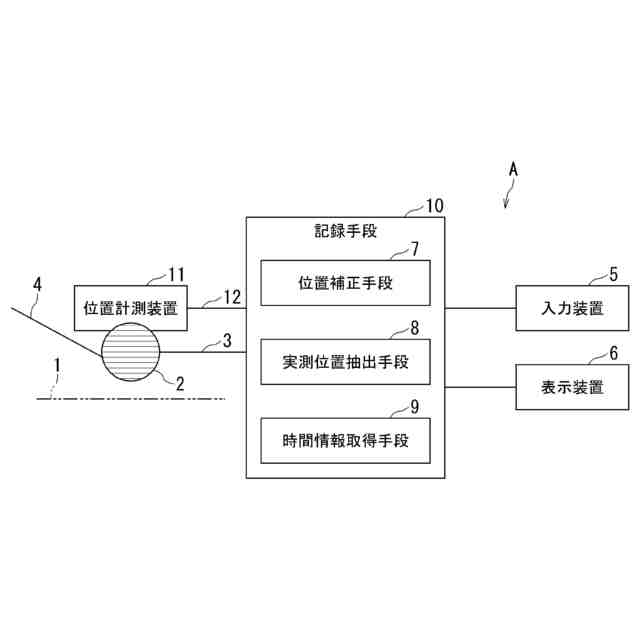
【解決手段】検査対象1に対し超音波信号3を取得するプローブ2と、プローブの位置情報を計測して実測位置12として出力する位置計測装置11と、プローブからの超音波信号及び位置計測装置からの実測位置を記録する記録手段10と、を有する超音波探傷システムAであって、更に記録手段10は、検査対象の表面形状を基に任意の目標位置を設定し、この目標位置に対する誤差として許容する誤差許容範囲を設定し、実測位置が誤差許容範囲内に位置すると判定した場合に、この位置すると判定した実測位置を目標位置として認定し、この目標位置として認定した実測位置にてプローブが取得した超音波信号を、目標位置の超音波信号として記録するものである。
【選択図】図1
特許請求の範囲
【請求項1】
検査対象に対して検査信号を取得するプローブと、
前記プローブの位置情報を計測して実測位置として出力する位置計測装置と、
前記プローブからの前記検査信号及び前記位置計測装置からの前記実測位置を入力して記録する記録手段と、を有する非破壊検査システムであって、
前記記録手段は、前記検査対象の表面形状を基に任意の目標位置を設定し、前記目標位置に対する誤差として許容する誤差許容範囲を設定し、前記実測位置が前記誤差許容範囲内に位置すると判定した場合に、この位置すると判定した実測位置にて前記プローブが取得した前記検査信号を、前記目標位置の前記検出信号として記録するよう構成されたことを特徴とする非破壊検査システム。
続きを表示(約 1,200 文字)
【請求項2】
前記記録手段は、誤差許容範囲内に位置すると判定した実測位置を目標位置として認定し、この目標位置として認定した実測位置における検査信号を処理して、前記目標位置に対応する2次元または3次元の探傷結果画像に変換するよう構成されたことを特徴とする請求項1に記載の非破壊検査システム。
【請求項3】
前記記録手段は、誤差許容範囲内に位置すると判定した実測位置を目標位置として認定し、この目標位置として認定した実測位置における検査信号を処理して、前記目標位置における検査対象の形状情報に変換するよう構成されたことを特徴とする請求項1に記載の非破壊検査システム。
【請求項4】
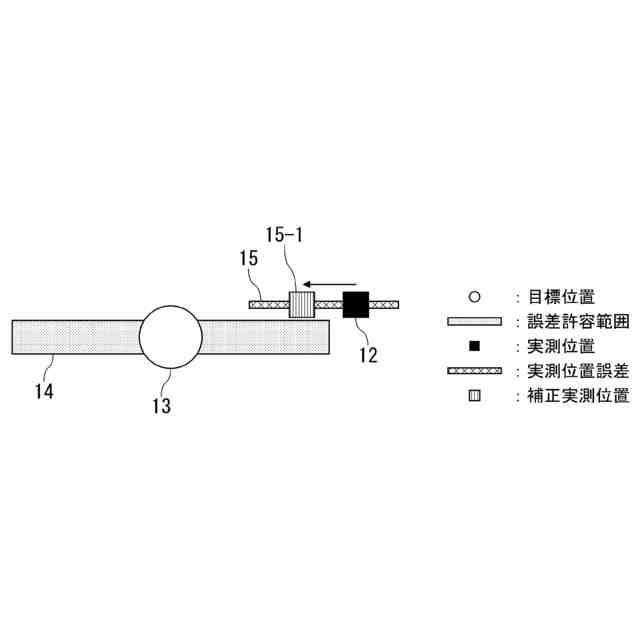
前記記録手段は、目標位置と、誤差許容範囲を用いて前記目標位置として認定した実測位置との距離を誤差として算出し、前記実測位置における前記誤差を補正する位置補正手段を備えて構成されたことを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
【請求項5】
前記記録手段は、1つの目標位置に設定する誤差許容範囲内に複数の実測位置を記録した場合に、複数の前記実測位置から適切な前記実測位置を抽出する実測位置抽出手段を備えて構成されたことを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
【請求項6】
前記記録手段は、任意の目標プローブ角を設定し、この目標プローブ角に基づいて誤差として許容する誤差許容プローブ角範囲を設定し、
実測位置に含まれる実測プローブ角が前記誤差許容プローブ角範囲内に位置すると判定した場合に、この位置すると判定した前記実測位置にてプローブが取得した検査信号を、前記実測位置と共に記録するよう構成されたことを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
【請求項7】
前記記録手段は、位置計測装置について時間情報を取得する時間情報取得手段を備えて構成されたことを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
【請求項8】
前記プローブが、自己位置取得手段を持たない走査手段によって走査されるよう構成されたことを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
【請求項9】
前記記録手段は、位置計測装置による実測位置の出力の際に発生する実測位置誤差を設定し、この実測位置誤差の範囲内にある任意の位置を、前記実測位置を補正した補正実測位置として出力するよう構成されたことを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
【請求項10】
前記プローブが取得する検査信号は、超音波探傷試験における超音波信号、または渦電流探傷試験による渦電流信号であることを特徴とする請求項1乃至3のいずれか1項に記載の非破壊検査システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、非破壊検査システム及び非破壊検査方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
超音波探傷試験(Ultrasonic Testing:UT)や渦電流探傷試験(Eddy Current Testing:ECT)は、非破壊で構造材の表面及び内部の健全性を確認できる技術であり、様々な分野で欠かせない非破壊検査技術となっている。
【先行技術文献】
【特許文献】
【0003】
特開2020-112547号公報
特許第6296173号公報
特開2022―158417号公報
特開2023-136390号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
UT等により非破壊で構造材の健全性を評価するには、検査結果だけでなく、検査結果の取得位置の記録が求められる。これまで位置情報のデジタルデータ取得のために、スキャナ等の自動制御器が用いられてきた(特許文献1)。しかしながら、例えばUTでは、自動制御器の取り付け作業が煩雑であること等により、手動を含む走査手段では、自己位置計測装置を持たない走査手段が一般的であり、位置はデジタルに記録されていなかった。
【0005】
近年、自己位置計測装置を持たない走査手段を用いたUTに利用可能な、デジタルでの位置計測装置が提案されている(特許文献2、3、4)。このうちの特許文献2は、対象物と超音波探傷プローブとの間にシートを挟むという技術である。手動等での走査手段のように、自己位置取得手段(自己位置計測装置)を持たない走査手段を用いたUTやECTでは、位置計測装置及び走査手段のそれぞれに誤差があり、検査に必要な位置と完全には一致しない位置での記録が一般的である。
【0006】
本発明の実施形態は、上述の事情を考慮してなされたものであり、検査信号を取得するプローブの実測位置が検査に必要な位置と完全には一致しない場合でも、この実測位置を検査に必要な位置として、この実測位置でのプローブによる検査信号を記録することができる非破壊検査システム及び非破壊検査方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の実施形態における非破壊検査システムは、検査対象に対して検査信号を取得するプローブと、前記プローブの位置情報を計測して実測位置として出力する位置計測装置と、前記プローブからの前記検査信号及び前記位置計測装置からの前記実測位置を入力して記録する記録手段と、を有する非破壊検査システムであって、前記記録手段は、前記検査対象の表面形状を基に任意の目標位置を設定し、前記目標位置に対する誤差として許容する誤差許容範囲を設定し、前記実測位置が前記誤差許容範囲内に位置すると判定した場合に、この位置すると判定した実測位置にて前記プローブが取得した前記検査信号を、前記目標位置の前記検出信号として記録するよう構成されたことを特徴とするものである。
【0008】
本発明の実施形態における非破壊検査方法は、検査対象に対して検査信号を取得するプローブと、前記プローブの位置情報を計測して実測位置として出力する位置計測装置と、前記プローブからの前記検査信号及び前記位置計測装置からの前記実測位置を入力して記録する記録手段と、を有する非破壊検査システムを準備し、前記記録手段が前記検査対象の表面形状を基に任意の目標位置を設定するステップと、前記記録手段が前記目標位置に対する誤差として許容する誤差許容範囲を設定するステップと、前記記録手段が、前記実測位置が前記誤差許容範囲内に位置すると判定した場合に、この位置すると判定した実測位置にて前記プローブが取得した前記検査信号を、前記目標位置の前記検出信号として記録するステップと、を順次実施することを特徴とするものである。
【発明の効果】
【0009】
本発明の実施形態によれば、検査信号を取得するプローブの実測位置が検査に必要な位置と完全には一致しない場合でも、この実測位置を検査に必要な位置として、この実測位置でのプローブによる検査信号を記録することができる。
【図面の簡単な説明】
【0010】
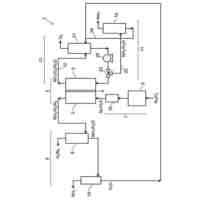
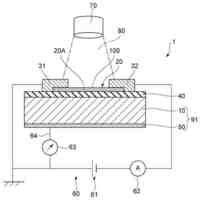
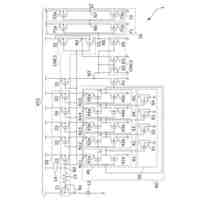
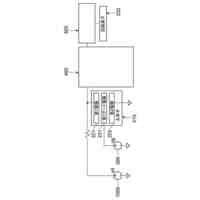
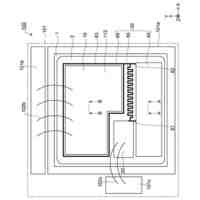
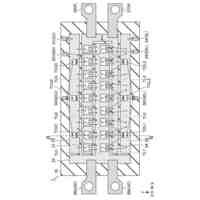
第1実施形態に係る非破壊検査システムとしての超音波探傷システムの構成を示すブロック図。
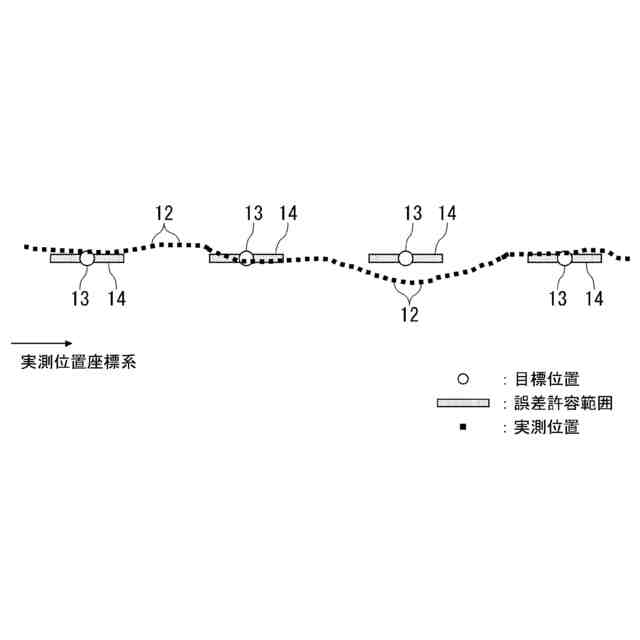
図1の超音波探傷システムにおける記録状況に関する基本図。
図1の記録手段による実測位置誤差の設定に関する説明図。
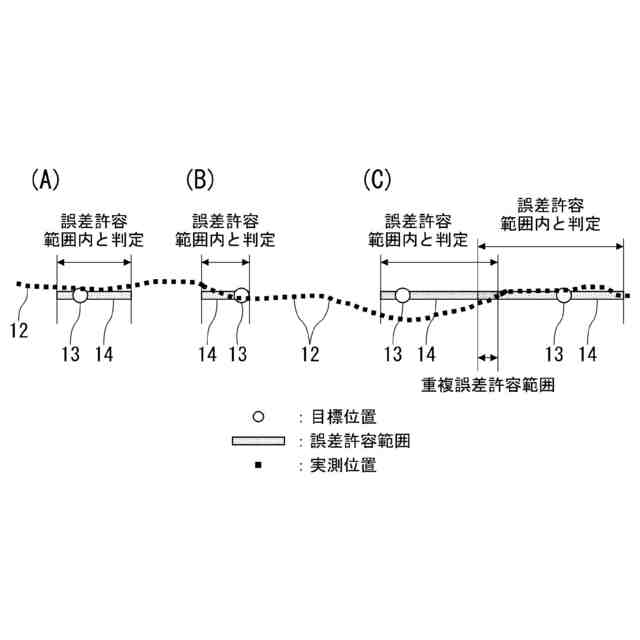
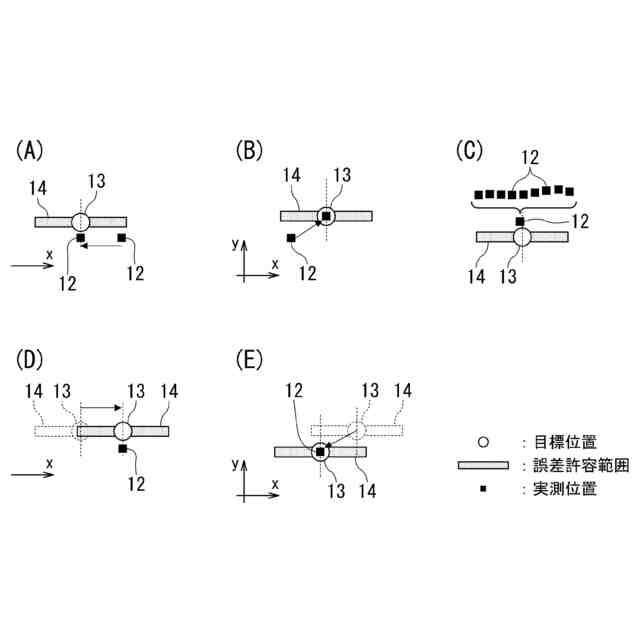
図2の誤差許容範囲の種類に関する説明図。
図1の位置補正手段による位置補正の種類に関する説明図。
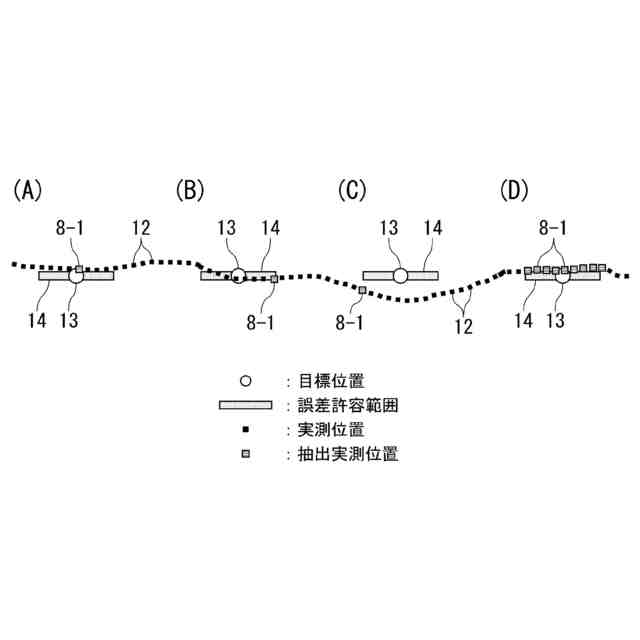
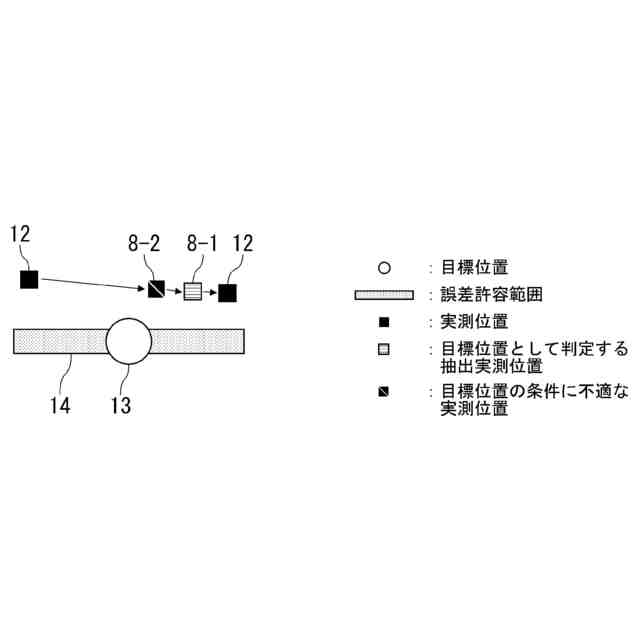
図1の実測位置抽出手段による実測位置抽出の種類に関する説明図。
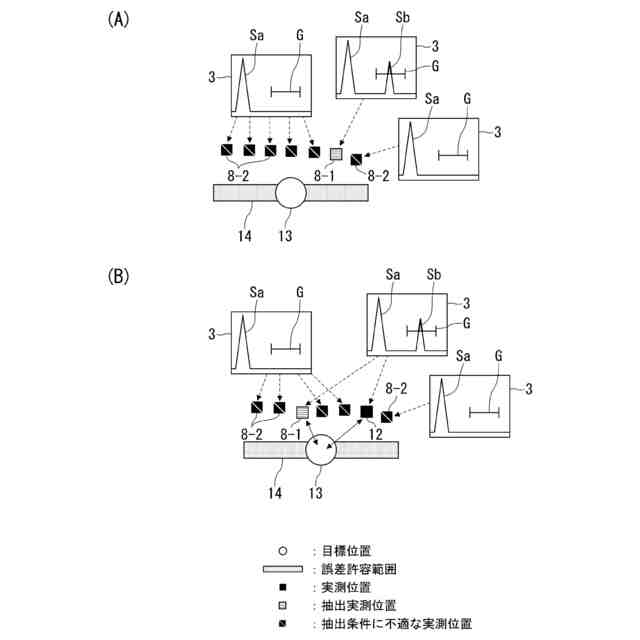
図1の実測位置抽出手段による抽出条件を用いた実測位置の抽出に関する説明図。
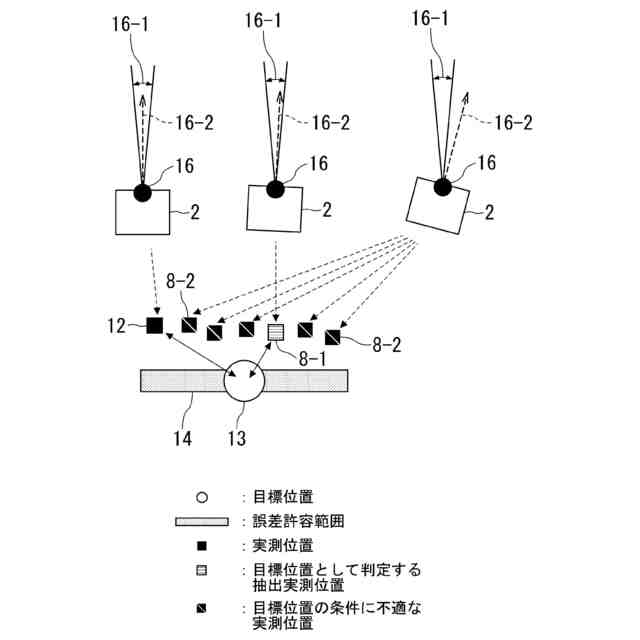
図1の記録手段による回転計測装置を用いた実測位置の抽出に関する説明図。
図1の時間情報取得手段による時間情報に基づいた実測位置の抽出に関する説明図。
図1の記録手段による超音波波形の探傷結果画像(Bスコープ)への変換に関する説明図。
図1の記録手段による超音波波形の形状情報への変換に関する説明図。
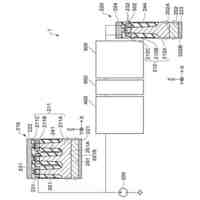
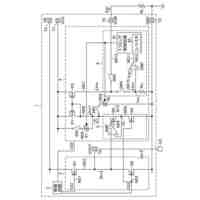
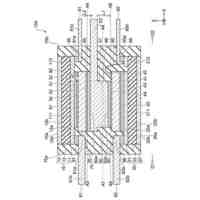
第2実施形態に係る非破壊検査システムとしての超音波探傷システムの構成を示すブロック図。
図12の超音波探傷システムにおける記録状況に関する基本図。
図12の記録手段による実測位置誤差の設定に関する説明図。
図13の誤差許容範囲の種類に関する説明図。
図13の誤差許容範囲について重複する誤差許容範囲に関する説明図。
図12の位置補正手段による位置補正の種類に関する説明図。
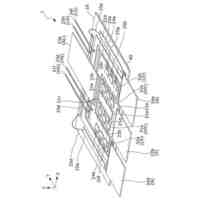
図12の記録手段による超音波波形の立体探傷画像への変換に関する説明図。
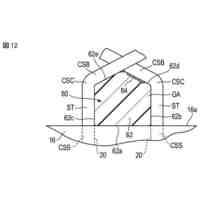
図12の記録手段による超音波波形の探傷結果画像(Cスコープ)への変換に関する説明図。
第3実施形態に係る非破壊検査システムとしての超音波探傷システムの構成を示すブロック図。
図20の超音波探傷システムにおける記録状況に関する基本図。
図20の記録手段による実測位置誤差の設定に関する説明図。
図21の誤差許容範囲の種類に関する説明図。
図21の誤差許容範囲について重複する誤差許容範囲に関する説明図。
図20の位置補正手段による位置補正の種類に関する説明図。
図20の記録手段による曲面形状の検査対象における超音波波形の立体探傷画像への変換に関する説明図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
2日前
株式会社東芝
電解装置
1か月前
株式会社東芝
回転電機
28日前
株式会社東芝
測距装置
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
受光装置
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
28日前
株式会社東芝
発振回路
1か月前
株式会社東芝
回転電機
28日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
24日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
6日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ