TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025076648
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188379
出願日
2023-11-02
発明の名称
自動搬送ロボット
出願人
株式会社フジタ
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
G05D
1/43 20240101AFI20250509BHJP(制御;調整)
要約
【課題】安定走行が可能な自動搬送ロボット、および自動搬送ロボットを用いて搬送対象物を搬送する方法を提供すること。
【解決手段】自動搬送ロボットは、駆動機構、昇降ユニット、測距センサ、および制御部を備える。昇降ユニットは、搬送対象物を持ち上げるように構成される。測距センサは、進行方向に存在する障害物を検知するように構成される。制御部は、駆動機構、昇降ユニット、および測距センサを制御するように構成される。制御部は、さらに、自動搬送ロボットが直進する場合、測距センサの検知範囲を、自動搬送ロボットのロール軸に対して対称となるように、進行方向に設定すること、および自動搬送ロボットが左折または右折する場合、検知範囲をロール軸に対して非対称な形状に変更することを実行するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
駆動機構、
搬送対象物を持ち上げるように構成される昇降ユニット、
進行方向に存在する障害物を検知するように構成される測距センサ、ならびに
前記駆動機構、前記昇降ユニット、および前記測距センサを制御するように構成される制御部を備える自動搬送ロボットであり、
前記制御部は、さらに、
前記自動搬送ロボットが直進する場合、前記測距センサの検知範囲を、前記自動搬送ロボットのロール軸に対して対称となるように、前記進行方向に設定すること、および
前記自動搬送ロボットが左折または右折する場合、前記検知範囲を前記ロール軸に対して非対称な形状に変更することを実行するように構成される、自動搬送ロボット。
続きを表示(約 580 文字)
【請求項2】
前記自動搬送ロボットが左折する場合の前記変更は、前記検知範囲のうち、前記進行方向に向かって右前方の一部を排除することで行われる、請求項1に記載の自動搬送ロボット。
【請求項3】
前記自動搬送ロボットが右折する場合の前記変更は、前記検知範囲のうち、前記進行方向に向かって左前方の一部を排除することで行われる、請求項1に記載の自動搬送ロボット。
【請求項4】
前記検知範囲は、前記自動搬送ロボットが移動する床上、または前記床から離隔し、かつ前記床に対して平行に設定される、請求項1に記載の自動搬送ロボット。
【請求項5】
前記変更前の前記検知範囲は、四角形である、請求項1に記載の自動搬送ロボット。
【請求項6】
前記変更後の前記検知範囲は、六角形である、請求項1に記載の自動搬送ロボット。
【請求項7】
前記自動搬送ロボットが移動する床上に位置するガイドラインを検知する追従センサをさらに備える、請求項1に記載の自動搬送ロボット。
【請求項8】
前記駆動機構は、クローラを含む、請求項1に記載の自動搬送ロボット。
【請求項9】
前記駆動機構は、前記自動搬送ロボットが移動する床と接する複数の車輪を含む、請求項1に記載の自動搬送ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態の一つは、自動搬送ロボット、および自動搬送ロボットを用いる搬送対象物の搬送方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
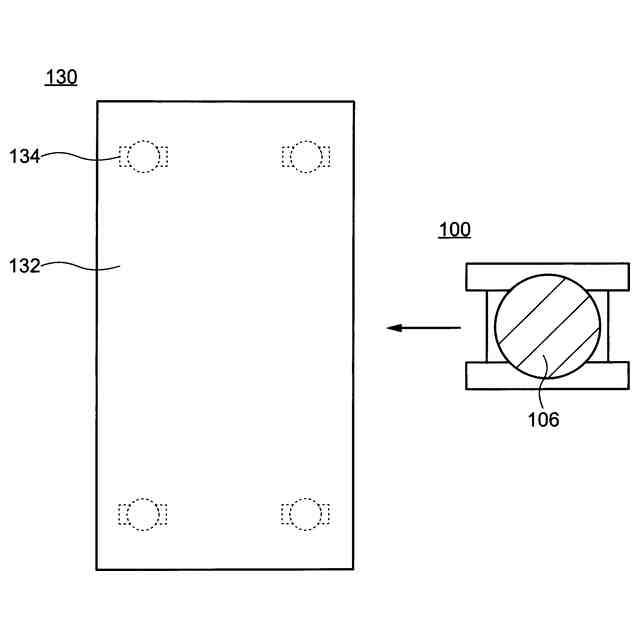
近年、自動搬送車(AGV:Automatic Guided Vehicle)の技術開発が進み、例えば工事現場や建設現場などにおいて工事資材や建設資材を搬送するための資材台車(以下、単に台車と記す)を自動搬送する自動搬送ロボットが開発されるに至っている。例えば特許文献1から3に開示された自動搬送ロボットは、台車の荷台の下に潜り込んだ後に荷台を持ち上げ、この状態で自動走行する。自動搬送ロボットを自動走行させながら資材を搬送することで、資材搬送のための人的資源が節約できる。
【先行技術文献】
【特許文献】
【0003】
特開2019-59460号公報
特開2023-138055号公報
特開2023-136097号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の実施形態の一つは、新規構成を備える自動搬送ロボット、および当該自動搬送ロボットを用いて資材などの搬送対象物を搬送する方法を提供することを課題の一つとする。あるいは、本発明の実施形態の一つは、搬送対象物を搬送するための搬送路が狭い場合であっても、安定走行が可能な自動搬送ロボット、および当該自動搬送ロボットを用いて搬送対象物を搬送する方法を提供することを課題の一つとする。
【課題を解決するための手段】
【0005】
本発明の実施形態の一つは、自動搬送ロボットである。この自動搬送ロボットは、駆動機構、昇降ユニット、測距センサ、および制御部を備える。昇降ユニットは、搬送対象物を持ち上げるように構成される。測距センサは、進行方向に存在する障害物を検知するように構成される。制御部は、駆動機構、昇降ユニット、および測距センサを制御するように構成される。制御部は、さらに、自動搬送ロボットが直進する場合、測距センサの検知範囲を、自動搬送ロボットのロール軸に対して対称となるように、進行方向に設定すること、および自動搬送ロボットが左折または右折する場合、検知範囲をロール軸に対して非対称な形状に変更することを実行するように構成される。
【0006】
本発明の実施形態の一つは、搬送対象物を自動搬送ロボットによって搬送する方法である。この方法は、自動搬送ロボットの進行方向に位置する障害物を検知する測距センサの検知範囲を、自動搬送ロボットが直進する場合には自動搬送ロボットのロール軸に対して対称になるように設定し、自動搬送ロボットが左折または右折する場合にはロール軸に対して非対称な形状に変更することを含む。
【図面の簡単な説明】
【0007】
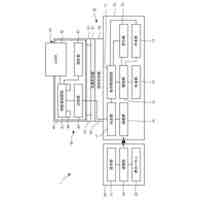
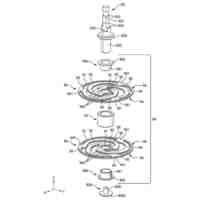
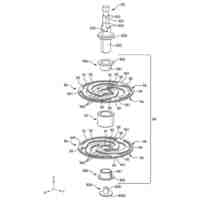
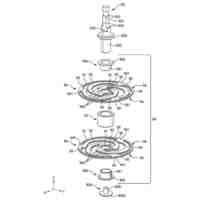
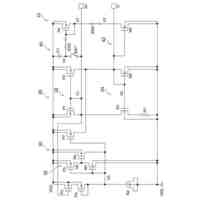
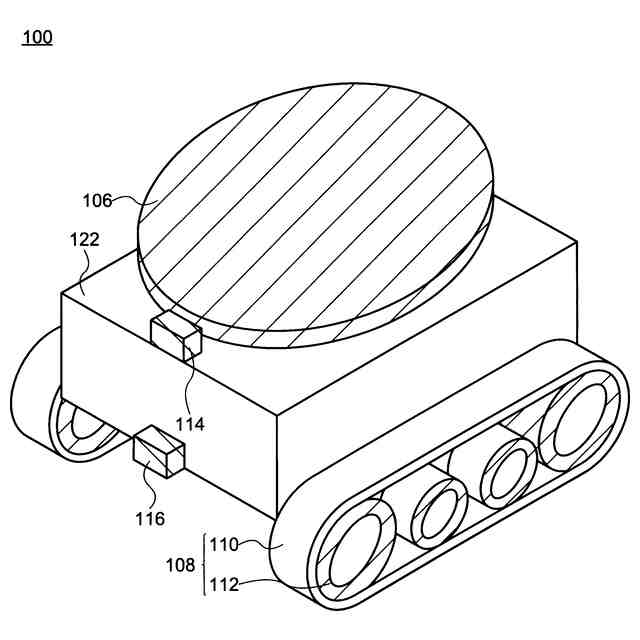
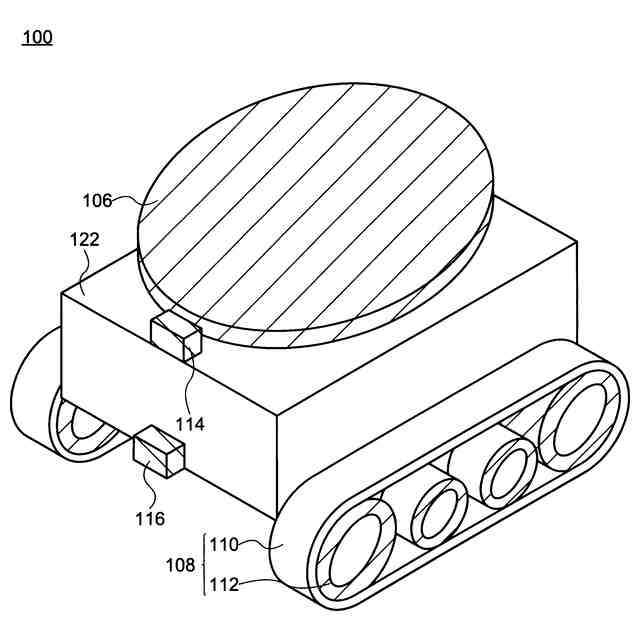
本発明の実施形態の一つに係る自動搬送ロボットの模式的斜視図。
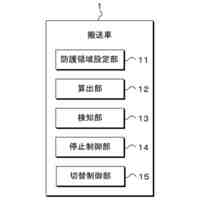
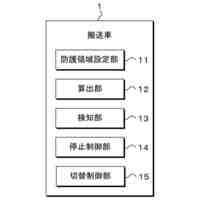
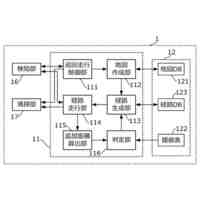
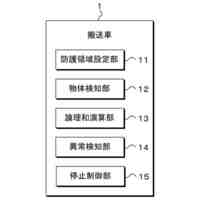
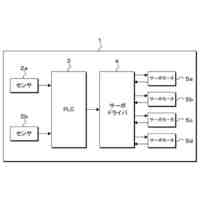
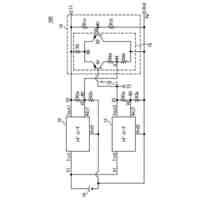
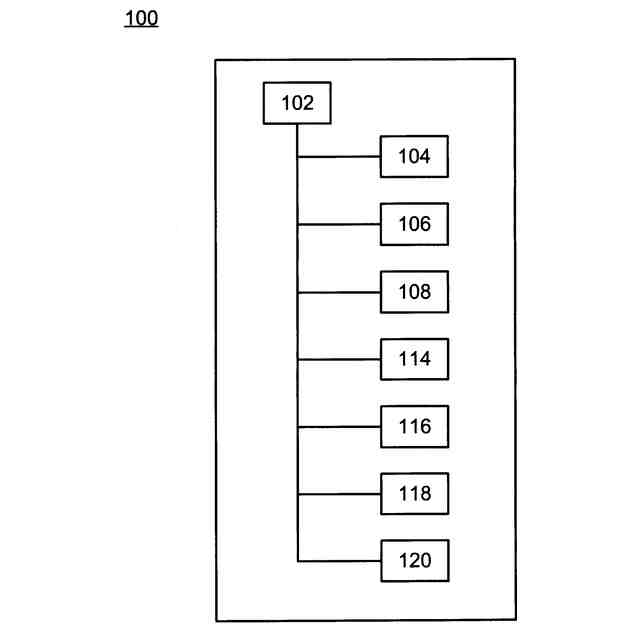
本発明の実施形態の一つに係る自動搬送ロボットの機能ブロック図。
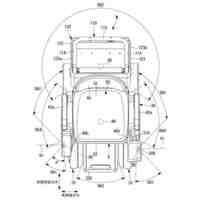
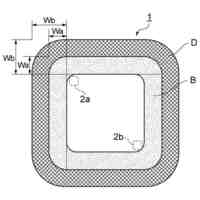
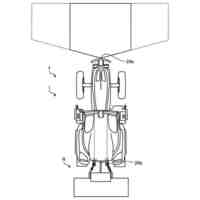
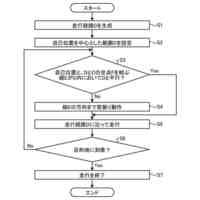
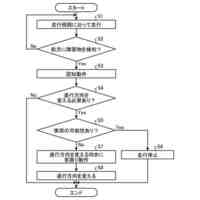
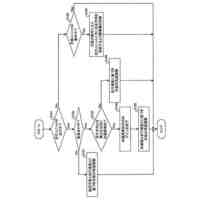
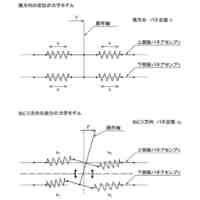
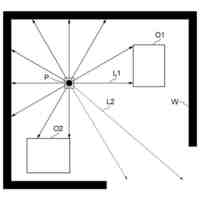
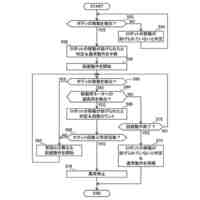
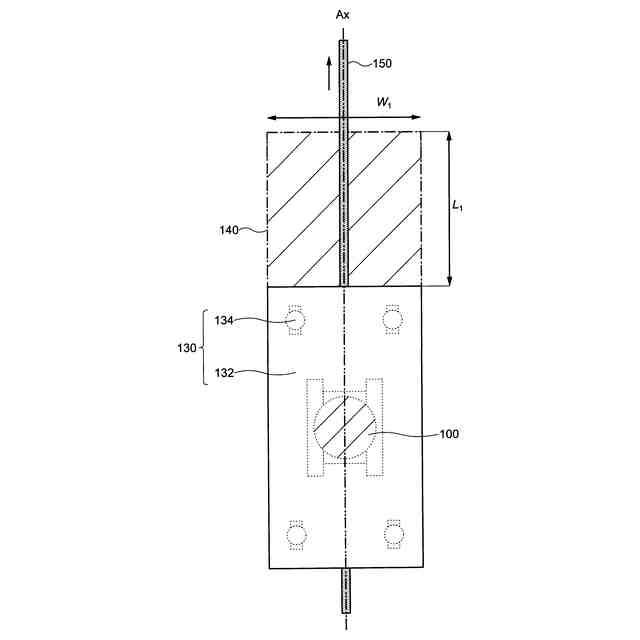
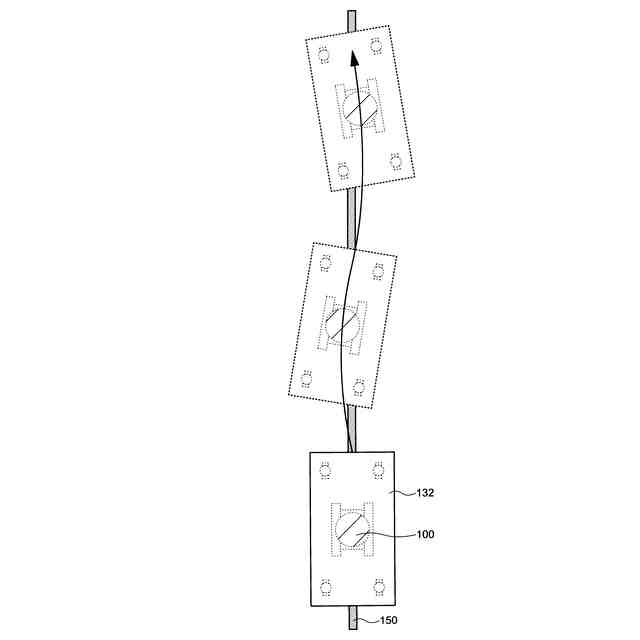
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
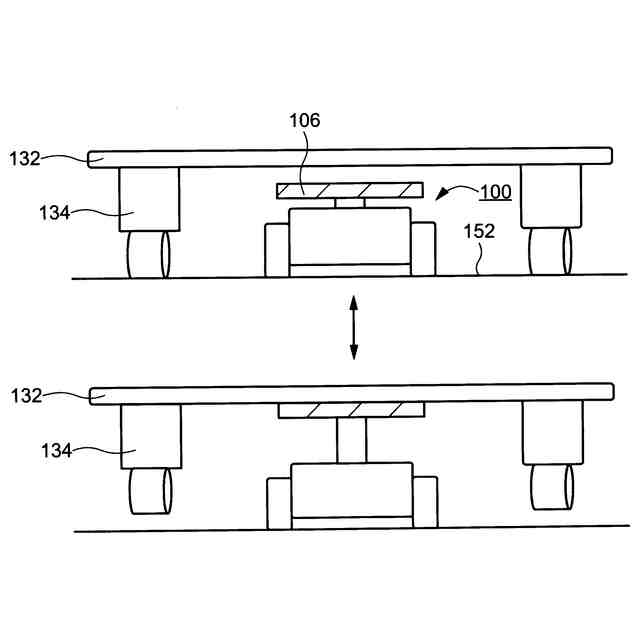
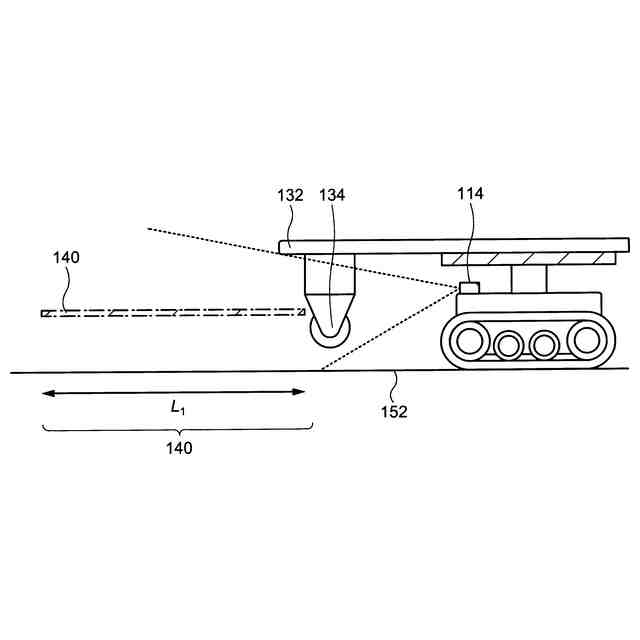
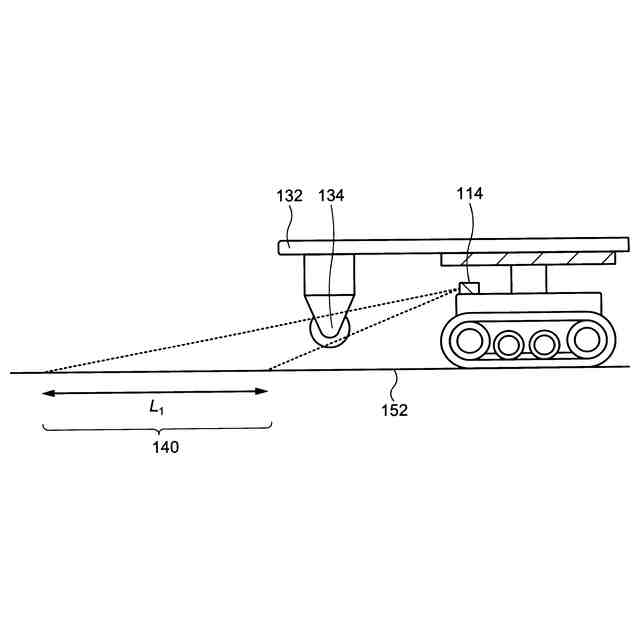
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的側面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的側面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的側面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的側面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る、自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
本発明の実施形態の一つに係る自動搬送ロボットを用いる搬送対象物の搬送方法を説明する模式的上面図。
【発明を実施するための形態】
【0008】
以下、本発明の各実施形態について、図面等を参照しつつ説明する。ただし、本発明は、その要旨を逸脱しない範囲において様々な態様で実施することができ、以下に例示する実施形態の記載内容に限定して解釈されるものではない。
【0009】
図面は、説明をより明確にするため、実際の態様に比べ、各部の幅、厚さ、形状などについて模式的に表される場合があるが、あくまで一例であって、本発明の解釈を限定するものではない。本明細書と各図において、既出の図に関して説明したものと同様の機能を備えた要素には、同一の符号を付して、重複する説明を省略することがある。
【0010】
以下、右折とは、自動搬送ロボット100が走行した状態または停止した状態で右に曲がることを言う。右に曲がる角度は90°に限られず、任意に選択される。左折についても同様である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
自己位置推定装置
5日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社やまびこ
走行制御装置
26日前
トヨタ自動車株式会社
移動体、及び制御方法
3日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社タブチ
減圧弁
20日前
WHILL株式会社
電動モビリティ
4日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
3日前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
10日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
24日前
井関農機株式会社
作業車両
1か月前
株式会社アイシン
自律移動体
10日前
株式会社アイシン
自律移動体
10日前
株式会社アイシン
自律移動体
10日前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
10日前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
20日前
ファナック株式会社
機械プログラミング方法
16日前
三菱電機株式会社
状態推定装置及び移動体制御装置
6日前
株式会社ダイヘン
情報処理装置
3日前
株式会社マキタ
作業ロボット
26日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ