TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025074630
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185582
出願日
2023-10-30
発明の名称
電動モビリティ
出願人
WHILL株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250507BHJP(制御;調整)
要約
【課題】より多くの人の移動を快適にすることができる電動モビリティが望まれている。
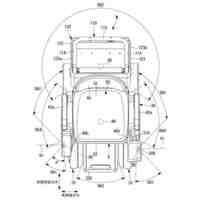
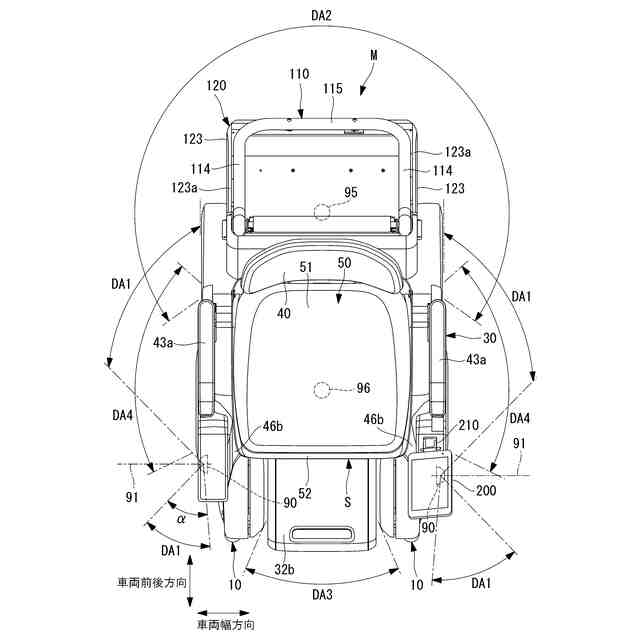
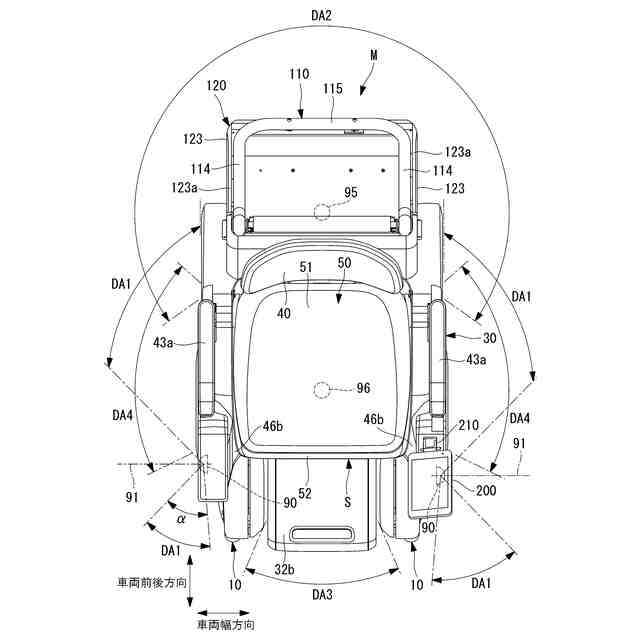
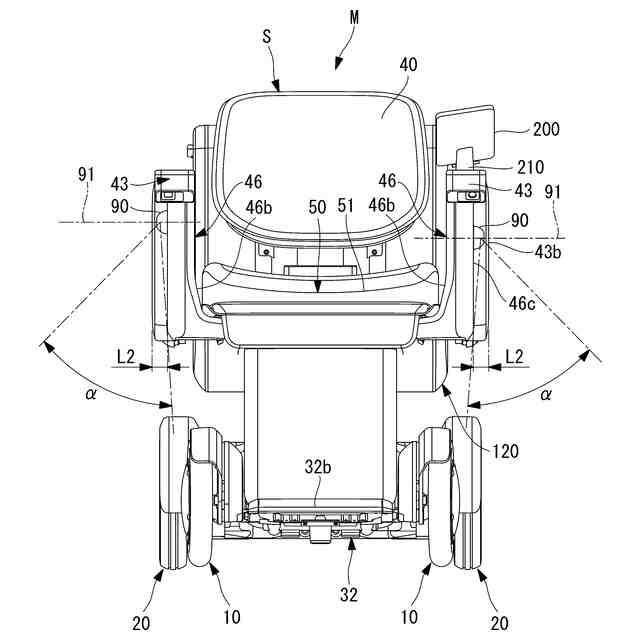
【解決手段】モビリティ本体30と、モビリティ本体30に取付けられ、所定方向に視野角αを有すると共に視野角αを所定の軸線91周りに回転させた検出範囲DA1を有し障害物を検出可能なセンサ90と、を備え、所定の軸線91が車両幅方向に延びるようにセンサ90がモビリティ本体30に取付けられている、電動モビリティ。
【選択図】図3
特許請求の範囲
【請求項1】
モビリティ本体と、
前記モビリティ本体に取付けられ、所定方向に視野角を有すると共に前記視野角を所定の軸線周りに回転させた検出範囲を有し障害物を検出可能なセンサと、を備え、
前記所定の軸線が車両幅方向に延びるように、前記センサが前記モビリティ本体に取付けられている、電動モビリティ。
続きを表示(約 1,600 文字)
【請求項2】
前記モビリティ本体はユーザが着座する座席ユニットを有し、
前記センサは、前記座席ユニットのアームレスト、前記アームレストが取付けられたアーム、前記アームレストの下方の部材、前記アームの下方の部材、又は、ガード部材に、前記車両幅方向の外側に突出するように取付けられ、
前記ガード部材は、前記ユーザの衣服、前記ユーザの大腿部、又は、前記ユーザの膝の前記座席ユニットからの前記車両幅方向のはみだしを低減するために前記座席ユニットに設けられた部材である、請求項1に記載の電動モビリティ。
【請求項3】
前記モビリティ本体に取付けられ、前記モビリティ本体の後方の段差を検出可能な後方段差センサを備える、請求項1又は2に記載の電動モビリティ。
【請求項4】
前記モビリティ本体を自動運転で動かす制御装置を備え、
前記制御装置は、前記モビリティ本体がエレベータのカゴに入る前に、車両後方が前記カゴ側に配置されるように前記モビリティ本体の方向変更を行う、請求項1に記載の電動モビリティ。
【請求項5】
前記モビリティ本体に設けられ、前記モビリティ本体の前輪の間および前記モビリティ本体の前記前輪と後輪の間の少なくとも一方から前記障害物を検出可能な下側センサと、
前記下側センサを、前記障害物を検出可能なセンシング位置と、前記センシング位置よりも上側である収納位置とに移動可能なセンサ移動機構と、を備える請求項1又は2に記載の電動モビリティ。
【請求項6】
前記モビリティ本体は、取外し可能に装着されるバッテリを有し、
前記センサ移動機構は、前記バッテリが前記モビリティ本体に装着された状態で前記下側センサを前記センシング位置に配置し、前記バッテリが前記モビリティ本体から取外された状態で前記下側センサを前記収納位置に配置するように構成されている、請求項5に記載の電動モビリティ。
【請求項7】
前記モビリティ本体に設けられ、前記モビリティ本体の前輪の間および前記モビリティ本体の前輪と後輪の間の少なくとも一方から前記障害物を検出可能な下側センサと、
前記モビリティ本体の下面から下方に突出しているセンサ保護部材と、を備え、
前記センサ保護部材は、前記下側センサのセンシングエリアのうち前記前輪又は前記後輪が入るエリアに配置されている、請求項1又は2に記載の電動モビリティ。
【請求項8】
前記モビリティ本体はユーザが着座する座席ユニットを有し、
前記モビリティ本体には、前記座席ユニットと前記ユーザとの前後方向の距離を検出可能なユーザ距離センサが取付けられている、請求項1に記載の電動モビリティ。
【請求項9】
前記モビリティ本体はユーザが着座する座席ユニットを有し、
前記座席ユニットは、座面部と、前記座席ユニットに着座している前記ユーザの大腿部および膝の少なくとも一方に対し前記車両幅方向の外側に配置され、前記ユーザの衣服、前記大腿部、若しくは、前記膝の前記座席ユニットからのはみだしを低減するためのガード部材と、を有し、
前記ガード部材の一部は前記座面部の前端よりも車両前方に配置され、前記ガード部材は下方に向かって前記車両幅方向の内側に傾斜している傾斜部を有する、請求項1に記載の電動モビリティ。
【請求項10】
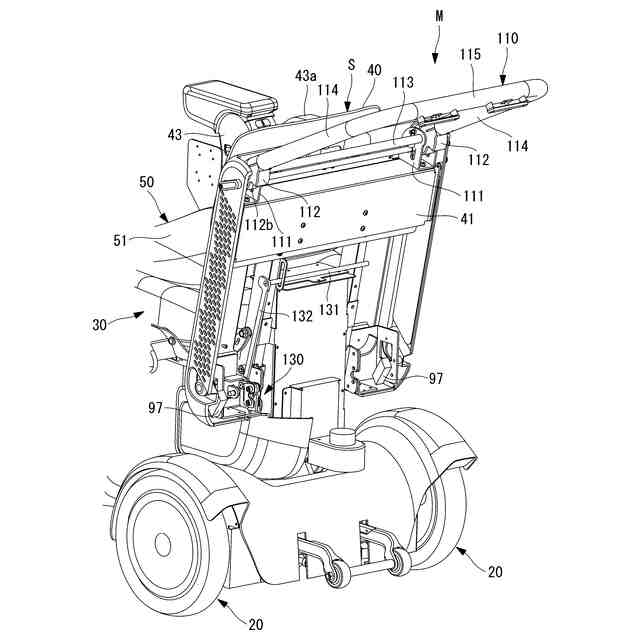
前記モビリティ本体に揺動可能に取付けられたプッシュハンドルを備え、
前記プッシュハンドルは、そのグリップ部を電動モビリティを押すための高さ位置に配置するための第1の揺動位置に揺動可能であると共に、前記グリップ部を前記第1の揺動位置よりも低い収納位置である第2の揺動位置に揺動可能である、請求項1又は2に記載の電動モビリティ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は電動モビリティに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
施設内において用いられる電動モビリティとして、電動モビリティの制御装置が、電動モビリティに設けられたセンサを用いて障害物を検出し、検出結果を用いて電動モビリティに障害物の回避、停止、自動運転等を行わせるものが知られている。例えば特許文献1を参照されたい。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/085446号
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような電動モビリティは様々な身体的特徴、人種、服装等のユーザに利用される。例えばユーザの身体的特徴として身長、体重等があり、ユーザの背骨が曲がっている場合もある。ユーザの身体、衣服等によってセンサの検出範囲が遮られることは、前記の障害物の回避、停止、自動運転等の精度に影響を与えると共に、ユーザの快適な利用に影響を与える。
【0005】
また、センサによる前記の障害物の検出の精度向上は電動モビリティの安全な走行に有用である。また、電動モビリティのコスト低減は、多くの施設でこのような電動モビリティの利用を実現するために有用である。これらもユーザによる電動モビリティの快適な利用に関係がある。
【0006】
前記事情に鑑み、より多くの人の移動を快適にすることができる電動モビリティが望まれている。
【課題を解決するための手段】
【0007】
本発明の一態様は、電動モビリティであって、モビリティ本体と、前記モビリティ本体に取付けられ、所定方向に視野角を有すると共に前記視野角を所定の軸線周りに回転させた検出範囲を有し障害物を検出可能なセンサと、を備え、前記所定の軸線が車両幅方向に延びるように、前記センサが前記モビリティ本体に取付けられている。
【図面の簡単な説明】
【0008】
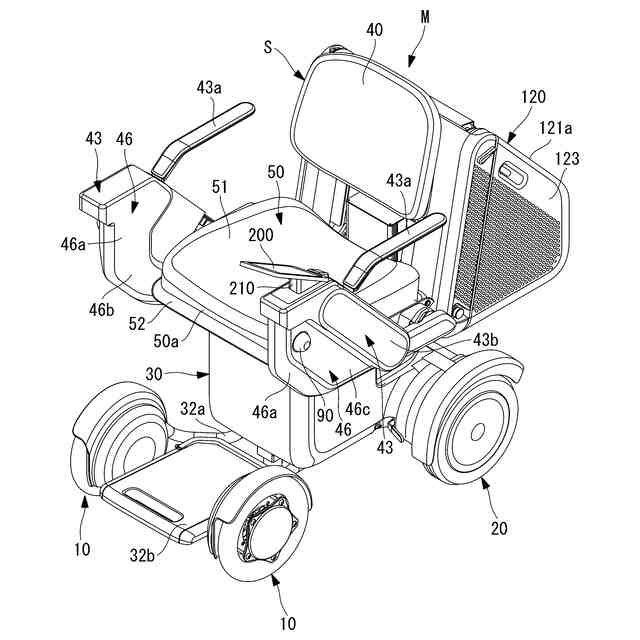
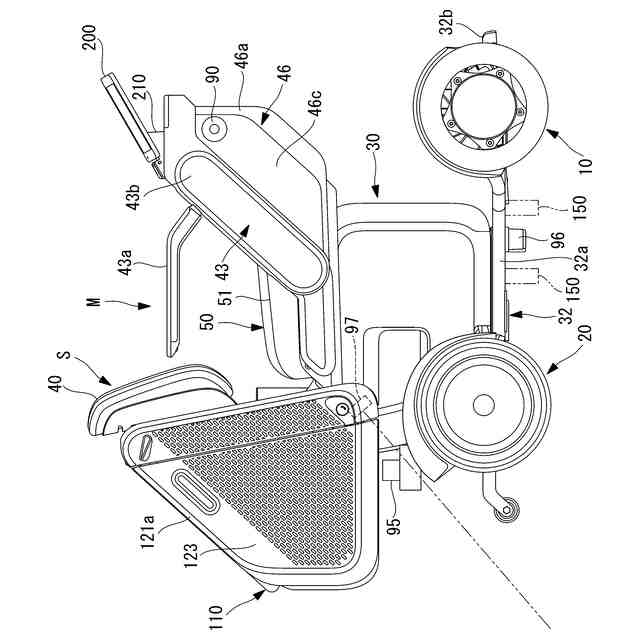
本発明の一実施形態に係る電動モビリティの前方斜視図である。
本実施形態の電動モビリティの側面図である。
本実施形態の電動モビリティの平面図である。
本実施形態の電動モビリティの正面図である。
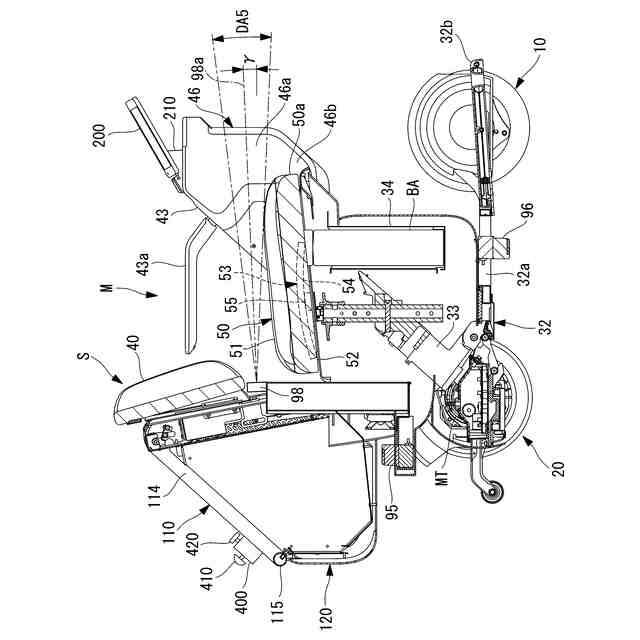
本実施形態の電動モビリティの縦断面図である。
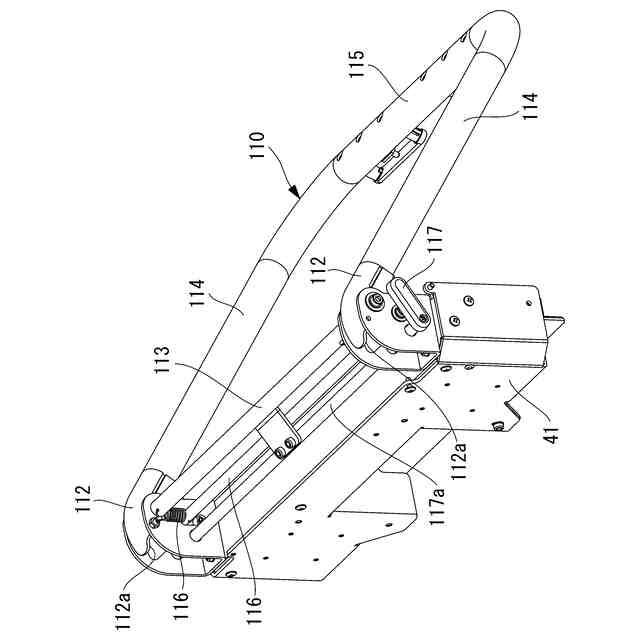
本実施形態の電動モビリティのプッシュハンドルの斜視図である。
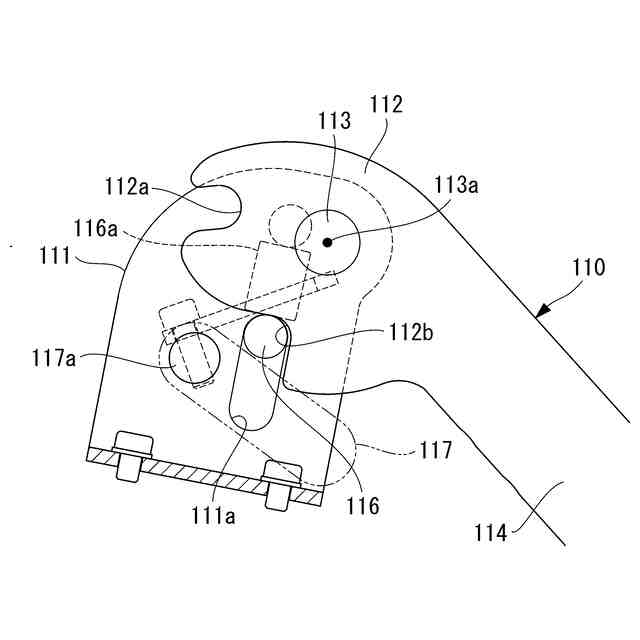
本実施形態の電動モビリティのプッシュハンドルの一部の縦断面図である。
本実施形態の電動モビリティの一部の後方斜視図である。
本実施形態の電動モビリティの荷物カゴの斜視図である。
本実施形態の電動モビリティの一部の縦断面図である。
本実施形態の電動モビリティの一部の縦断面図である。
本実施形態の電動モビリティの一部の縦断面図である。
本実施形態の電動モビリティの変形例の一部の縦断面図である。
本実施形態の電動モビリティの変形例の一部の縦断面図である。
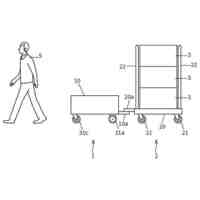
台車に載せられた本実施形態の電動モビリティの側面図である。
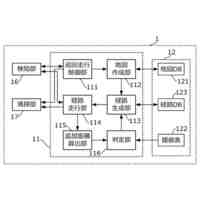
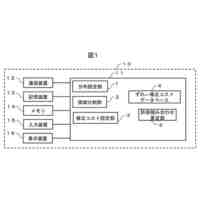
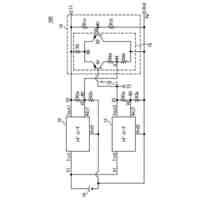
本実施形態の電動モビリティの制御装置のブロック図である。
本実施形態の電動モビリティが用いられる旅客ターミナルの概略図である。
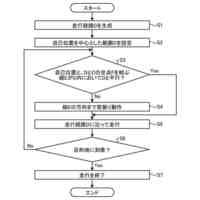
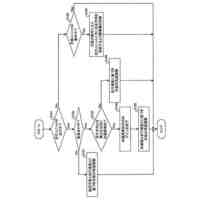
本実施形態の電動モビリティの旅客ターミナル内における動作例を示す図である。
本実施形態の電動モビリティの変形例の底面図である。
【発明を実施するための形態】
【0009】
本発明の一実施形態に係る空港等の施設におけるシステムと、電動モビリティMが、図面を参照しながら以下に説明される。
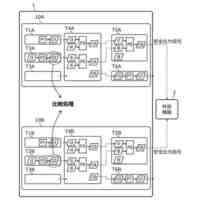
当該システムは、図17に示されるように、空港の旅客ターミナルT内に配置された複数台の電動モビリティMと、複数の電動モビリティMを管理する管理サーバであるサーバ100と、を備えている。サーバ100は空港内に配置されていなくてもよい。
【0010】
先ず、本実施形態の一人が着座して乗る電動モビリティMについて簡単に説明する。なお、当該システムにおいて、本実施形態の電動モビリティMとは異なる電動モビリティを用いることも可能である。
この電動モビリティMは、図1~図5に示されるように、一対の前輪(車輪)10と、一対の後輪(車輪)20と、前輪10および後輪20によって支持されたモビリティ本体30とを備える。モビリティ本体30は座席ユニットSを備える。前輪10および後輪20の他の車輪が設けられてもよく、前輪10および後輪20の数が前記以外であってもよい。また、前輪10および後輪20の一方が無い場合もあり得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
WHILL株式会社
電動モビリティ
1か月前
株式会社FUJI
工作機械
11日前
株式会社ダイヘン
移動体
16日前
ローム株式会社
半導体集積回路
26日前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
11日前
三栄ハイテックス株式会社
基準電圧回路
29日前
株式会社オプトン
制御プログラム生成装置
9日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社鷺宮製作所
制御装置
10日前
株式会社ダイヘン
負荷時タップ切換器
16日前
株式会社ダイフク
物品搬送設備
25日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイフク
物品搬送設備
9日前
株式会社ダイフク
物品搬送設備
2日前
株式会社ダイフク
物品搬送設備
9日前
株式会社戸張空調
アクセル・ブレーキ操作装置
22日前
株式会社タブチ
減圧弁
2か月前
オムロン株式会社
安全装置
9日前
WHILL株式会社
電動モビリティ
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
9日前
株式会社計数技研
移動体、及びプログラム
1か月前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
1か月前
ローム株式会社
半導体装置
1か月前
株式会社日立製作所
製造工程管理システム
10日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社FUJI
工作機械
12日前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
株式会社アイシン
自律移動体
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
26日前
FCLコンポーネント株式会社
電源回路および検出装置
2か月前
株式会社アイシン
自律移動体
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ