TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025042276
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023149185
出願日
2023-09-14
発明の名称
作業機械及び遠隔制御装置
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/20 20060101AFI20250319BHJP(水工;基礎;土砂の移送)
要約
【課題】運搬車両との実際の位置関係に対する認識のずれを抑制し、ロスの少ない軌道でバケットを移動させつつ運搬車両に精度良く土砂を積み込む。
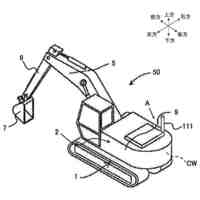
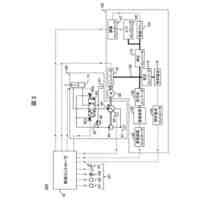
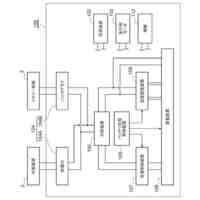
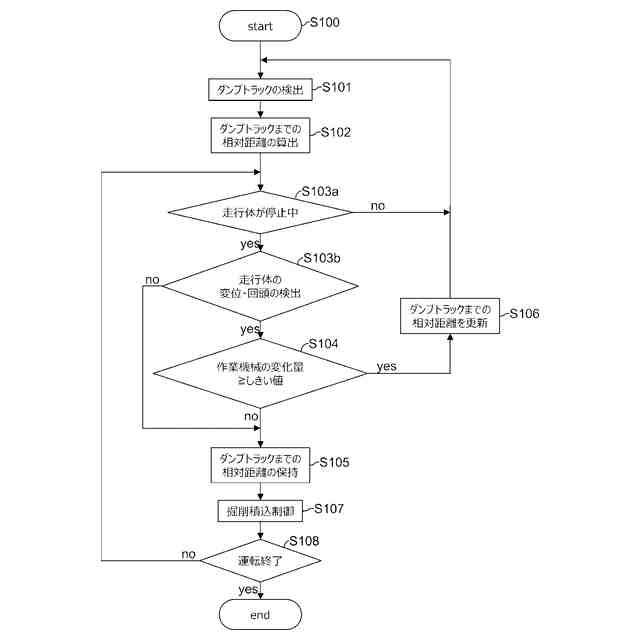
【解決手段】周囲の物体を検出する物体検出装置と、走行体の動作を検出する走行センサと、前記走行体の変位を検出する変位センサと、前記走行体、旋回体、及びフロント作業機を駆動する駆動装置と、前記物体検出装置、前記走行センサ、及び前記変位センサの検出結果に基づいて前記駆動装置を制御する制御装置とを備え、前記制御装置は、前記物体検出装置の検出信号を基に、前記走行体、前記旋回体、および前記フロント作業機の制御の基準となる対象物の位置を演算し、前記対象物の位置に基づいて前記旋回体及び前記フロント作業機を制御し、前記走行センサ及び前記変位センサの検出信号を基に、前記走行体の動作が停止している間に前記走行体が変位した場合、前記対象物の位置を再演算する作業機械を提供する。
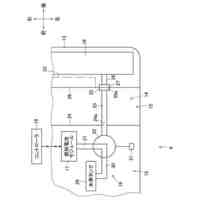
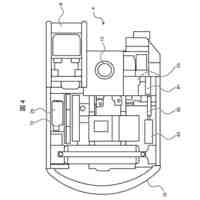
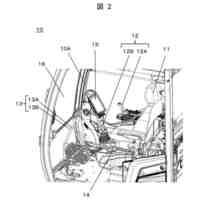
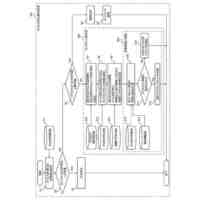
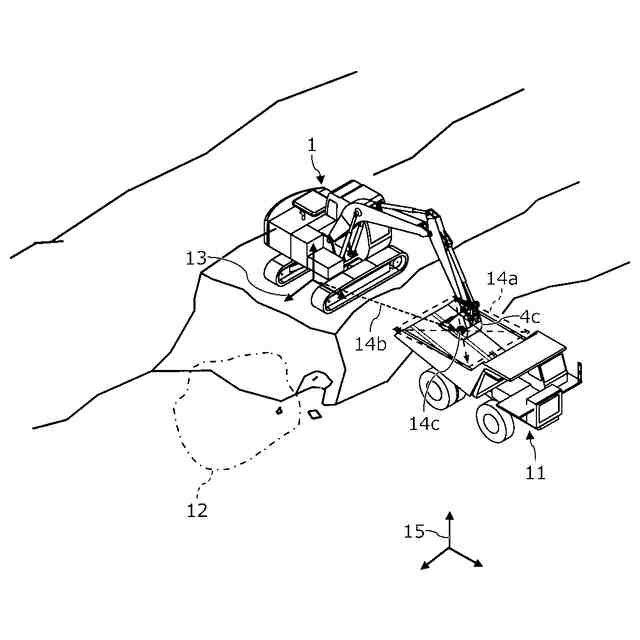
【選択図】図2
特許請求の範囲
【請求項1】
走行体と、前記走行体の上部に旋回可能に設けられた旋回体と、前記旋回体に取り付けられたフロント作業機とを備えた作業機械において、
前記作業機械の周囲の物体を検出する物体検出装置と、
前記走行体の動作を検出する走行センサと、
前記走行体の変位を検出する変位センサと、
前記走行体、前記旋回体、及び前記フロント作業機を駆動する駆動装置と、
前記物体検出装置、前記走行センサ、及び前記変位センサの検出結果に基づいて前記駆動装置を制御する制御装置とを備え、
前記制御装置は、
前記物体検出装置の検出信号を基に、前記走行体、前記旋回体、および前記フロント作業機の制御の基準となる対象物の位置を演算し、
前記対象物の位置に基づいて前記旋回体及び前記フロント作業機を制御し、
前記走行センサ及び前記変位センサの検出信号を基に、前記走行体の動作が停止している間に前記走行体が変位した場合、前記対象物の位置を再演算する
ことを特徴とする作業機械。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の作業機械において、
前記変位センサは、前記旋回体の位置を取得する測位装置、及び前記物体検出装置の少なくとも一方であり、
前記制御装置は、前記測位装置及び前記物体検出装置の少なくとも一方の検出信号を基に前記走行体の変位量を演算する
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記変位センサは、前記フロント作業機の動作を検出する動作検知センサであり、
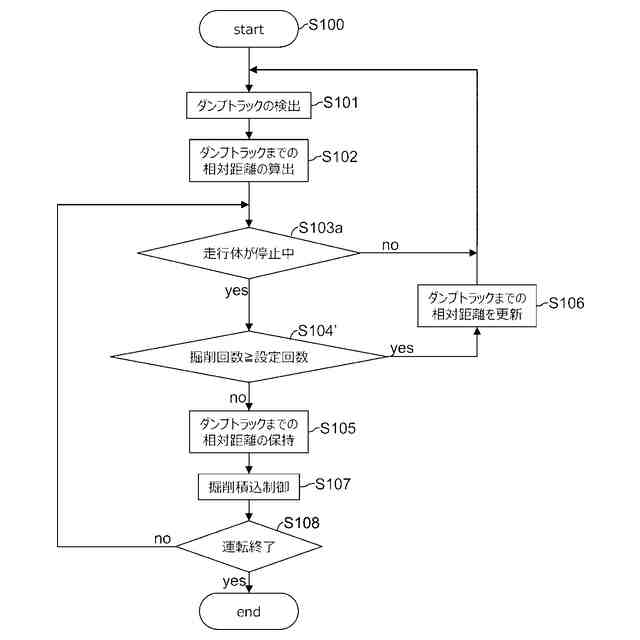
前記制御装置は、前記動作検知センサの検出信号を基に前記フロント作業機による掘削動作を検知し、前記走行体の停止継続中の前記掘削動作の回数が予め設定された設定回数に達したら、前記走行体の停止継続中に前記走行体がしきい値以上に変位したと判定する
ことを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
前記変位センサは、前記フロント作業機の動作を検出する動作検知センサであり、
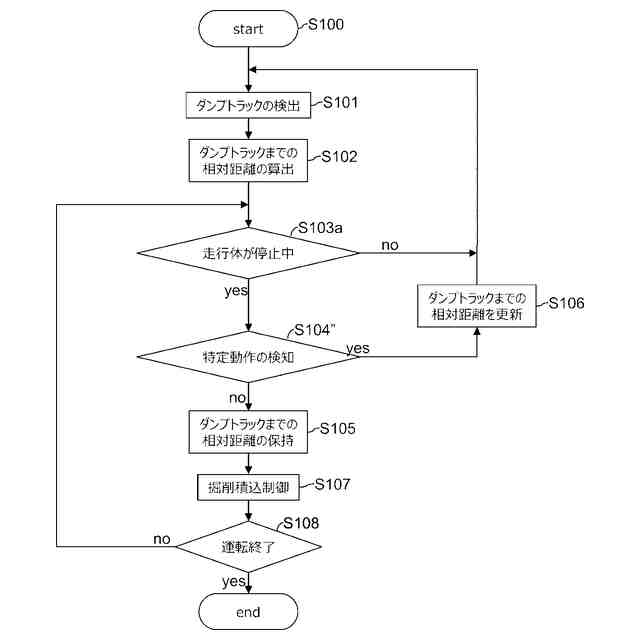
前記制御装置は、前記動作検知センサの検出信号を基に特定動作を検知し、前記特定動作が検知された場合に、前記走行体の停止継続中に前記走行体がしきい値以上に変位したと判定する
ことを特徴とする作業機械。
【請求項5】
請求項3に記載の作業機械において、
前記しきい値は、前記フロント作業機のバケットが前記対象物の領域を逸脱する値であることを特徴とする作業機械。
【請求項6】
走行体と、前記走行体の上部に旋回可能に設けられた旋回体と、前記旋回体に取り付けられたフロント作業機と、周囲の物体を検出する物体検出装置と、前記走行体の動作を検出する走行センサと、前記走行体の変位を検出する変位センサと、前記走行体、前記旋回体、及び前記フロント作業機を駆動する駆動装置とを備えた作業機械と通信し、前記物体検出装置、前記走行センサ、及び前記変位センサの検出結果に基づいて前記駆動装置を遠隔制御する遠隔制御装置において、
前記作業機械から受信した前記物体検出装置の検出信号を基に、前記走行体、前記旋回体、および前記フロント作業機の制御の基準となる対象物の位置を演算し、
前記対象物の位置に基づいて前記旋回体及び前記フロント作業機の制御信号を生成して前記作業機械に送信し、
前記作業機械から受信した前記走行センサ及び前記変位センサの検出信号を基に、前記走行体の動作が停止している間に前記走行体が変位した場合、前記対象物の位置を再演算する
ことを特徴とする遠隔制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の作業機械及び遠隔制御装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、油圧ショベルやブルドーザ等の作業機械において、オペレータの特定の操作に対して制御システムが作業機械の制御に介入する等、作業の自動化及び半自動化が進められている。
【0003】
油圧ショベルの自動制御の例として、目標位置に向けてバケットを移動させた後、移動先の領域をセンサで認識し、センサで認識した実際の目標位置に対してバケット位置がずれている場合にバケットの位置を補正する技術が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2022-77328号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
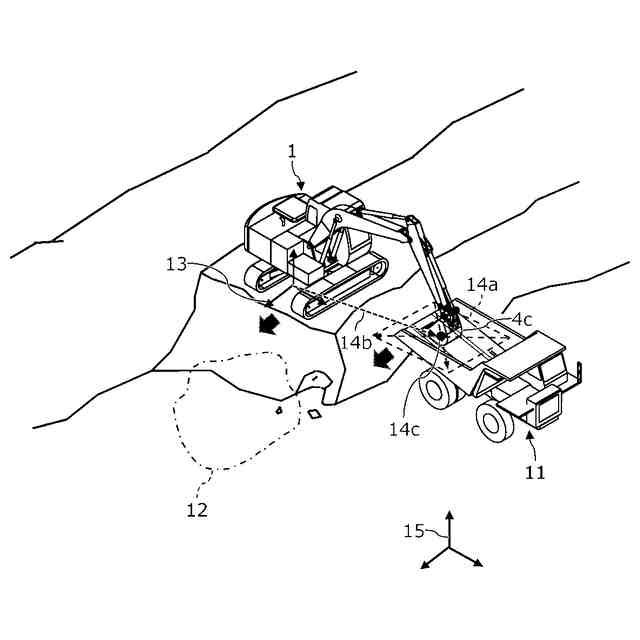
油圧ショベルは、掘削した土砂等を運搬車両であるダンプトラックに積込む積込機械として使用される場合がある。運搬車両への土砂の積み込みを自動化又は半自動化する場合、制御システムには油圧ショベルに対する運搬車両の相対位置の高い特定精度が要求される。しかし、油圧ショベルは、例えば地面を掘削する際の反作用により履帯が地面を滑り、車体が掘削位置に引き寄せられる場合がある。この場合、運搬車両に相対して油圧ショベルが移動するが、この移動はオペレータや制御システムの指示によるものではないため、制御システムが認識する油圧ショベルと運搬車両の相対位置に対して実際の相対位置がずれる。この状態で自動積込制御が実行されると、油圧ショベルによる土砂の積込位置がずれ、運搬車両から土砂がこぼれる等して生産性が低下する。
【0006】
それに対し、特許文献1に記載された技術の場合、目標位置に向けてバケットを移動させた後、センサで実際の目標位置を認識して必要に応じてバケット位置を補正する。そのため、油圧ショベルと運搬車両との相対位置がずれても、放土前にバケット位置が補正されて積込位置のずれが是正され得る。
【0007】
しかしながら、同文献の技術では、バケットを目標位置に向けて移動させた後でバケット位置を確認し補正するため、バケットが積込位置まで必ずしも最短軌道で移動しない。そのため、バケットの移動時間にロスが生じる場合があり、このような動作が繰り返されると生産性が低下する。
【0008】
本発明の目的は、運搬車両との実際の位置関係に対する認識のずれを抑制し、ロスの少ない軌道でバケットを移動させつつ運搬車両に精度良く土砂を積み込むことができる作業機械及び遠隔制御装置を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、走行体と、前記走行体の上部に旋回可能に設けられた旋回体と、前記旋回体に取り付けられたフロント作業機とを備えた作業機械において、前記作業機械の周囲の物体を検出する物体検出装置と、前記走行体の動作を検出する走行センサと、前記走行体の変位を検出する変位センサと、前記走行体、前記旋回体、及び前記フロント作業機を駆動する駆動装置と、前記物体検出装置、前記走行センサ、及び前記変位センサの検出結果に基づいて前記駆動装置を制御する制御装置とを備え、前記制御装置は、前記物体検出装置の検出信号を基に、前記走行体、前記旋回体、および前記フロント作業機の制御の基準となる対象物の位置を演算し、前記対象物の位置に基づいて前記旋回体及び前記フロント作業機を制御し、前記走行センサ及び前記変位センサの検出信号を基に、前記走行体の動作が停止している間に前記走行体が変位した場合、前記対象物の位置を再演算する作業機械を提供する。
【発明の効果】
【0010】
本発明によれば、運搬車両との実際の位置関係に対する認識のずれを抑制し、ロスの少ない軌道でバケットを移動させつつ運搬車両に精度良く土砂を積み込むことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
走行装置
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
運搬車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
28日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
ダンプトラック
1か月前
日立建機株式会社
潤滑油診断システム
1か月前
日立建機株式会社
コントロールバルブ
1か月前
日立建機株式会社
建設機械の旋回装置
1か月前
日立建機株式会社
作業機械の制御装置
1か月前
日立建機株式会社
コントローラの筐体
6日前
日立建機株式会社
電動式ダンプトラック
1か月前
日立建機株式会社
ダンプトラックの走行装置
1か月前
日立建機株式会社
作業機械のドリンクホルダ
1か月前
日立建機株式会社
運搬車両及び管制システム
29日前
日立建機株式会社
車両および車両管理システム
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ