TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059504
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169629
出願日
2023-09-29
発明の名称
モータの制御装置及びパーキングロック装置
出願人
株式会社ミクニ
代理人
SSIP弁理士法人
主分類
H02P
6/24 20060101AFI20250403BHJP(電力の発電,変換,配電)
要約
【課題】ロータの角度位置の目標角度位置への迅速な到達と、ロータの停止位置の高精度化とを両立し得るモータの制御装置およびパーキングロック装置を提供する。
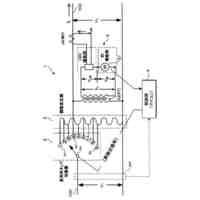
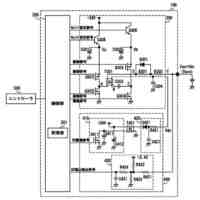
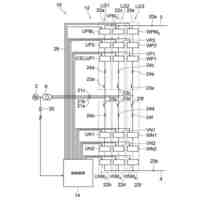
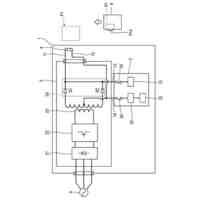
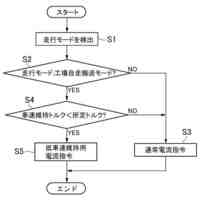
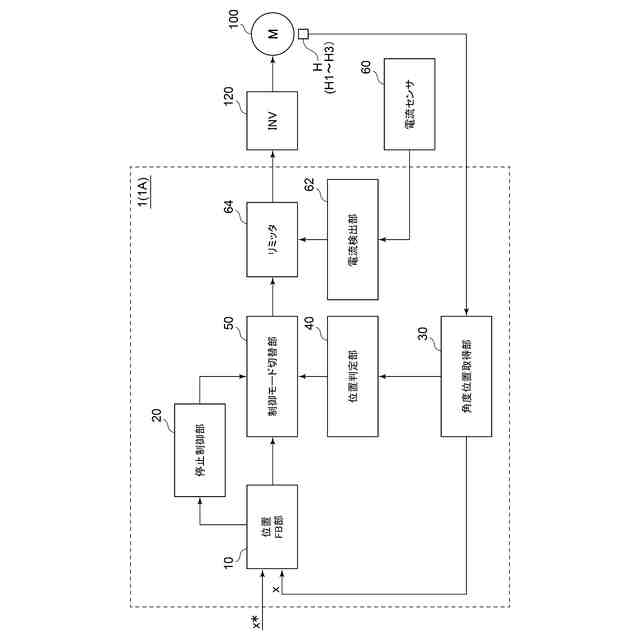
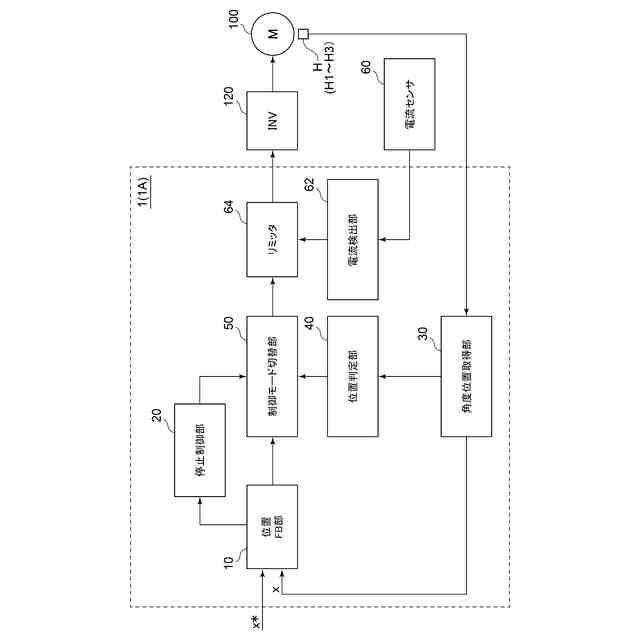
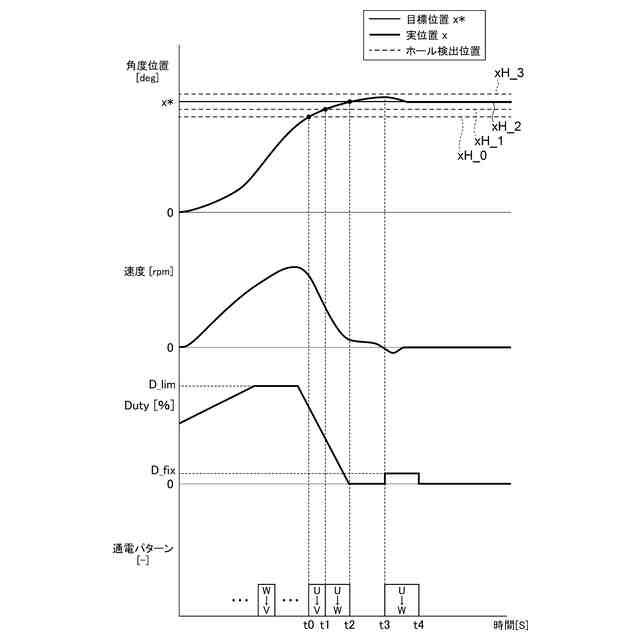
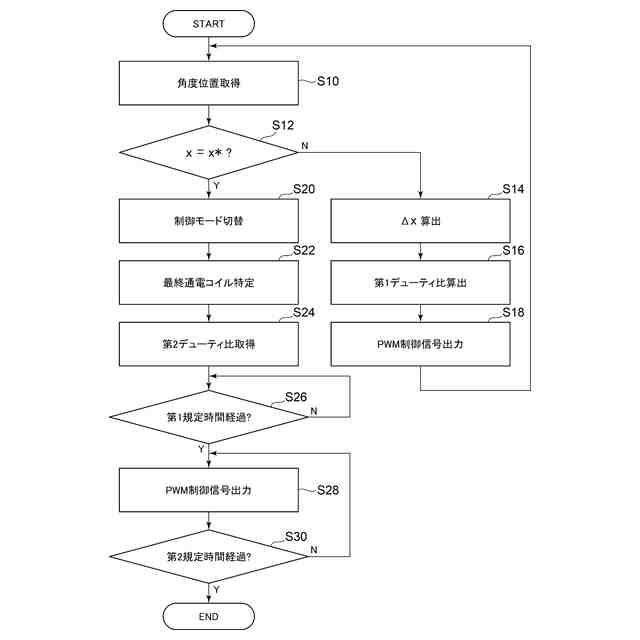
【解決手段】モータ100の制御装置1は、ホール素子Hの検出信号から得られるロータ104の角度位置xがロータ104の目標角度位置x*に到達したか否かを判定する位置判定部40と、角度位置xと目標角度位置x*との偏差Δxに基づくフィードバック制御により決定した出力により、3相コイル101のうち角度位置xに対応する一対の相のコイルに対して通電制御を行うフィードバック制御モードと、3相コイル101のうちフィードバック制御モードにおいて最後に通電した最終通電コイルに対して通電制御を行う停止制御モードとの間で制御モードを切り替える制御モード切替部50と、を備える。制御モード切替部50は、位置判定部40により角度位置xが目標角度位置x*に到達したと判定されたとき、フィードバック制御モードから停止制御モードへと制御モードを切り替える。
【選択図】図4
特許請求の範囲
【請求項1】
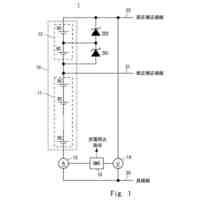
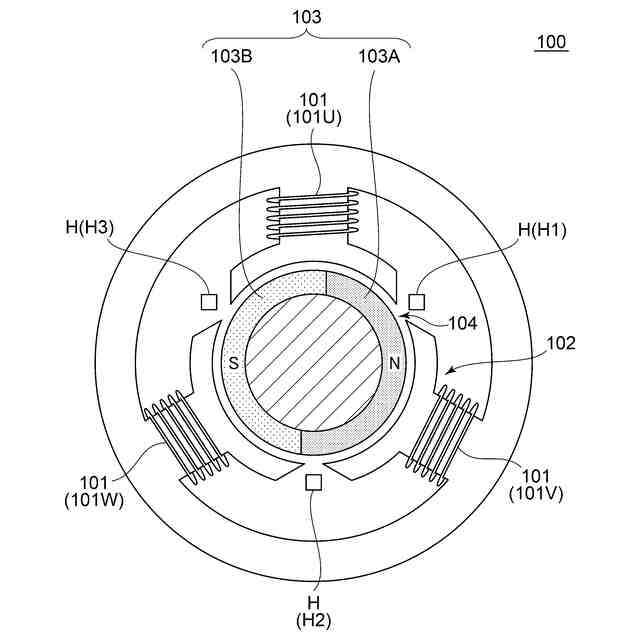
3相コイルを含むステータ、前記ステータに対向して配置される磁石を含むロータ、および、前記ロータの角度位置を示す検出信号を生成するためのホール素子を備えるモータの制御装置であって、
前記ホール素子の前記検出信号から得られる前記ロータの前記角度位置が前記ロータの目標角度位置に到達したか否かを判定するための位置判定部と、
前記ホール素子の前記検出信号から得られる前記ロータの前記角度位置と前記目標角度位置との偏差に基づくフィードバック制御により決定した出力により、前記3相コイルのうち前記角度位置に対応する一対の相のコイルに対して通電制御を行うフィードバック制御モードと、前記3相コイルのうち前記フィードバック制御モードにおいて最後に通電した最終通電コイルに対して通電制御を行う停止制御モードとの間で制御モードを切り替えるように構成された制御モード切替部と、
を備え、
前記制御モード切替部は、前記位置判定部により前記角度位置が前記目標角度位置に到達したと判定されたとき、前記フィードバック制御モードから前記停止制御モードへと前記制御モードを切り替えるように構成された
モータの制御装置。
続きを表示(約 830 文字)
【請求項2】
前記停止制御モードでは、前記ホール素子の前記検出信号から得られる前記ロータの前記角度位置が前記目標角度位置に到達した時点から第1規定時間経過後に前記最終通電コイルに対する前記通電制御を開始するように構成された
請求項1に記載のモータの制御装置。
【請求項3】
前記停止制御モードでは、前記最終通電コイルに対する前記通電制御を第2規定時間継続するように構成された
請求項1又は2に記載のモータの制御装置。
【請求項4】
前記フィードバック制御モードでは、前記フィードバック制御により決定した第1デューティ比に基づくPWM制御により前記一対の相のコイルに対して前記通電制御を行い、
前記停止制御モードでは、固定値である第2デューティ比に基づくPWM制御により前記最終通電コイルに対する前記通電制御を行う
ように構成された請求項1又は2に記載のモータの制御装置。
【請求項5】
前記制御モード切替部は、前記停止制御モードを実行した後、前記目標角度位置に対応して予め設定された通電パターンにて前記3相コイルに対して通電を行う高精度停止制御モードに前記制御モードを切り替えるように構成された
請求項1又は2に記載のモータの制御装置。
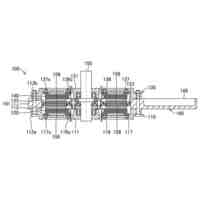
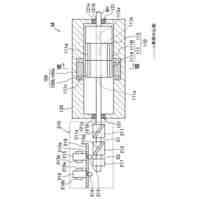
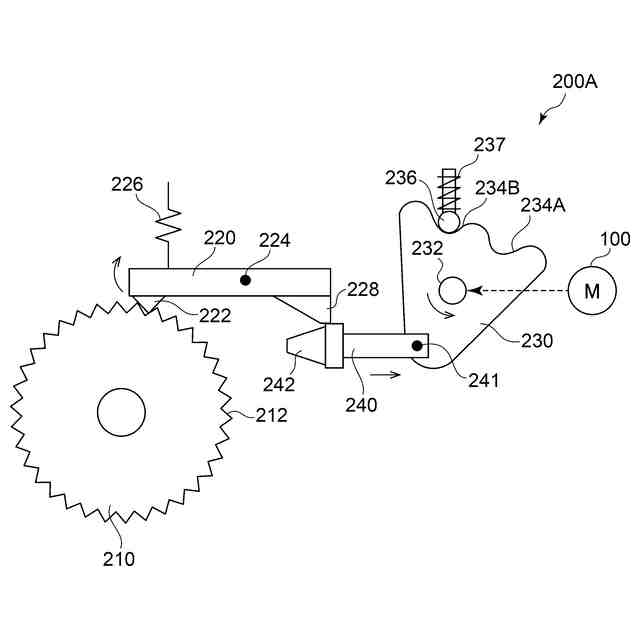
【請求項6】
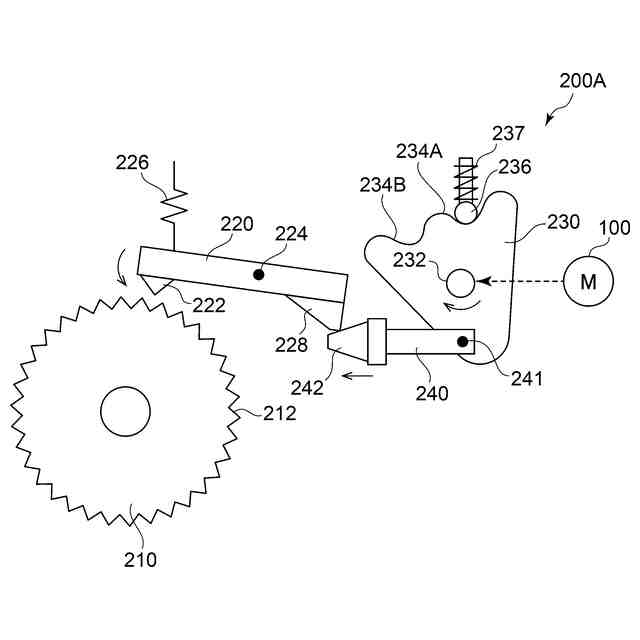
パーキングロックギアと、
3相コイルを含むステータ、前記ステータに対向して配置される磁石を含むロータ、および、前記ロータの角度位置を示す検出信号を生成するためのホール素子を備えるモータと、
前記モータを制御するための請求項1又は2に記載の制御装置と、
前記モータによって、前記パーキングロックギアに係合するロック位置と、前記パーキングロックギアから離脱したロック解除位置との間で移動可能に駆動されるように構成されたパーキングロックポールと、
を備えるパーキングロック装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータの制御装置及びパーキングロック装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、ホール素子の検出信号に基づいて3相モータを制御する3相モータの制御装置が知られている。
【0003】
例えば、特許文献1には、3相直流モータの回転速度および回転停止までの残りパルス数に基づいて回転停止位置の調整を開始すべきと判定されたとき、ホールICの出力信号を予め用意したテーブルで変換して得られた信号に基づいて3相直流モータの制御を行う装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-43912号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、モータの使用目的によっては、ホール素子の検出信号から得られるロータの角度位置と目標角度位置との偏差(位置偏差)に基づいて決定した出力でモータを制御する位置フィードバック制御が望まれる。
例えば、パーキングロック装置は、車軸を固定するロック位置と、車軸の固定が解除されたロック解除位置との間でパーキングロックポールを迅速に動かす必要があるため、位置フィードバック制御によるモータ(パーキングロックアクチュエータ)の制御が望ましい。
【0006】
しかし、位置フィードバック制御でロータを目標角度位置に停止させる場合、ロータの角度位置が目標角度位置に到達して位置偏差がゼロとなっても、モータの出力軸に外力が作用すると、ロータの角度位置が目標角度位置を通り過ぎてしまう。例えば、モータの出力軸に減速機が連結される場合、イナーシャにより回転を続けようとする減速機のギアからモータの出力軸を介してロータに外力が作用し得る。
この場合、ロータがさらに回転して新たな角度位置を示すホール素子の検出信号を受領しない限り、フィードバック制御モードによるロータ停止位置の是正は期待できず、ロータの停止位置の精度が低下してしまう。
【0007】
なお、特許文献1記載の制御装置は、通常モードにおいて、マイコンから指定された速度に対応するPWM信号(制動開始前)、または、制動用の固定PWM信号(制動開始後)をモータドライバに出力するようになっており、フィードバック位置制御を行うものではない。
【0008】
上述の事情に鑑みて、本発明の少なくとも幾つかの実施形態は、ロータの角度位置の目標角度位置への迅速な到達と、ロータの停止位置の高精度化とを両立し得るモータの制御装置およびパーキングロック装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の少なくとも幾つかの実施形態に係るモータの制御装置は、
3相コイルを含むステータ、ステータに対向して配置される磁石を含むロータ、および、ロータの角度位置を示す検出信号を生成するためのホール素子を備えるモータの制御装置であって、
ホール素子の検出信号から得られるロータの角度位置がロータの目標角度位置に到達したか否かを判定するための位置判定部と、
ホール素子の検出信号から得られるロータの角度位置と目標角度位置との偏差に基づくフィードバック制御により決定した出力により、3相コイルのうち角度位置に対応する一対の相のコイルに対して通電制御を行うフィードバック制御モードと、3相コイルのうちフィードバック制御モードにおいて最後に通電した最終通電コイルに対して通電制御を行う停止制御モードとの間で制御モードを切り替えるように構成された制御モード切替部と、
を備え、
制御モード切替部は、位置判定部により角度位置が目標角度位置に到達したと判定されたとき、フィードバック制御モードから停止制御モードへと制御モードを切り替えるように構成される。
【発明の効果】
【0010】
本発明の少なくとも幾つかの実施形態では、制御モード切替部の動作により、ロータの目標角度位置への到達時にフィードバック制御モードから停止制御モードに移行し、フィードバック制御モードにて最後に通電したコイル(最終通電コイル)に対して通電制御が行われる。このため、仮にロータが目標角度位置を通り越してしまっても、ロータの新たな角度位置を示す次のホール素子の検出信号の受領の有無にかかわらず、ロータを目標角度位置に戻すのに適したトルクをロータに付与することで、ロータの停止位置の高精度化を実現できる。
よって、フィードバック制御モード及び停止制御モードにより、ロータの角度位置の目標角度位置への迅速な到達と、ロータの停止位置の高精度化とを両立可能である。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電機
12日前
個人
発電機
8日前
ニデック株式会社
モータ
4日前
株式会社アイシン
車両用駆動装置
20日前
富士電機株式会社
半導体装置
12日前
株式会社シマノ
電力供給装置
13日前
株式会社浅羽製作所
通線用先端誘導具
19日前
トヨタ自動車株式会社
蓄電池制御装置
14日前
株式会社ダイヘン
電力システム
14日前
株式会社ダイヘン
電圧調整装置
4日前
トヨタ紡織株式会社
磁石挿入装置
4日前
株式会社ゲットクリーンエナジー
発電機
5日前
株式会社ダイヘン
蓄電池システム
19日前
日本航空電子工業株式会社
シール構造体
22日前
GX株式会社
可搬式太陽光発電用電源装置
12日前
株式会社ダイヘン
無線給電システム
4日前
矢崎総業株式会社
グロメット
22日前
トヨタ自動車株式会社
充電制御装置
12日前
キヤノン株式会社
電源装置、画像形成装置
13日前
トヨタバッテリー株式会社
二次電池システム
4日前
株式会社豊田自動織機
回転電機
4日前
株式会社豊田自動織機
回転電機
4日前
株式会社キャップ
アキシャルギャップモータ
8日前
株式会社TMEIC
電力変換装置
12日前
マツダ株式会社
モータ
14日前
株式会社オリジン
充電器
22日前
マツダ株式会社
モータ
14日前
個人
同期回転電機
19日前
本田技研工業株式会社
回転電機
22日前
株式会社デンソー
電力変換装置
5日前
シンフォニアテクノロジー株式会社
充電装置
13日前
トヨタ自動車株式会社
モータの制御装置
12日前
株式会社 神崎高級工機製作所
回転電機
19日前
株式会社ゲットクリーンエナジー
コマ式発電機
20日前
矢崎総業株式会社
電気接続箱
13日前
株式会社日立産機システム
回転電機
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ