TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071457
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181634
出願日
2023-10-23
発明の名称
印刷方法およびロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B05D
1/26 20060101AFI20250428BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
【課題】高品質な印刷を行うことができる印刷方法およびロボットシステムを提供すること。
【解決手段】印刷ヘッドを備えるロボットを用い、対象物と前記印刷ヘッドとを相対的に移動させつつ前記印刷ヘッドからインクを吐出することにより前記対象物への印刷作業を行う印刷方法であって、前記ロボットは、前記対象物に接触させる接触部を有し、前記ロボットを用いて、前記接触部を前記対象物に接触させながら前記対象物に対して移動させ、前記移動時の前記ロボットの軌道から前記対象物の形状を検出し、前記対象物の形状に基づいて前記印刷作業を行う。
【選択図】図12
特許請求の範囲
【請求項1】
印刷ヘッドを備えるロボットを用い、対象物と前記印刷ヘッドとを相対的に移動させつつ前記印刷ヘッドからインクを吐出することにより前記対象物への印刷作業を行う印刷方法であって、
前記ロボットは、前記対象物に接触させる接触部を有し、
前記ロボットを用いて、前記接触部を前記対象物に接触させながら前記対象物に対して移動させ、
前記移動時の前記ロボットの軌道から前記対象物の形状を検出し、
前記対象物の前記形状に基づいて前記印刷作業を行うことを特徴とする印刷方法。
続きを表示(約 920 文字)
【請求項2】
前記印刷ヘッドは、前記インクを吐出するノズルを有し、
前記印刷作業では、前記ノズルと前記対象物との離間距離が閾値を超える場合は、前記ノズルから前記インクを吐出しない請求項1に記載の印刷方法。
【請求項3】
前記対象物は、三次元形状である請求項2に記載の印刷方法。
【請求項4】
前記ノズルは、前記移動の方向に交差する方向に並んで複数配置されている請求項2に記載の印刷方法。
【請求項5】
前記印刷ヘッドよりも前方において前記接触部を前記対象物に接触させて、前記対象物の形状を検出しながら前記印刷作業を行う請求項1に記載の印刷方法。
【請求項6】
ロボットアームと、前記ロボットアームの先端部にベースを介して配置されている印刷ヘッドおよび接触部と、を有するロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記制御装置は、前記ロボットアームを用いて、前記接触部を前記対象物に接触させながら前記対象物に対して移動させ、
前記移動時の前記ロボットアームの先端部の軌道から前記対象物の形状を検出し、
前記対象物の前記形状に基づいて前記対象物に対する印刷作業を行うことを特徴とするロボットシステム。
【請求項7】
前記印刷ヘッドは、前記インクを吐出するノズルを有し、
前記制御装置は、前記ノズルと前記対象物との離間距離が閾値を超える場合、前記ノズルから前記インクを吐出しない請求項6に記載のロボットシステム。
【請求項8】
前記ロボットは、前記ベースと前記ロボットアームとの間に配置されている力覚センサーを有する請求項6に記載のロボットシステム。
【請求項9】
前記接触部は、回転しながら前記対象物に対して移動する回転体である請求項6に記載のロボットシステム。
【請求項10】
前記印刷作業の際、前記接触部は、前記印刷ヘッドよりも移動方向の前方に位置している請求項6に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、印刷方法およびロボットシステムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1に記載された印刷システムは、先端に装着された印刷ヘッドを備えたロボットを印刷軌道に沿って動かしつつ対象物に向けて印刷ヘッドからインクを吐出することにより、対象物への印刷を行う。また、印刷システムは、印刷ヘッドの実際の位置を検出するための回転角度センサーと、印刷ヘッドとの間に配置され印刷ヘッドの実際の位置に基づいて印刷ヘッドの位置を補正するピエゾアクチュエーターと、を有する。そして、印刷ヘッドの実際の位置に基づいて印刷ヘッドの位置を補正することにより、ストリップ(隙間)のない印刷を実現している。
【先行技術文献】
【特許文献】
【0003】
特開2013-202781号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、対象物の形状を取得する方法として、対象物のCAD(Computer Aided Design)データを用いる方法がある。しかしながら、CADデータを用いる方法では、対象物の個体差や位置ずれに対応することができず、印刷品質の低下を招くおそれがある。
【課題を解決するための手段】
【0005】
本発明の印刷方法は、印刷ヘッドを備えるロボットを用い、対象物と前記印刷ヘッドとを相対的に移動させつつ前記印刷ヘッドからインクを吐出することにより前記対象物への印刷作業を行う印刷方法であって、
前記ロボットは、前記対象物に接触させる接触部を有し、
前記ロボットを用いて、前記接触部を前記対象物に接触させながら前記対象物に対して移動させ、
前記移動時の前記ロボットの軌道から前記対象物の形状を検出し、
前記対象物の形状に基づいて前記印刷作業を行う。
【0006】
本発明のロボットシステムは、ロボットアームと、前記ロボットアームの先端部にベースを介して配置されている印刷ヘッドおよび接触部と、を有するロボットと、
前記ロボットの駆動を制御する制御装置と、を有し、
前記制御装置は、前記ロボットアームを用いて、前記接触部を前記対象物に接触させながら前記対象物に対して移動させ、
前記移動時の前記ロボットアームの先端部の軌道から前記対象物の形状を検出し、
前記対象物の形状に基づいて前記対象物に対する印刷作業を行う。
【図面の簡単な説明】
【0007】
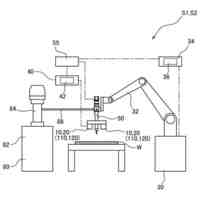
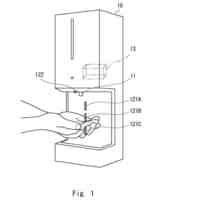
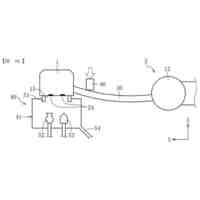
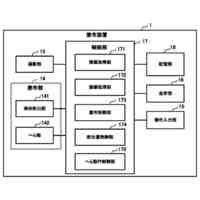
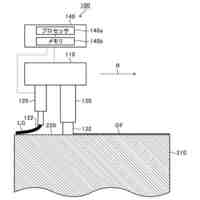
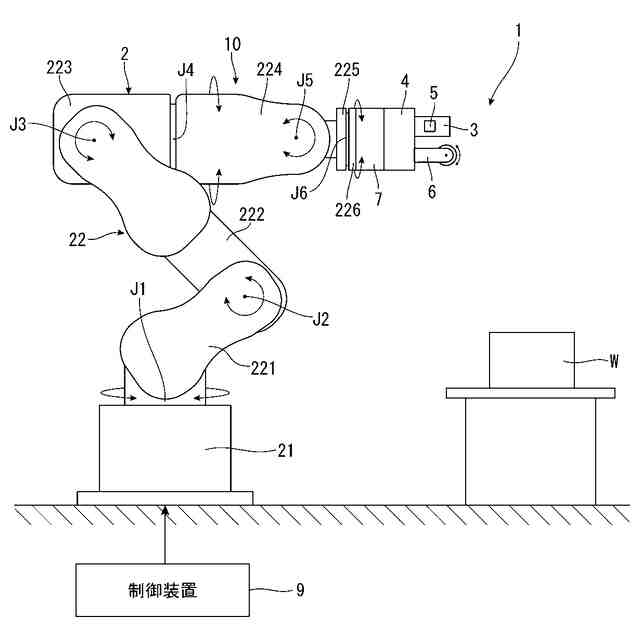
第1実施形態に係るロボットシステムの全体図である。
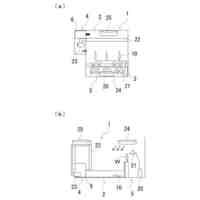
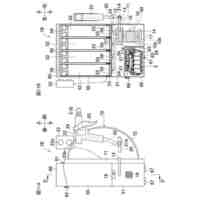
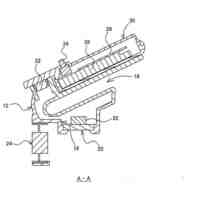
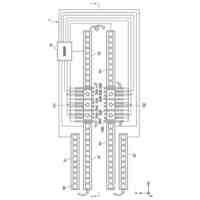
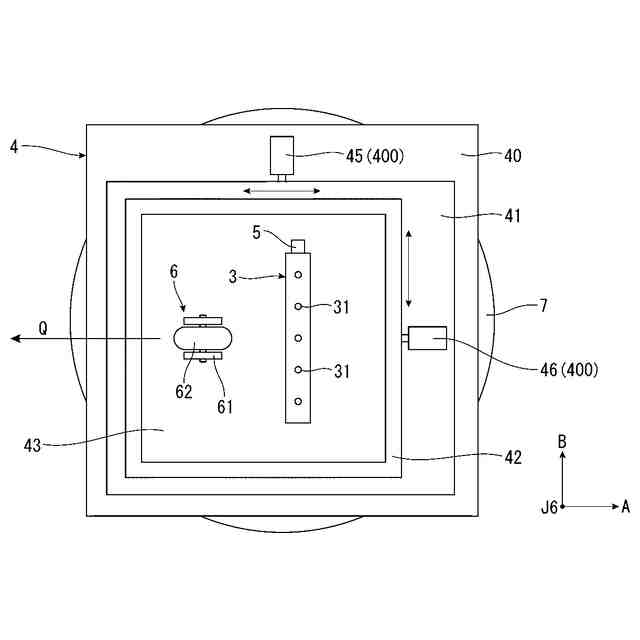
図1に示すロボットが備える移動ステージを示す平面図である。
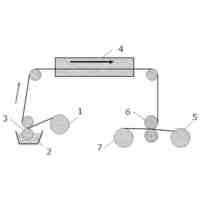
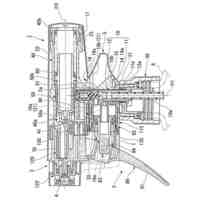
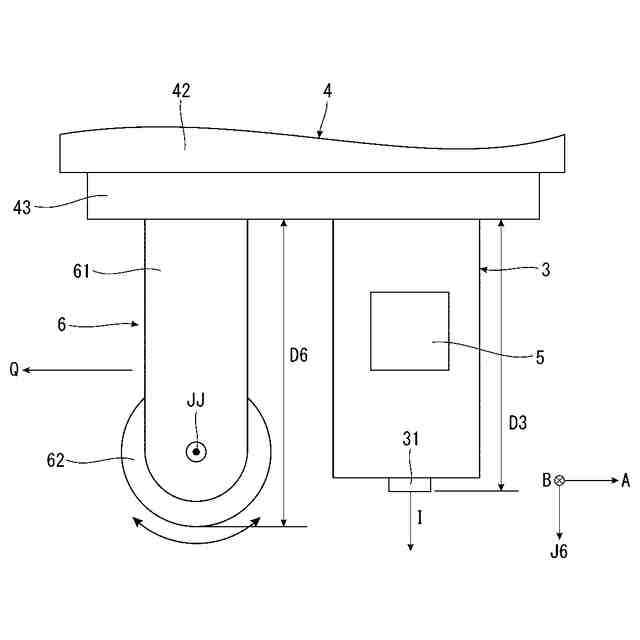
図1に示すロボットの先端部を示す側面図である。
印刷方法を説明するためのフローチャートである。
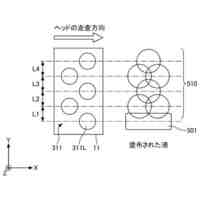
印刷作業の様子を示す図である。
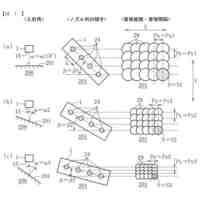
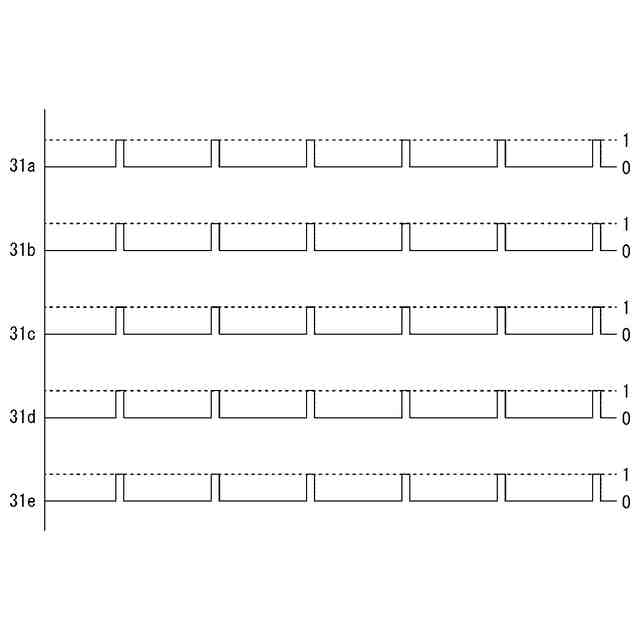
インクの吐出タイミングの一例を示すタイムチャートである。
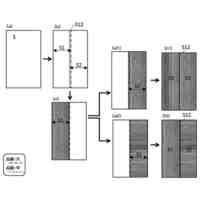
印刷作業の様子を示す図である。
従来の印刷方法の問題点を説明するための図である。
従来の印刷方法の問題点を説明するための図である。
従来の印刷方法の問題点を説明するための図である。
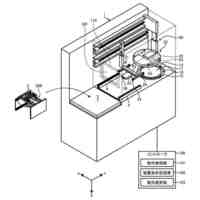
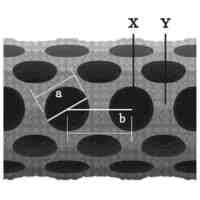
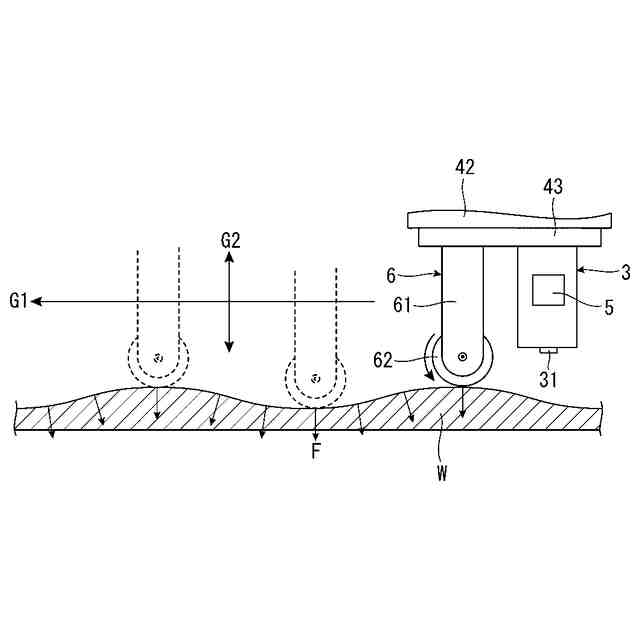
対象物の形状を検出する方法を説明するための図である。
対象物の形状を検出する方法を説明するための図である。
インク吐出タイミングの一例を示す図である。
離間距離検出ステップを説明するための図である。
図13に示すインク吐出タイミングを補正したインク吐出タイミングを示す図である。
第2実施形態に係るロボットシステムが有するロボットの先端部の構成を示す図である。
対象物の形状を検出する方法を説明するための図である。
対象物の形状を検出する方法を説明するための図である。
第3実施形態に係るロボットシステムを用いた印刷方法を説明するための図である。
【発明を実施するための形態】
【0008】
以下、本発明の印刷方法およびロボットシステムを添付図面に示す実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、第1実施形態に係るロボットシステムの全体図である。図2は、図1に示すロボットが備える移動ステージを示す平面図である。図3は、図1に示すロボットの先端部を示す側面図である。図4は、印刷方法を説明するためのフローチャートである。図5は、印刷作業の様子を示す図である。図6は、インクの吐出タイミングの一例を示すタイムチャートである。図7は、印刷作業の様子を示す図である。図8ないし図10は、それぞれ、従来の印刷方法の問題点を説明するための図である。図11および図12は、対象物の形状を検出する方法を説明するための図である。図13は、インク吐出タイミングの一例を示す図である。図14は、離間距離検出ステップを説明するための図である。図15は、図13に示すインク吐出タイミングを補正したインク吐出タイミングを示す図である。
【0010】
図1に示すロボットシステム1は、対象物Wへの印刷作業を行う印刷システムに適用されている。ロボットシステム1は、ロボット10と、ロボット10の駆動を制御する制御装置9と、を有する。また、ロボット10は、ロボット本体2と、ロボット本体2の先端に配置された移動ステージ4と、移動ステージ4とロボット本体2との間に配置された力覚センサー7と、移動ステージ4に配置された印刷ヘッド3および接触治具6と、印刷ヘッド3に配置された振動計5と、を有する。このようなロボットシステム1では、ロボットアーム22を用いて印刷ヘッド3を対象物Wに対して相対移動させつつ、印刷ヘッド3からインクIを吐出することにより対象物Wへの印刷作業を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ベック株式会社
被膜形成方法
1か月前
菊水化学工業株式会社
塗装方法
2か月前
ベック株式会社
装飾被膜の形成方法
1か月前
中外炉工業株式会社
塗布装置
1か月前
東レエンジニアリング株式会社
塗布装置
26日前
兵神装備株式会社
塗布検査システム
2か月前
富士合成株式会社
スラッジ回収構造
2か月前
株式会社吉野工業所
トリガー式吐出器
2か月前
株式会社マキタ
グリース吐出装置
17日前
トヨタ自動車東日本株式会社
塗料調色方法
1か月前
日本リグランド株式会社
流体散布ユニット
2か月前
ヤマホ工業株式会社
液体散布杆
5日前
株式会社吉野工業所
液体噴出器
2か月前
個人
ホースやノズルの長尺部の挟持具
1か月前
株式会社リコー
液滴吐出装置及び液滴吐出方法
1か月前
菊水化学工業株式会社
塗装方法
10日前
株式会社JVCケンウッド
噴霧装置、及び噴霧方法
10日前
株式会社リコー
液体塗布装置及びキャッピング方法
1か月前
株式会社カネカ
積層体の製造方法、及び成形体の製造方法
16日前
株式会社カーメイト
超音波型ミスト発生装置
2日前
トヨタ自動車株式会社
集電箔の製造方法
1か月前
株式会社ディスコ
被覆装置
1か月前
セイコーエプソン株式会社
液体噴射装置
1か月前
アスザック株式会社
塗液回収器およびスピンコーター
1か月前
トヨタ自動車株式会社
集電箔の製造方法
1か月前
株式会社リコー
液体吐出装置及び液体吐出方法
1か月前
株式会社不二越
塗布装置
2か月前
カシオ計算機株式会社
塗布装置、塗布方法及びプログラム
1か月前
デンカ株式会社
吹付ノズル及び吹付システム
3日前
株式会社SUBARU
塗布装置
1か月前
旭サナック株式会社
塗装装置
1か月前
株式会社エフコンサルタント
表面仕上げ方法及び再表面仕上げ方法
1か月前
太平洋セメント株式会社
流体ノズル
1か月前
太平洋セメント株式会社
流体ノズル
1か月前
株式会社吉野工業所
トリガー式液体噴出器
3日前
株式会社吉野工業所
トリガー式液体噴出器
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ