TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025072118
公報種別
公開特許公報(A)
公開日
2025-05-09
出願番号
2023182657
出願日
2023-10-24
発明の名称
車両制御装置、車両制御方法及び車両制御プログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250430BHJP(信号)
要約
【課題】本来不要なリスク低減処理を実行してしまうことを制限可能な車両制御装置を提供する。
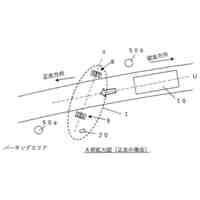
【解決手段】車両制御装置は、自車両に関する情報及び自車両の周辺に位置する物体に関する情報を取得するセンサと、センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行可能であるプロセッサと、を備える。プロセッサは、センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、第二車線上、他車両の前方に位置している障害物を検知し、且つ障害物への接近に伴い第一車線側へ移動している他車両の横方向速度であって、第二車線側から第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、リスク低減処理の実行を制限するように構成される。
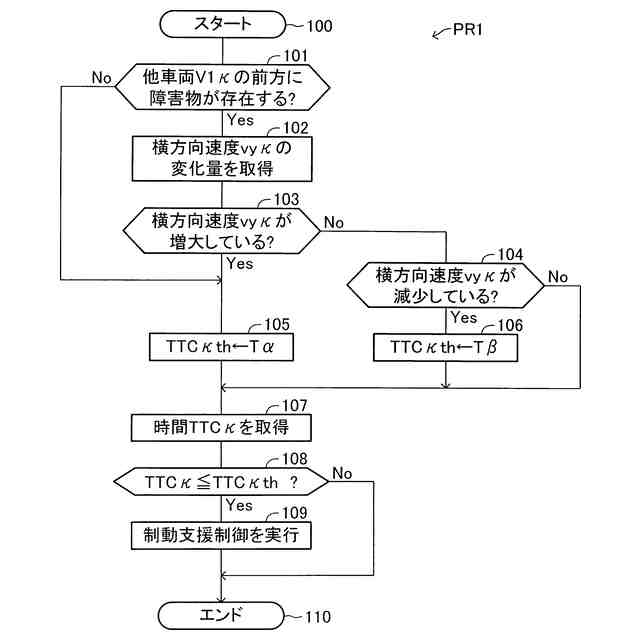
【選択図】図4
特許請求の範囲
【請求項1】
自車両に関する情報及び自車両の周辺に位置する物体に関する情報を取得するセンサと、
前記センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行可能であるプロセッサと、
を備えた車両制御装置であって、
前記プロセッサは、前記センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、前記第二車線うち、前記他車両の前方に位置している障害物を検知し、且つ前記障害物への接近に伴い前記第一車線側へ移動している前記他車両の横方向速度であって、前記第二車線側から前記第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、前記リスク低減処理の実行を制限するように構成された車両制御装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の車両制御装置において、
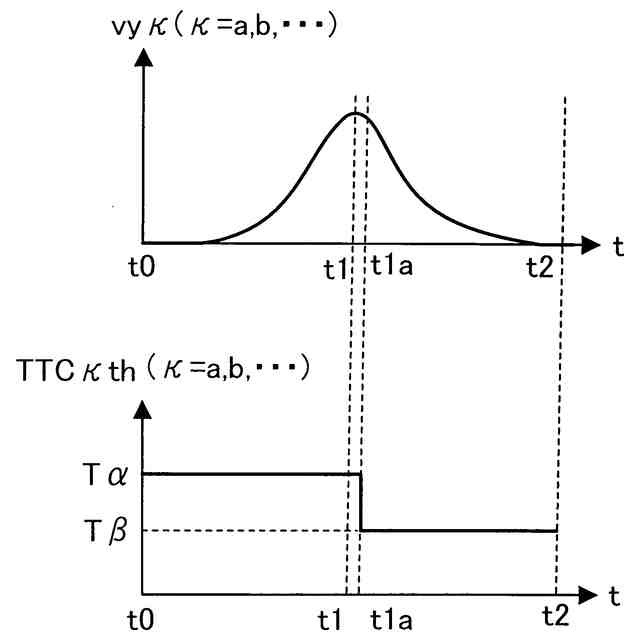
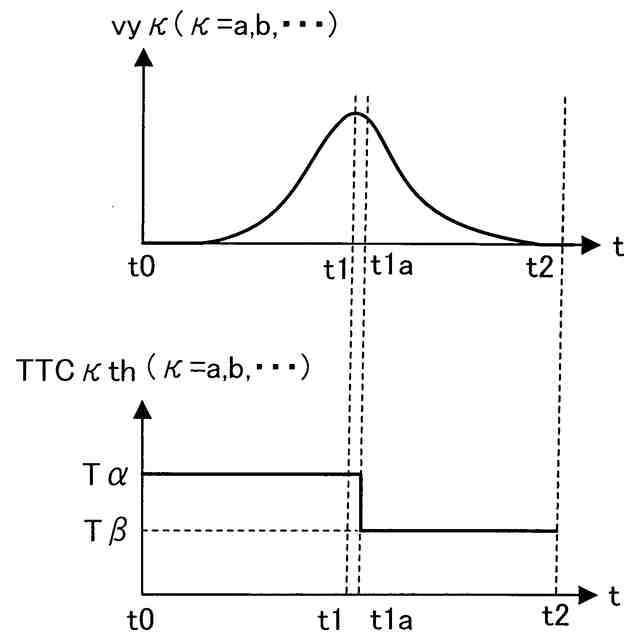
前記プロセッサは、前記リスク低減処理として、
前記センサから取得した情報に基づいて自車両と前記他車両とが接触するまでの予測時間を取得する処理と、
当該予測時間が閾値以下である場合に自車両を制動する運転操作が支援されるように自車両を制御する処理と、
を実行するように構成された車両制御装置。
【請求項3】
請求項2に記載の車両制御装置において、
前記プロセッサは、
前記特定状況を除く状況下で、前記閾値に第一の値を割り当て、
前記特定状況下で、前記閾値に前記第一の値より小さい第二の値を割り当てるように構成された車両制御装置。
【請求項4】
自車両に関する情報及び自車両の周辺に位置する物体に関する情報を取得する情報取得ステップと、
前記センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行するリスク低減ステップと、
を含む車両制御方法であって、
前記リスク低減ステップは、前記センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、前記第二車線うち、前記他車両の前方に位置している障害物を検知し、且つ前記障害物への接近に伴い前記第一車線側へ移動している前記他車両の横方向速度であって、前記第二車線側から前記第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、前記リスク低減処理の実行を制限する処理を含む、ように構成された車両制御方法。
【請求項5】
自車両が備えるコンピューターに、
自車両に関する情報及び自車両の周辺に位置する物体に関する情報を取得する情報取得ステップと、
前記センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行するリスク低減ステップと、
を実行させる車両制御プログラムであって、
前記リスク低減ステップは、前記センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、前記第二車線うち、前記他車両の前方に位置している障害物を検知し、且つ前記障害物への接近に伴い前記第一車線側へ移動している前記他車両の横方向速度であって、前記第二車線側から前記第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、前記リスク低減処理の実行を制限する処理を含む、ように構成された車両制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両と他車両とが接触するリスクを低減する機能を備えた車両制御装置、車両制御方法及び車両制御プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自車両と他車両とが接触するリスクを低減する機能を備えた車両制御装置が提案されている(例えば、下記特許文献1を参照。)。この車両制御装置(以下、「従来装置」と称呼する。)は、自車両の進路(予測軌跡)と対向車両の進路(予測軌跡)を取得する。従来装置は、自車両の予測軌跡と対向車両の予測軌跡が交差する場合に、自車両と対向車両とが接触するリスクが高いと判定し、当該リスクを低減するための処理(リスク低減処理)を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2020―142665号公報
【発明の概要】
【0004】
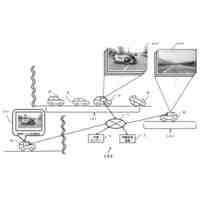
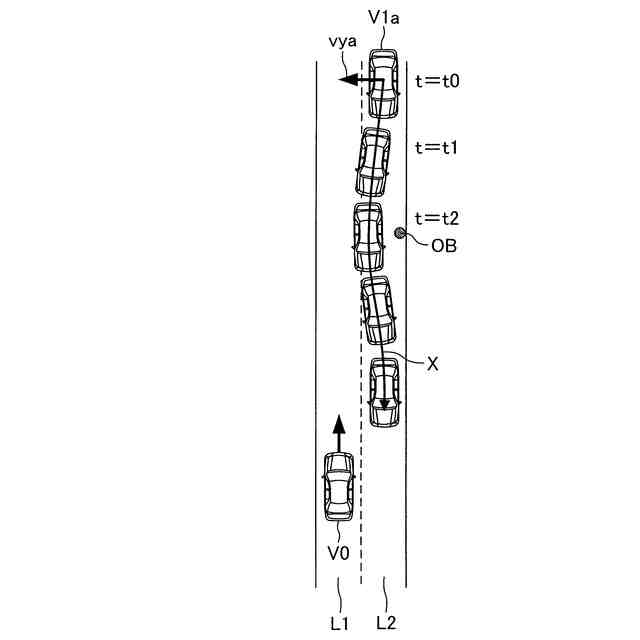
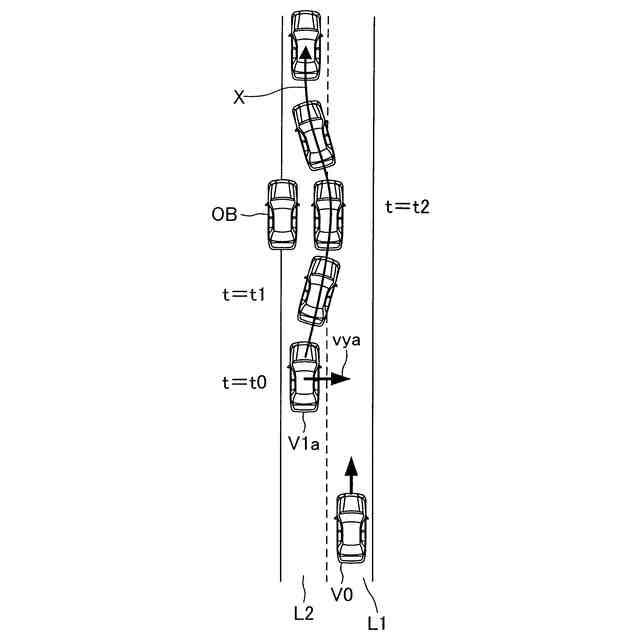
ところで、自車両が走行している第一車線に隣接する第二車線を他車両が走行している場合に、当該他車両が障害物を回避するために第一車線側へ移動するシーンが想定される。このシーンにおいて、他車両は一時的に第一車線に進入する場合がある。また、例えば、障害物が比較的小さく且つ第一車線とは反対側に偏在しているために、当該他車両は、第一車線へ進入することなく、第二車線内で横方向に移動するだけで障害物を回避可能である場合がある。このように、当該他車両の運転者は、当該他車両ができるだけ短い回避コースを通るように操舵する可能性が高い。
【0005】
従来装置は、他車両の位置を逐次取得する。従来装置は、取得した他車両の位置の変化に基づいて、他車両の予測軌跡を取得する。上記のシーンにおいて、他車両が障害物を回避し始めた段階では、他車両が徐々に第一車線へ近づいている。そのため、従来装置は、「他車両は、その後、引き続き第一車線側へ進み、第一車線へ進入してくる」と予測する。自車両が第一車線に沿って進行している場合、従来装置は、自車両と他車両との予測軌跡が交差すると判定し、リスク低減処理を開始する。すなわち、従来装置は、他車両が障害物を回避し始めた時点でリスク低減処理を開始する。
【0006】
しかしながら、上記のように、当該シーンにおいて、他車両(他車両の一部)が第一車線に進入したとしても、当該他車両(他車両の一部)が第一車線内に位置している時間は僅かである。また、他車両が第二車線内で横方向に移動するだけで障害物を回避可能である場合もある。すなわち、当該シーンでは、他車両は障害物を回避するために一時的に第一車線側へ進行したにすぎず、障害物を通過した後に速やかに第二車線の幅方向における中央部側へ進行する(第一車線から遠ざかる)可能性が高く、自車両と他車両とが接触する可能性が低い。それにもかかわらず、他車両が障害物の回避を開始した時点から従来装置がリスク低減処理を開始してしまい、自車両の運転者が当該処理を煩わしく感じる虞がある。
【0007】
本発明の目的の一つは、本来不要なリスク低減処理を実行してしまうことを制限可能な車両制御装置を提供することにある。
【0008】
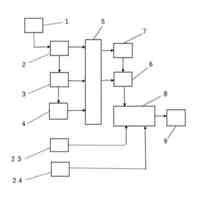
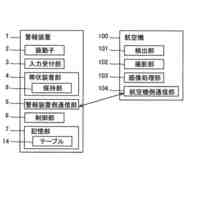
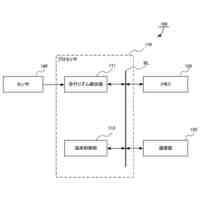
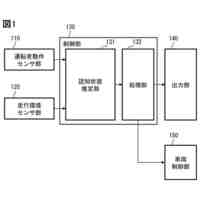
上記課題を解決するために、本発明の車両制御装置(1)は、
自車両(V0)に関する情報(v0)及び自車両の周辺に位置する物体(OB、V1κ)に関する情報(PR,vr)を取得するセンサ(20)と、
前記センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行可能であるプロセッサ(10)と、
を備える。
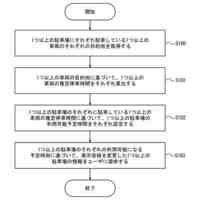
前記プロセッサは、前記センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、前記第二車線のうち、前記他車両の前方に位置している障害物を検知し、且つ前記障害物への接近に伴い前記第一車線側へ移動している前記他車両の横方向速度であって、前記第二車線側から前記第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、前記リスク低減処理の実行を制限するように構成される。
【0009】
また、本発明に係る車両制御方法は、
自車両に関する情報及び自車両の周辺に位置する物体に関する情報を取得する情報取得ステップと、
前記センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行するリスク低減ステップと、
を含む。
前記リスク低減ステップは、前記センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、前記第二車線うち、前記他車両の前方に位置している障害物を検知し、且つ前記障害物への接近に伴い前記第一車線側へ移動している前記他車両の横方向速度であって、前記第二車線側から前記第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、前記リスク低減処理の実行を制限する処理を含む。
【0010】
また、本発明に係る車両制御プログラムは、
自車両が備えるコンピューターに、
自車両に関する情報及び自車両の周辺に位置する物体に関する情報を取得する情報取得ステップと、
前記センサから取得した情報に基づいて自車両が他車両に接触するリスクが低減されるように自車両を制御するリスク低減処理を実行するリスク低減ステップと、
を実行させる。
前記リスク低減ステップは、前記センサから取得した情報に基づいて、自車両の車線である第一車線に隣接する第二車線を他車両が走行していて、前記第二車線うち、前記他車両の前方に位置している障害物を検知し、且つ前記障害物への接近に伴い前記第一車線側へ移動している前記他車両の横方向速度であって、前記第二車線側から前記第一車線側へ向かう横方向速度が減少していることを検知した特定状況下で、前記リスク低減処理の実行を制限する処理を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
個人
忘れ物検出装置
1か月前
個人
出会い頭事故防止装置
1か月前
能美防災株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
10日前
株式会社島津製作所
警報装置
1か月前
日本信号株式会社
情報提供システム
9日前
日本信号株式会社
情報管理システム
1か月前
ホーチキ株式会社
監視システム
1か月前
株式会社SUBARU
車速制御システム
1か月前
個人
磁気・光学誘導路線による車両の運行制御
3日前
株式会社JVCケンウッド
通知システム
1か月前
タック株式会社
安全監視システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
トヨタ自動車株式会社
配車システム
2日前
日本信号株式会社
路側装置及びセンサ装置
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
河村電器産業株式会社
警報装置
1か月前
株式会社デンソー
運転支援装置
1か月前
東亜電子工業株式会社
警報コントローラ
25日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社 ミックウェア
情報処理装置、情報処理方法
1か月前
能美防災株式会社
非常報知システム
17日前
愛知時計電機株式会社
生活データ集計装置
1か月前
矢崎総業株式会社
路面監視装置
1か月前
エムケー精工株式会社
信号機および信号機の発光制御方法
1か月前
パナソニックIPマネジメント株式会社
火災警報器
1か月前
トヨタ自動車株式会社
配車装置
9日前
トヨタ自動車株式会社
情報処理装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
日本電気株式会社
監視装置、監視方法、及びプログラム
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ