TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025073577
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023184496
出願日
2023-10-27
発明の名称
製造装置の運転条件を提供する方法及びシステム
出願人
株式会社日立製作所
代理人
青稜弁理士法人
主分類
G05B
1/01 20060101AFI20250502BHJP(制御;調整)
要約
【課題】擾乱や外乱に強いロバストな運転条件を提供する。
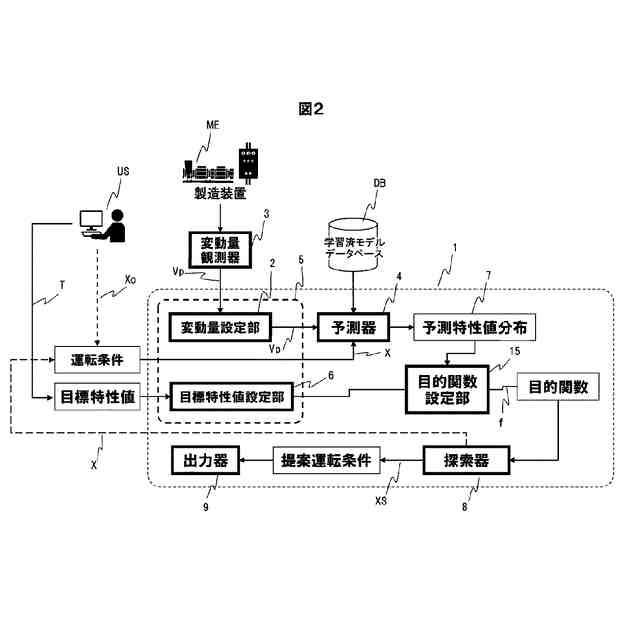
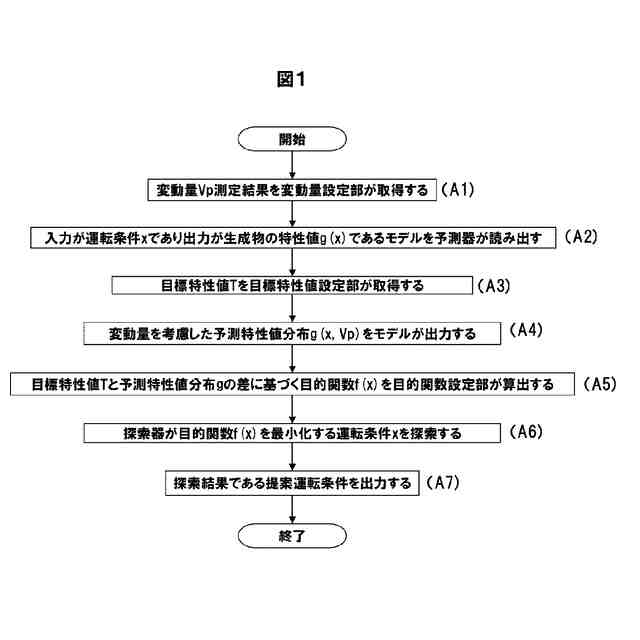
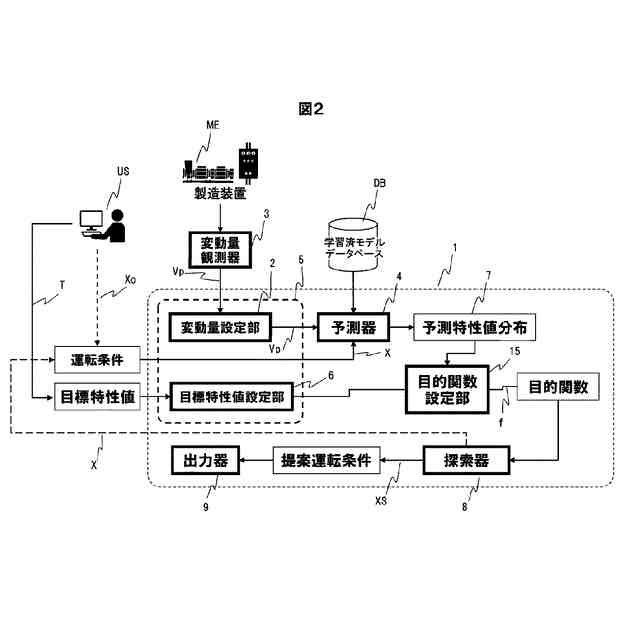
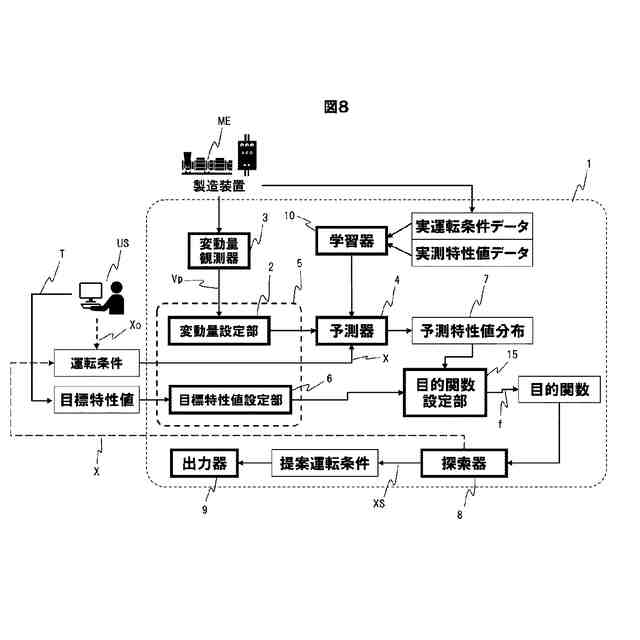
【解決手段】入力装置と出力装置とプロセッサとメモリを用いて、生成物を製造する製造装置の運転条件を提供する方法であって、変動量入力ステップと、前記プロセッサが、入力が前記運転条件であり出力が前記生成物の特性値であるモデルを、前記メモリから読み出す、モデル読出しステップと、目標特性値入力ステップと前記モデルを用いて前記所定の運転条件に関する変動量を反映した予測特性値分布を算出する、予測特性値分布算出ステップと、前記プロセッサが、前記予測特性値分布と前記目標特性値に基づく目的関数を算出する、目的関数算出ステップと、前記プロセッサが、前記目的関数を小さくするような前記所定の運転条件を探索する、運転条件探索ステップと、前記探索の結果となる運転条件を出力する、運転条件出力ステップと、からなることを特徴とする製造装置の運転条件を提供する方法。
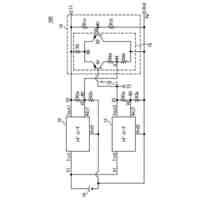
【選択図】図2
特許請求の範囲
【請求項1】
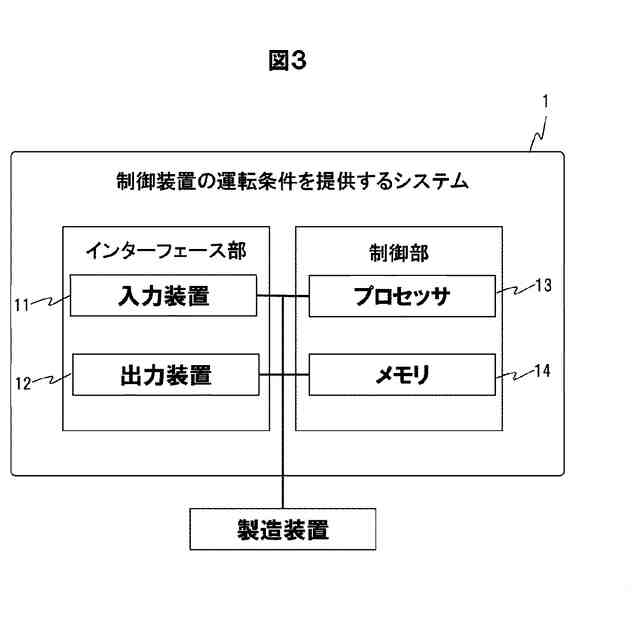
入力装置と出力装置とプロセッサとメモリを用いて、生成物を製造する製造装置の運転条件を提供する方法であって、
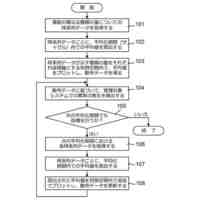
前記入力装置が、所定の運転条件に関する変動量を入力する、変動量入力ステップと、
前記プロセッサが、入力が前記運転条件であり出力が前記生成物の特性値であるモデルを、前記メモリから読み出す、モデル読出しステップと、
前記入力装置が、前記生成物の目標特性値を入力する、目標特性値入力ステップと、
前記プロセッサが、前記モデルを用いて前記所定の運転条件に関する変動量を反映した予測特性値分布を算出する、予測特性値分布算出ステップと、
前記プロセッサが、前記予測特性値分布と前記目標特性値に基づく目的関数を算出する、目的関数算出ステップと、
前記プロセッサが、前記目的関数を小さくするような前記所定の運転条件を探索する、運転条件探索ステップと、
前記探索の結果となる運転条件を出力する、運転条件出力ステップと、
からなることを特徴とする製造装置の運転条件を提供する方法。
続きを表示(約 1,500 文字)
【請求項2】
前記製造装置は、原料を変性させて前記生成物を製造する、
請求項1記載の製造装置の運転条件を提供する方法。
【請求項3】
前記所定の運転条件は所定の物理量の設定値であり、前記変動量は前記所定の物理量の設定値からの変動量である、
請求項1記載の製造装置の運転条件を提供する方法。
【請求項4】
前記所定の運転条件は前記製造装置の所定箇所の設定温度であり、前記変動量は前記設定温度からの変動量である、
請求項3記載の製造装置の運転条件を提供する方法。
【請求項5】
前記予測特性値分布算出ステップは、
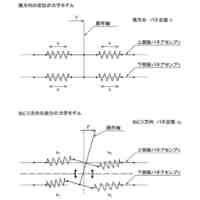
前記モデルの入力を前記運転条件Xとし、前記モデルの出力を前記生成物の特性値g(X)としたとき、
前記所定の物理量の設定値Xnを基準として、前記変動量のプラス側への最大変動値の絶対値をVpnp、マイナス側への最大変動値の絶対値をVpnmとし、
変動下限予測特性値g(Xn-Vpnm)と変動上限予測特性値g(Xn+Vpnp)の2点を計算し、その2点をもって前記予測特性値分布とする、
請求項3記載の製造装置の運転条件を提供する方法。
【請求項6】
前記予測特性値分布算出ステップは、
前記モデルの入力を前記運転条件Xとし、前記モデルの出力を前記生成物の特性値g(X)としたとき、
前記所定の物理量の設定値Xnを基準として、前記変動量のプラス側への最大変動値の絶対値をVpnp、マイナス側への最大変動値の絶対値をVpnmとし、
変動下限予測特性値g(Xn-Vpnm)から変動上限予測特性値g(Xn+Vpnp)のまでの範囲で、指定した探索数に応じて実験計画法によって選択された探索数点で前記特性値を計算し、それらを前記予測特性値分布とする、
請求項3記載の製造装置の運転条件を提供する方法。
【請求項7】
前記予測特性値分布算出ステップは、
前記モデルの入力を前記運転条件Xとし、前記モデルの出力を前記生成物の特性値g(X)としたとき、
前記所定の物理量の設定値Xnを基準として、前記変動量のプラス側への最大変動値の絶対値をVpnp、マイナス側への最大変動値の絶対値をVpnmとし、
変動下限予測特性値g(Xn-Vpnm)から変動上限予測特性値g(Xn+Vpnp)のまでの範囲で、前記所定の運転条件に関する変動量から所定の点数のデータをサンプリングし、サンプリングしたデータで前記特性値を計算し、それらを前記予測特性値分布とする、
請求項3記載の製造装置の運転条件を提供する方法。
【請求項8】
前記目的関数算出ステップは、
前記予測特性値分布に含まれる各値と前記目標特性値との平均二乗誤差を目的関数とする、
請求項3記載の製造装置の運転条件を提供する方法。
【請求項9】
前記目的関数算出ステップは、
前記予測特性値分布に含まれる各値と目標特性値との平均絶対誤差を目的関数とする、
請求項3記載の製造装置の運転条件を提供する方法。
【請求項10】
前記所定の運転条件が、一つの前記製造装置について複数あり、
複数の所定の運転条件のそれぞれについて、前記変動量入力ステップ、前記モデル読出しステップ、前記予測特性値分布算出ステップ、前記目的関数算出ステップ、前記運転条件探索ステップ、および前記運転条件出力ステップを実行する、
請求項3記載の製造装置の運転条件を提供する方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、製造装置の運転条件を提供する技術、例えばマテリアルインフォマティクスに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
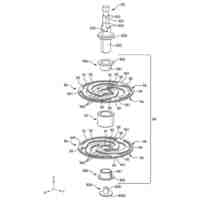
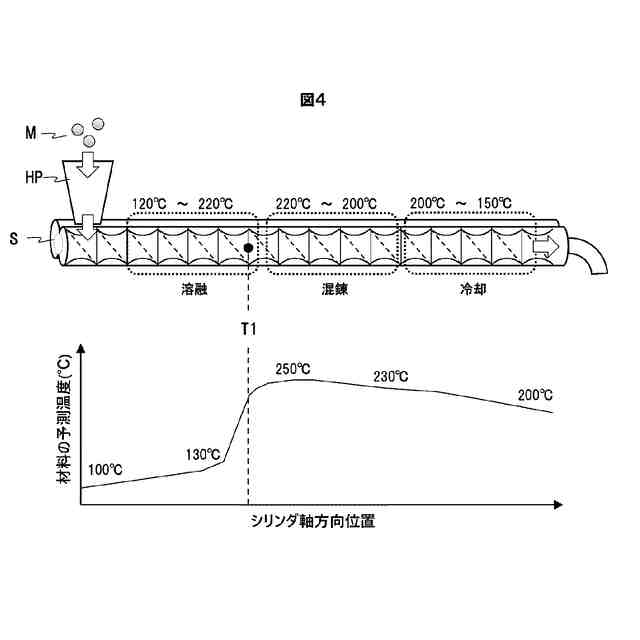
以下、本発明の適用先の一例として、製造装置として押出機を使ったプラスチック製造に於ける背景技術について説明する。
【0003】
近年プラスチックの高機能化では、添加剤やフィラーを付与し複数のポリマーを混合させることで機能発現するポリマーアロイが検討されている。これらの機能向上にはより高度な混錬分散技術が重要であり、連続生産機能と高度な混錬を両立する手段として押出機が用いられる。
【0004】
混錬に於ける押出機の運転では押出機内部での材料の粘度が非常に重要なパラメータであり、粘度を決める重要な指標の1つとして樹脂の温度が挙げられる。特にプラスチックの製造に於いては樹脂温度が高すぎると材料特性の劣化にも繋がる。そのため、押出機内部の時空間的な樹脂温度分布は正確に制御される必要がある。しかし実際には押出機内部に於ける真の樹脂温度分布を正確に制御することは簡単ではない。
【0005】
押出機内部の樹脂温度分布制御を困難にする原因の1つとして、樹脂温度の直接測定が難しいということが挙げられる。押出機内部に直接温度センサを導入することは可能だが、3次元的な分布を得ることは難しく、コスト、保守性の観点から実際には間接的な内部温度予測が行われている。間接的な内部温度予測方法としては、小スケール試験での知見から検討、またはシミュレーション等が挙げられる。
【0006】
一般に温度を含めた押出機の運転条件探索は、大規模な量産用機で行う前に小スケールの試験機で検討される。但し、小スケール検討で得られた知見を用いてスケールアップする際、単純に設備寸法を相似形で大きくしても小スケールに於ける混錬性能を大スケールで実現することは難しい。この理由の1つとして、熱交換の問題がある。例えば、押出機内部の樹脂が蓄える総熱量や反応による発熱量は体積に比例する為、スケールアップ時に寸法比の3乗で変化するが、発熱した樹脂が押出機のシリンダー内壁と接触し熱交換して冷却・制御される速度は面積に比例する為、スケールアップ時に寸法比の2乗で変化する。このため、小スケールで検討して得られた最適温度条件は、スケールアップ時に、そのプロセス自体が「伝熱主体のプロセス」なのか「温度依存性が小さいプロセス」なのか判断され、プロセスに合わせた適当な戦略が取られる。
【0007】
実際に量産機でプラスチックの大量生産を行う前に、多くの場合、計測不可能な温度等の値をシミュレーションによって確認する作業が行われる。但し、現在あるシミュレーターでは未だ、全ての運転条件パラメータや、装置の置かれた環境(気温・湿度などの外乱)の要因を全て考慮してシミュレーションを行うことが難しい。
【0008】
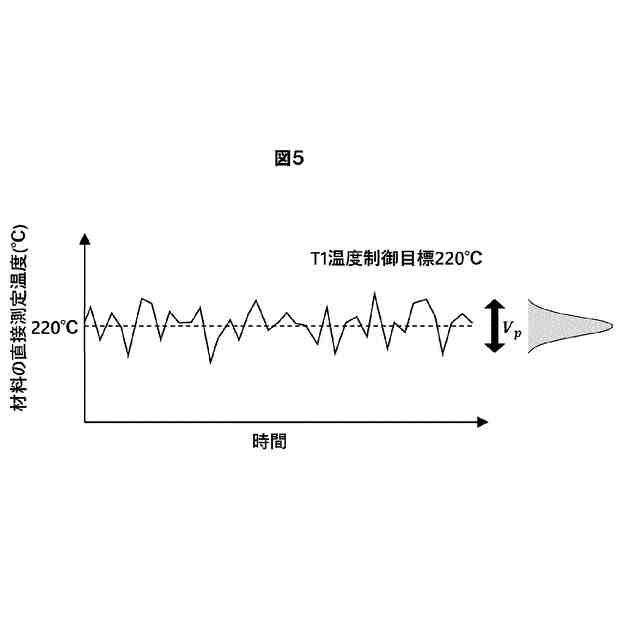
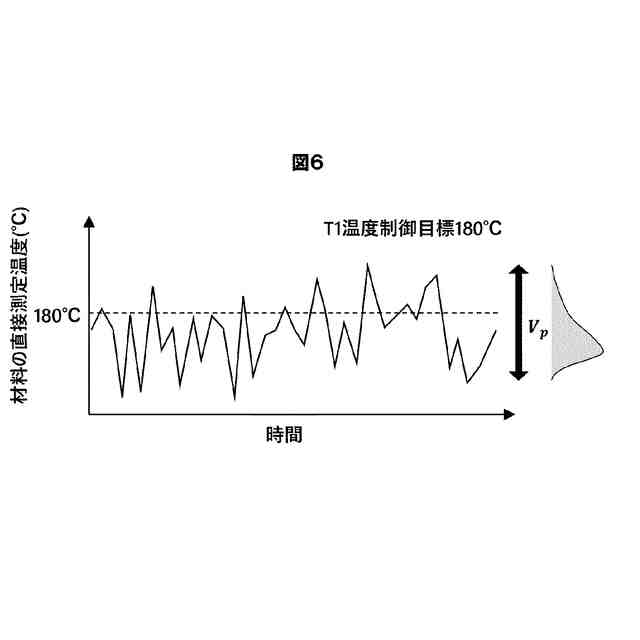
例えば、シミュレーションではシリンダー内部の充満率を100%と仮定して計算を行う場合が多く、気液界面が存在する充満率100%未満では計算難易度が著しく増大する。そのため、シミュレーションでは充満率100%として計算を行っていたとしても、実際には気液界面が存在し、更に相によって温度が異なる。また、同相であっても擾乱により様々なスケールで温度分布が存在することも考えられ、仮に温度計でシリンダー内部の1点を測定していても温度変動が常に観測される。
【0009】
また、シリンダー温度は運転条件パラメータであり、一定温度に制御されているが、制御方式によっては温度が微小なスケールで常に振動している。また、天候など制御外の外乱により製品品質に影響する様な温度変動を発生することがある。従来、これらの温度変動が製造品質に影響し、目標品質から逸脱した場合、熟練者が経験に基づいて運転条件パラメータを調整することで品質を安定化・最適化させていた。
【0010】
近年は機械学習技術の進展により、運転条件から処理結果を予測する学習モデルの構築が出来る様になってきている。またそのような学習モデルを用いて、目標とする処理結果を満たす運転条件を探索することが可能となっている。しかしこのような運転条件探索技術に於いては、未だ擾乱や外乱を考慮した運転条件最適化が為されておらず、また外乱には同型装置であっても装置部品の個体差や設置場所が異なる等様々な外的要因が存在し、その外乱が処理結果に与える影響は様々で装置設置前に決定することが出来ない問題もある。このため、擾乱や外乱によって乱される条件値の経時的な分散や確率分布を考慮した最適化が求められている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
三菱電機株式会社
自己位置推定装置
2日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社やまびこ
走行制御装置
23日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
今日
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
17日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
WHILL株式会社
電動モビリティ
1日前
日本精工株式会社
制御装置および制御方法
1か月前
日本信号株式会社
自走式装置
7日前
チームラボ株式会社
走行システム及び走行路
2か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
今日
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
株式会社デンソー
診断装置
21日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
井関農機株式会社
作業車両
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
17日前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ