TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025073738
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023184775
出願日
2023-10-27
発明の名称
操舵制御装置
出願人
株式会社ジェイテクト
,
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B62D
6/00 20060101AFI20250502BHJP(鉄道以外の路面車両)
要約
【課題】転舵モータの出力の急変を抑制することができる操舵制御装置を提供する。
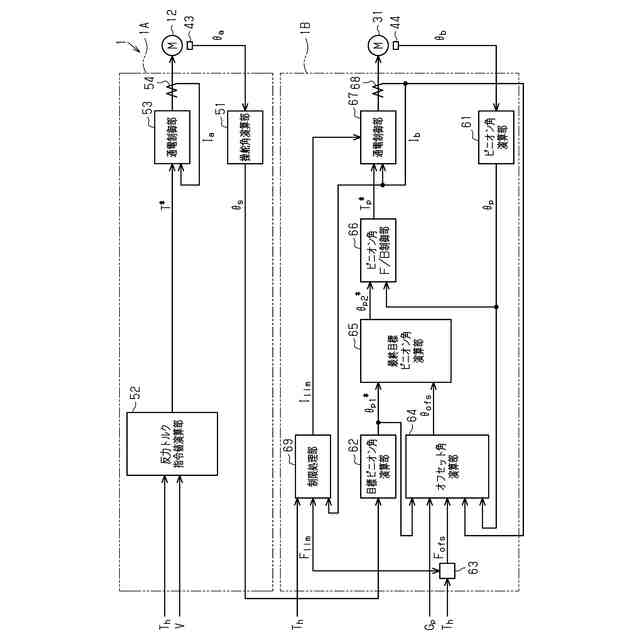
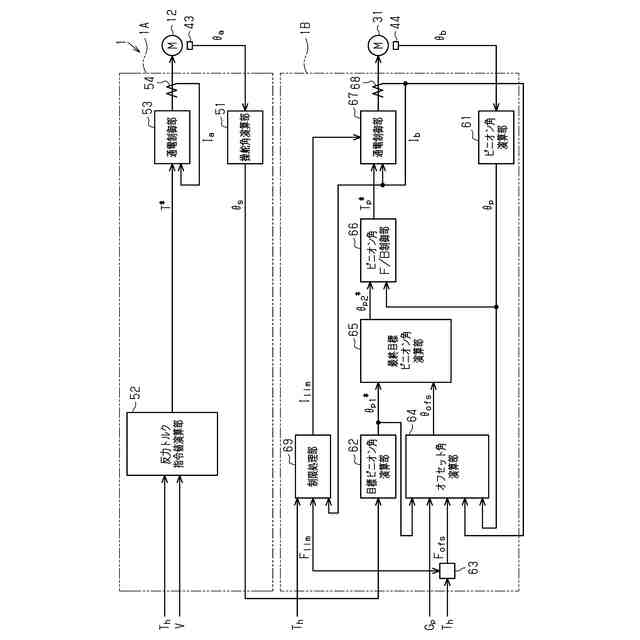
【解決手段】操舵制御装置1は、目標ピニオン角演算部62、オフセット角演算部64、最終目標ピニオン角演算部65、およびピニオン角フィードバック制御部66を有する。オフセット角演算部64は、目標ピニオン角θ
p1
*
とピニオン角θ
p
とが乖離した状態で特定の事象が発生した場合、オフセット角θ
ofs
を演算する。最終目標ピニオン角演算部65は、目標ピニオン角θ
p1
*
とオフセット角θ
ofs
とから最終目標ピニオン角θ
p2
*
を演算する。ピニオン角フィードバック制御部66は、ピニオン角θ
p
のフィードバック制御を実行する。オフセット角演算部64は、推定ピニオン角偏差Δθ
p
^を演算し、目標ピニオン角θ
p1
*
からピニオン角θ
p
と推定ピニオン角偏差Δθ
p
^とを減算することによりオフセット角θ
ofs
を演算する。
【選択図】図2
特許請求の範囲
【請求項1】
車両の転舵輪を転舵させる操舵装置を駆動する転舵モータに対する給電を制御するように構成される操舵制御装置であって、
前記転舵輪の転舵動作に連動して回転するシャフトの目標回転角をステアリングホイールの操舵角に応じて演算するように構成される目標回転角演算部と、
前記目標回転角と前記シャフトの実角度とが乖離した状態で特定の事象が発生した場合、前記目標回転角に対するオフセット角を演算するように構成されるオフセット角演算部と、
前記目標回転角から前記オフセット角を減算することにより前記シャフトの最終目標回転角を演算するように構成される最終目標回転角演算部と、
前記最終目標回転角に前記実角度を追従させるフィードバック制御を実行するように構成されるフィードバック制御部と、を有し、
前記オフセット角演算部は、前記特定の事象が発生する直前の前記転舵モータの電流の値に基づき推定回転角偏差を演算し、前記目標回転角から前記実角度と前記推定回転角偏差とを減算することにより前記オフセット角を演算するように構成される操舵制御装置。
続きを表示(約 910 文字)
【請求項2】
前記オフセット角演算部は、前記オフセット角を演算した後、前記オフセット角を零に向けて徐々に減少させるように構成される請求項1に記載の操舵制御装置。
【請求項3】
前記フィードバック制御部は、前記最終目標回転角に対する前記実角度の偏差に比例して前記実角度を制御する比例制御を実行するように構成され、
前記推定回転角偏差を「Δθ
p
^」、前記特定の事象が発生する直前の前記転舵モータの電流の値を「I
b
」、前記フィードバック制御部の比例ゲインを「G
p
」、前記転舵モータ31の定格電流を「I
t
」、定格ピニオントルクを「T
p
」とするとき、
前記オフセット角演算部は、次式(A)
Δθ
p
^=I
b
/{G
p
・I
t
/T
p
} …(A)
に基づき前記推定回転角偏差を演算するように構成される請求項1または請求項2に記載の操舵制御装置。
【請求項4】
前記特定の事象は、前記転舵モータに供給される電流が制限される電流制限処理の実行が終了されることである請求項1または請求項2に記載の操舵制御装置。
【請求項5】
前記特定の事象は、前記車両の電源が投入されることである請求項1または請求項2に記載の操舵制御装置。
【請求項6】
前記操舵装置は、前記ステアリングホイールと前記転舵輪との間の動力伝達が分離されたステアバイワイヤ式の操舵装置である請求項1または請求項2に記載の操舵制御装置。
【請求項7】
前記操舵装置は、前記ステアリングホイールと前記転舵輪とが動力伝達可能に連結された電動パワーステアリング装置であって、前記ステアリングホイールの操舵角に対する前記転舵輪の転舵角の比であるステアリングギヤ比を変更する可変ギヤ比機能を有する電動パワーステアリング装置である請求項1または請求項2に記載の操舵制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操舵制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
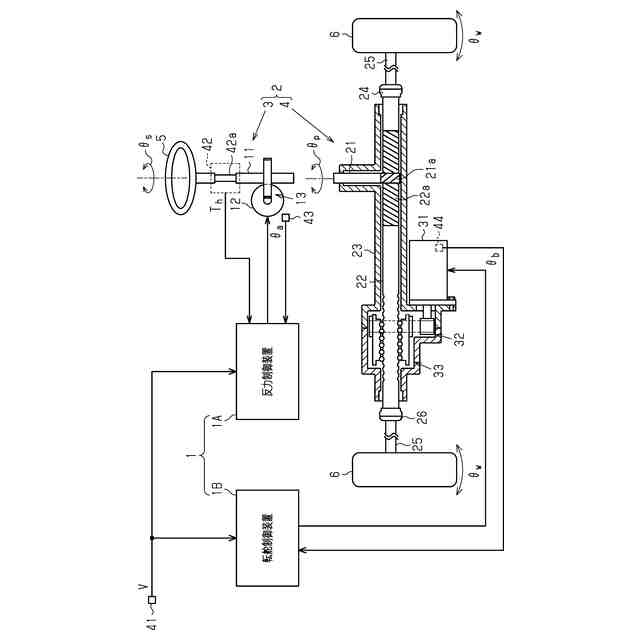
従来、ステアリングホイールと転舵輪との間の動力伝達を分離した、いわゆるステアバイワイヤ方式の操舵装置が存在する。操舵装置は、ステアリングシャフトに付与される操舵反力の発生源である反力モータと、転舵輪を転舵させる転舵力の発生源である転舵モータとを備えている。操舵装置の制御装置は、反力モータに対する給電制御を通じて操舵反力を発生させるとともに、転舵モータに対する給電制御を通じて転舵輪を転舵させる。
【0003】
たとえば、特許文献1の制御装置は、出力制限条件が成立する場合、転舵モータの出力を制限する出力制限処理を実行する。出力制限条件は、たとえば、転舵モータの温度が温度閾値を超えること、あるいは、転舵モータに供給される電圧が電圧閾値未満となることを含む。出力制限処理の実行を通じて、転舵モータの温度上昇、あるいは、転舵モータの消費電力が制限される。
【先行技術文献】
【特許文献】
【0004】
特開2020-83059号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の制御装置を含め、転舵モータの出力を制限する機能を有する従来の制御装置には、つぎのような懸念がある。すなわち、出力制限条件の不成立、あるいは定められた出力制限の解除条件が成立することにより、転舵モータの出力制限が解除されると、転舵モータの出力が急激に変化するおそれがある。転舵モータの出力の急変は、異音あるいは振動の発生の一因となる。
【課題を解決するための手段】
【0006】
上記課題を解決し得る操舵制御装置は、車両の転舵輪を転舵させる操舵装置を駆動する転舵モータに対する給電を制御するように構成される。操舵制御装置は、前記転舵輪の転舵動作に連動して回転するシャフトの目標回転角をステアリングホイールの操舵角に応じて演算するように構成される目標回転角演算部と、特定の事象が発生した場合、前記目標回転角に対するオフセット角を演算するように構成されるオフセット角演算部と、前記目標回転角から前記オフセット角を減算することにより前記シャフトの最終目標回転角を演算するように構成される最終目標回転角演算部と、前記最終目標回転角に前記実角度を追従させるフィードバック制御を実行するように構成されるフィードバック制御部と、を有する。前記オフセット角演算部は、前記特定の事象が発生する直前の前記転舵モータの電流の値に基づき推定回転角偏差を演算し、前記目標回転角から前記実角度と前記推定回転角偏差とを減算することにより前記オフセット角を演算するように構成される。
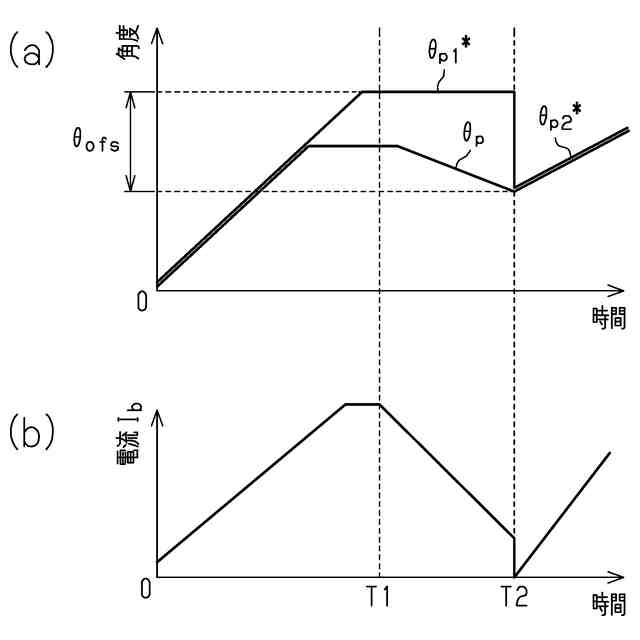
【0007】
この構成によれば、特定の事象が発生した場合、最終目標回転角がシャフトの実角度の今回値に一致することがない。このため、転舵モータに供給される電流の絶対値は急激に減少するものの、転舵モータに供給される電流の絶対値が瞬時に「0」に達することはない。したがって、転舵モータに供給される電流の絶対値が瞬時に「0」に達することに起因する転舵モータの出力の急変、ひいては転舵輪の転舵角の急変を抑制することができる。
【0008】
上記の操舵制御装置において、前記オフセット角演算部は、前記オフセット角を演算した後、前記オフセット角を零に向けて徐々に減少させるように構成されてもよい。
この構成によれば、転舵モータの出力の急変を抑えつつ、シャフトの実角度を最終目標回転角に追従させることができる。
【0009】
上記の操舵制御装置において、前記フィードバック制御部は、前記最終目標回転角に対する前記実角度の偏差に比例して前記実角度を制御する比例制御を実行するように構成されてもよい。この場合、前記推定回転角偏差を「Δθ
p
^」、前記特定の事象が発生する直前の前記転舵モータの電流の値を「I
b
」、前記フィードバック制御部の比例ゲインを「G
p
」、前記転舵モータ31の定格電流を「I
t
」、定格ピニオントルクを「T
p
」とするとき、前記オフセット角演算部は、次式(A)に基づき前記推定回転角偏差を演算するように構成される。
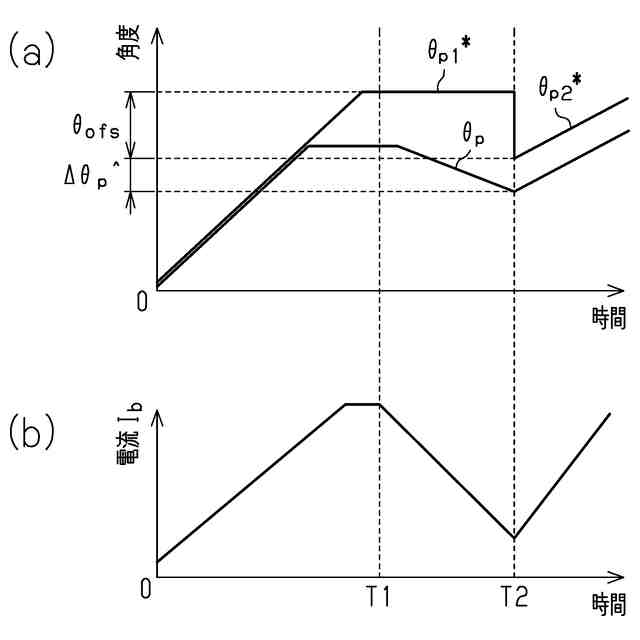
【0010】
Δθ
p
^=I
b
/{G
p
・I
t
/T
p
} …(A)
この構成によれば、シャフトの推定回転角偏差を、前回から今回までの間の比例制御による修正分の角度として演算することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
乗り物
6日前
個人
折り畳み自転車
5か月前
個人
発音装置
2か月前
個人
電動モビリティ
2か月前
個人
自転車用傘捕捉具
6か月前
個人
自転車用荷台
9か月前
個人
自由方向乗車自転車
2か月前
個人
体重掛けリフト台車
5か月前
井関農機株式会社
作業車両
11か月前
個人
自転車用荷物台
6か月前
個人
アタッチメント
6か月前
個人
キャンピングトライク
3か月前
株式会社CPM
駐輪機
6か月前
個人
スライドレインプルーフ
12か月前
個人
ステアリングの操向部材
3か月前
株式会社クラベ
面状ユニット
12か月前
個人
ステアリングの操向部材
9か月前
帝人株式会社
車両構造体
11か月前
祖峰企画株式会社
平台車
10か月前
三甲株式会社
台車
8か月前
三甲株式会社
台車
8か月前
株式会社三五
リアサブフレーム
5か月前
ダイハツ工業株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
豊田合成株式会社
操舵装置
6か月前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
個人
足踏みペダル式自転車
11か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
アルインコ株式会社
運搬台車
11か月前
コンビ株式会社
乳母車
1か月前
個人
自転車の駐輪場システム
21日前
株式会社クボタ
作業車
10か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ