TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079107
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191569
出願日
2023-11-09
発明の名称
ロボット、自律走行ロボットシステム、誘導方法、制御方法、およびプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250514BHJP(制御;調整)
要約
【課題】台車に搭載したロボットに誘導させることにより、台車を最小限の機器およびコストで構成しつつ、経路に沿って精度よく移動させることができるロボットを提供する。
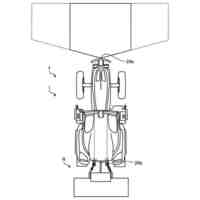
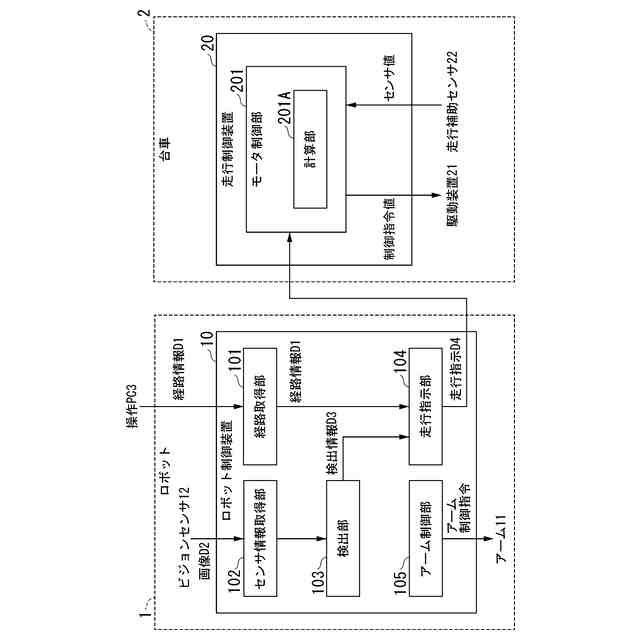
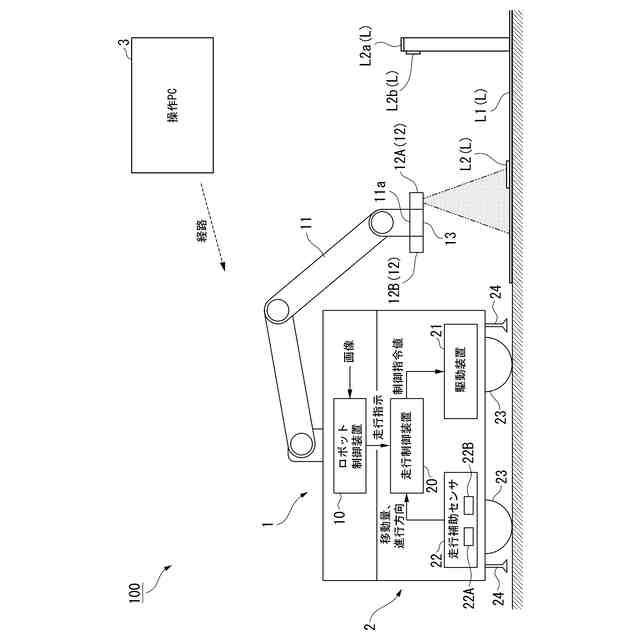
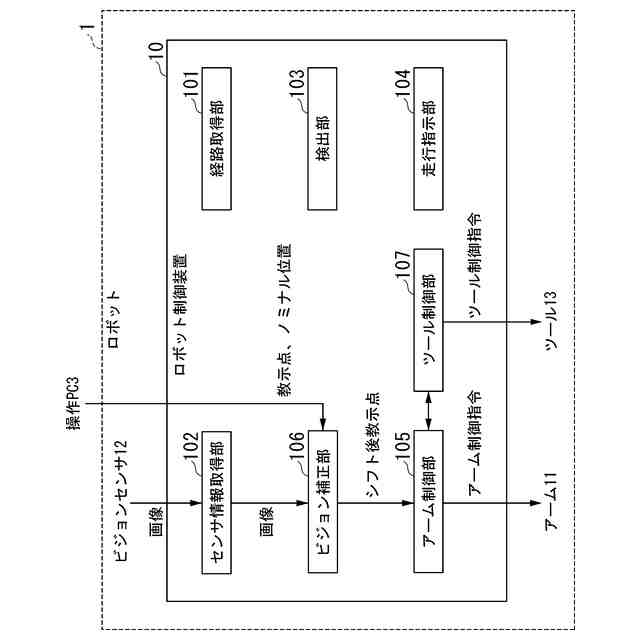
【解決手段】ロボットは、自律走行可能な台車に搭載されるロボットであって、先端の位置および姿勢を任意に変更可能なアームと、前記アームの先端に取り付けられたビジョンセンサと、前記ビジョンセンサにより撮影された画像に含まれる目印に基づいて、指定された経路に対する前記台車のずれ量を検出する検出部と、前記ずれ量に基づいて、前記台車の走行位置または走行姿勢を補正するように前記台車に指示する走行指示部と、を備える。
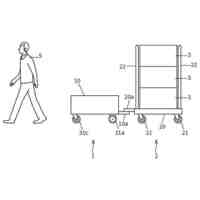
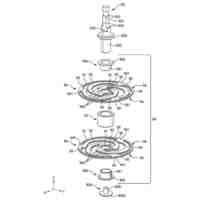
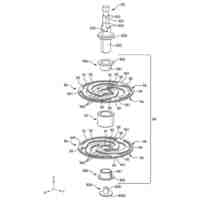
【選択図】図2
特許請求の範囲
【請求項1】
自律走行可能な台車に搭載されるロボットであって、
先端の位置および姿勢を任意に変更可能なアームと、
前記アームの先端に取り付けられたビジョンセンサと、
前記ビジョンセンサにより撮影された画像に含まれる目印に基づいて、指定された経路に対する前記台車のずれ量を検出する検出部と、
前記ずれ量に基づいて、前記台車の走行位置または走行姿勢を補正するように前記台車に指示する走行指示部と、
を備えるロボット。
続きを表示(約 2,000 文字)
【請求項2】
前記検出部は、前記画像に含まれる前記目印の位置および角度と、基準位置および基準角度との差に基づいて前記ずれ量を検出する、
請求項1に記載のロボット。
【請求項3】
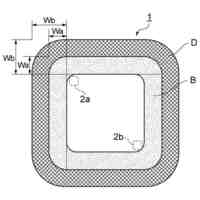
前記目印は二次元コードであり、
前記検出部は、前記画像に含まれる前記二次元コードから走行位置、停車、ターン、および走行速度のうち少なくとも一つを示す情報を読み取り、
前記走行指示部は、前記二次元コードから読み取った情報に基づいて、次の移動先、停車、ターン、および走行速度のうち少なくとも一つを前記台車に指示する、
請求項1または2に記載のロボット。
【請求項4】
前記目印は前記台車の作業エリア内の構造物であり、
前記検出部は、前記構造物の形状と、走行位置、停車、ターンおよび走行速度のうち少なくとも一つを示す情報とを記録した参照用データと、前記画像から検出された形状とを照合して、前記情報のうち少なくとも一つを検出し、
前記走行指示部は、検出した前記情報に基づいて、次の移動先、停車、ターン、および走行速度のうち少なくとも一つを前記台車に指示する、
請求項1または2に記載のロボット。
【請求項5】
前記アームの先端の位置および姿勢を制御するアーム制御部をさらに備え、
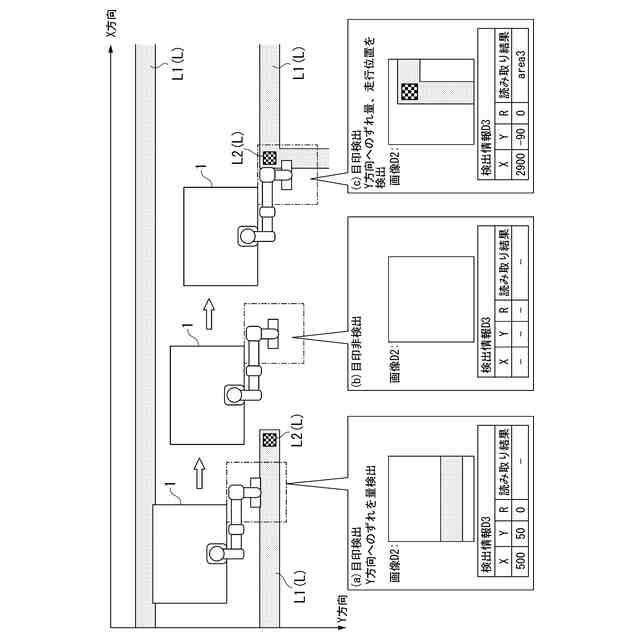
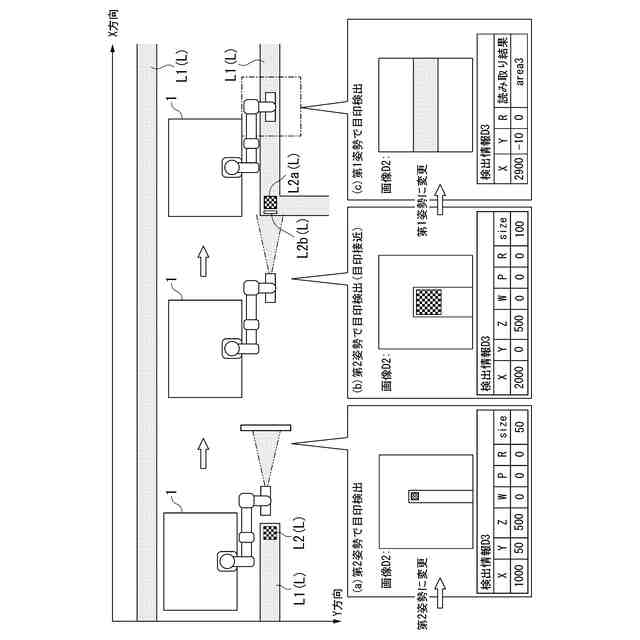
前記目印は、垂直方向を向くように付された第1目印と、水平方向を向くように付された第2目印とを有し、
前記アーム制御部は、
前記台車の走行中、前記ビジョンセンサが垂直方向を向いて前記第1目印を撮影可能とする第1姿勢となるように前記アームを制御し、
前記台車の走行中、かつ、前記第1姿勢で撮影された前記画像に第1目印が含まれない場合に、前記ビジョンセンサが水平方向を向いて前記第2目印を撮影可能とする第2姿勢となるように前記アームを制御する、
請求項1または2に記載のロボット。
【請求項6】
前記検出部は、前記アームが前記第2姿勢のときに、前記第2目印のサイズをさらに検出し、
前記アーム制御部は、検出された前記第2目印のサイズが所定サイズ以上となった場合に、前記アームを前記第2姿勢から前記第1姿勢に切り替える、
請求項5に記載のロボット。
【請求項7】
前記ビジョンセンサが撮影した画像に基づいて、ワークのユーザ座標系を、前記ワークの実際の位置および姿勢に合わせて補正するビジョン補正部と、
前記アームの先端に取り付けられたツールの先端点が補正後の前記ユーザ座標系における作業点に移動するように、前記アームの位置および姿勢を制御するアーム制御部と、
をさらに備える請求項1または2に記載のロボット。
【請求項8】
ワークに対する所定作業を自動で行うロボットであって、
先端の位置および姿勢を任意に変更可能なアームと、
前記アームの先端に取り付けられたビジョンセンサと、
前記アームの先端に取り付けられたツールと、
前記ビジョンセンサが撮影した画像に基づいて、ワークのユーザ座標系を、前記ワークの実際の位置および姿勢に合わせて補正するビジョン補正部と、
前記アームの先端に取り付けられたツールの先端点が補正後の前記ユーザ座標系における作業点に移動するように、前記アームの位置および姿勢を制御するアーム制御部と、
を備えるロボット。
【請求項9】
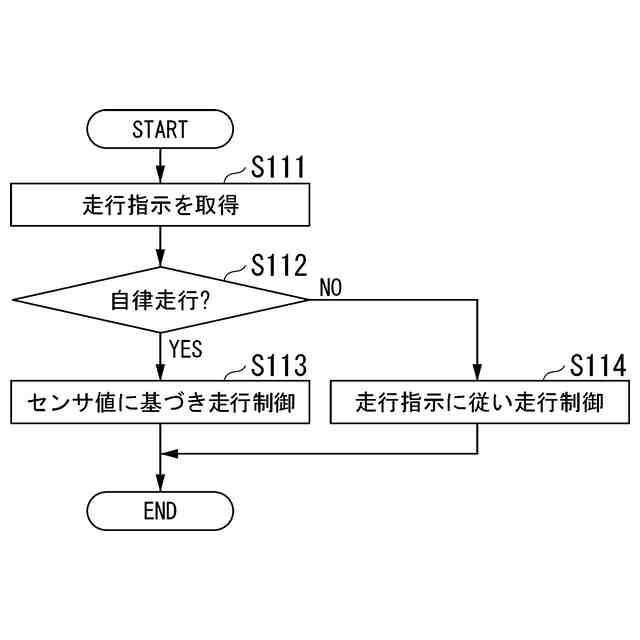
台車と、請求項1または2に記載のロボットとを備える自律走行ロボットシステムであって、
前記ロボットの前記走行指示部は、前記画像に前記目印が含まれない場合に、前記台車に自律走行するように指示し、
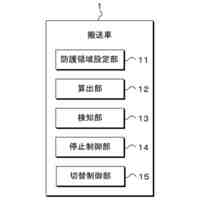
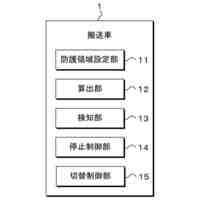
前記台車は、
移動量および進行方向を検出可能な走行補助センサと、
前記自律走行の指示を受け付けた場合に、前記走行補助センサが検出した移動量および進行方向に基づいて、前記台車を自律走行させる走行制御装置と、
を有する、
自律走行ロボットシステム。
【請求項10】
自律走行可能な台車に搭載され、先端の位置および姿勢を任意に変更可能なアームと、前記アームの先端に取り付けられたビジョンセンサとを有するロボットを用いた前記台車の誘導方法であって、
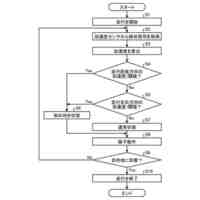
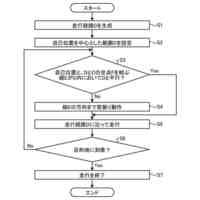
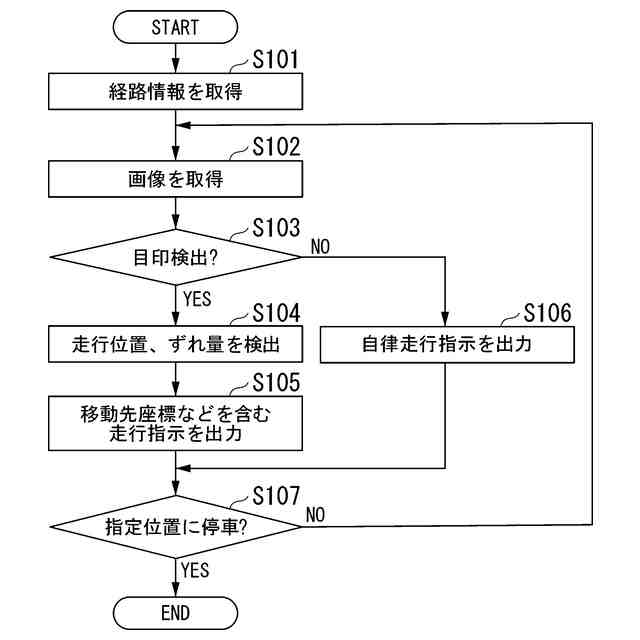
前記ビジョンセンサにより撮影された画像に含まれる目印に基づいて、指定された経路に対する前記台車のずれ量を検出するステップと、
前記ずれ量に基づいて、前記台車の走行位置または走行姿勢を補正するように前記台車に指示するステップと、
を有する誘導方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット、自律走行ロボットシステム、誘導方法、制御方法、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
無人搬送車(AGV:Automated Guided Vehicle)にロボットを搭載し、作業位置までロボットを自動的に搬送することが考えられている(たとえば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特許第2680298号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットを搭載したAGVは、磁気誘導式や光学誘導式などの誘導方式で自律走行する。一般的に、従来の市販されているAGVは、誘導方式に応じたセンサや、自律走行制御用の各種機能が専用化されて搭載されており、非常に高機能かつ高価なものである。したがって、たとえば工場で市販のAGVを導入する場合、工場では利用しない機能(たとえば、自動搬送のスケジューリングやマップ作成機能など)が含まれている場合があり、用途に対して機器構成やコストが過剰となってしまう可能性がある。また、市販のAGVは走行土間が平坦で安定的に走行可能な環境で運用されることを前提としており、走行土間に凹凸があるような環境では、正しい経路で走行することが困難となる可能性がある。
【0005】
また、AVGが正しい作業位置に精密に移動できないと、ロボットとワークの相対位置がずれてしまい、ロボットがワーク上の正しい作業点にツールを移動させて作業を行うことが困難となる。そうすると、ロボットによる作業の精度が低下してしまう。
【0006】
本開示の目的は、台車に搭載したロボットに誘導させることにより、台車を最小限の機器およびコストで構成しつつ、経路に沿って精度よく移動させることができるロボット、自律走行ロボットシステム、誘導方法、制御方法、およびプログラムを提供することにある。
【課題を解決するための手段】
【0007】
本開示の一態様によれば、ロボットは、自律走行可能な台車に搭載されるロボットであって、先端の位置および姿勢を任意に変更可能なアームと、前記アームの先端に取り付けられたビジョンセンサと、前記ビジョンセンサにより撮影された画像に含まれる目印に基づいて、指定された経路に対する前記台車のずれ量を検出する検出部と、前記ずれ量に基づいて、前記台車の走行位置または走行姿勢を補正するように前記台車に指示する走行指示部と、を備える。
【0008】
本開示の一態様によれば、ロボットは、ワークに対する所定作業を自動で行うロボットであって、先端の位置および姿勢を任意に変更可能なアームと、前記アームの先端に取り付けられたビジョンセンサと、前記アームの先端に取り付けられたツールと、前記ビジョンセンサが撮影した画像に基づいて、ワークのユーザ座標系を、前記ワークの実際の位置および姿勢に合わせて補正するビジョン補正部と、前記アームの先端に取り付けられたツールの先端点が補正後の前記ユーザ座標系における作業点に移動するように、前記アームの位置および姿勢を制御するアーム制御部と、を備える。
【0009】
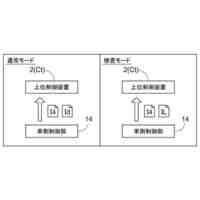
本開示の一態様によれば、自律走行ロボットシステムは、台車と、上述のロボットとを備える自律走行ロボットシステムであって、前記ロボットの前記走行指示部は、前記画像に前記目印が含まれない場合に、前記台車に自律走行するように指示し、前記台車は、移動量および進行方向を検出可能な走行補助センサと、前記自律走行の指示を受け付けた場合に、前記走行補助センサが検出した移動量および進行方向に基づいて、前記台車を自律走行させる走行制御装置と、を有する。
【0010】
本開示の一態様によれば、誘導方法は、自律走行可能な台車に搭載され、先端の位置および姿勢を任意に変更可能なアームと、前記アームの先端に取り付けられたビジョンセンサとを有するロボットを用いた前記台車の誘導方法であって、前記ビジョンセンサにより撮影された画像に含まれる目印に基づいて、指定された経路に対する前記台車のずれ量を検出するステップと、前記ずれ量に基づいて、前記台車の走行位置または走行姿勢を補正するように前記台車に指示するステップと、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電圧回路
1か月前
和研工業株式会社
多連レバー機構
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
トヨタ自動車株式会社
ペダル機構
1日前
株式会社ダイフク
搬送設備
2日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
三菱電機株式会社
自己位置推定装置
11日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
9日前
株式会社やまびこ
走行制御装置
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
株式会社タブチ
減圧弁
26日前
WHILL株式会社
電動モビリティ
10日前
株式会社計数技研
移動体、及びプログラム
2日前
株式会社ダイヘン
搬送車
9日前
日本信号株式会社
自走式装置
16日前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社ダイヘン
搬送車
1か月前
株式会社デンソー
診断装置
1か月前
井関農機株式会社
作業車両
1か月前
株式会社アイシン
自律移動体
16日前
株式会社アイシン
自律移動体
16日前
ミツミ電機株式会社
多方向入力装置
1か月前
FCLコンポーネント株式会社
電源回路および検出装置
26日前
株式会社アイシン
自律移動体
16日前
ミツミ電機株式会社
多方向入力装置
1か月前
株式会社アイシン
自律移動体
16日前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ