TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079407
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192037
出願日
2023-11-10
発明の名称
移動体、及びプログラム
出願人
株式会社計数技研
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20250515BHJP(制御;調整)
要約
【課題】追従対象に適切に追従して移動することができる移動体を提供する。
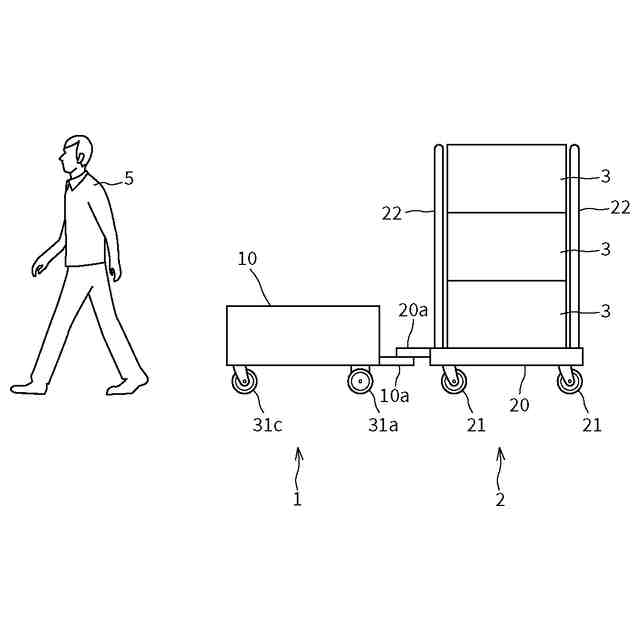
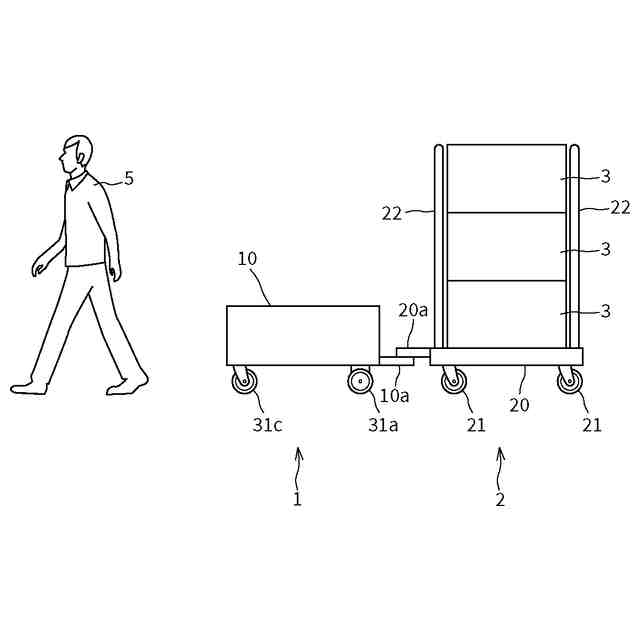
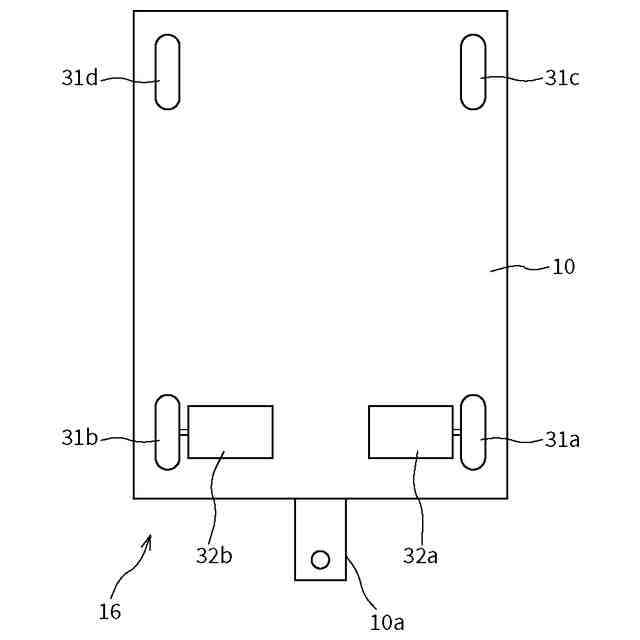
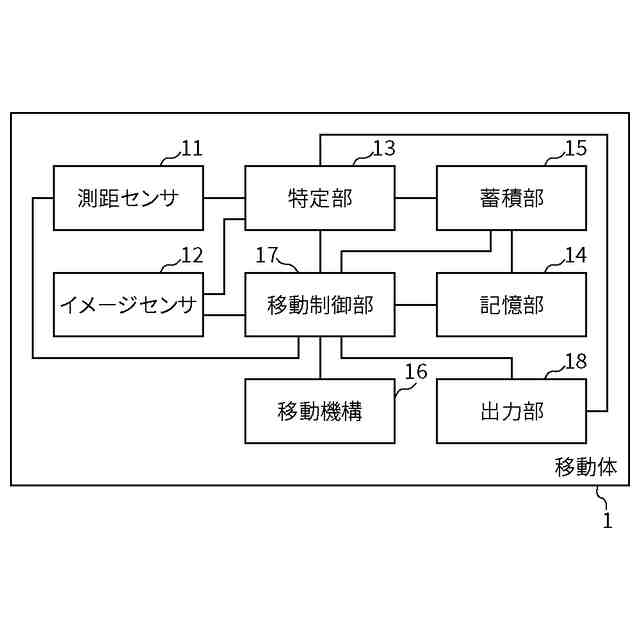
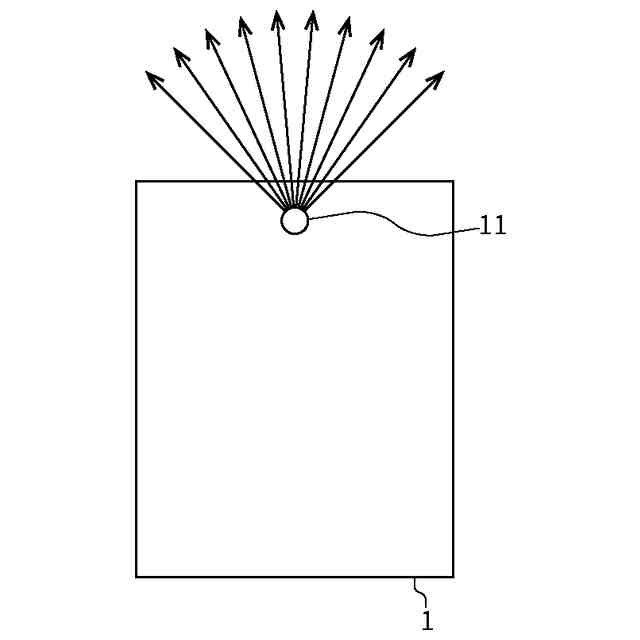
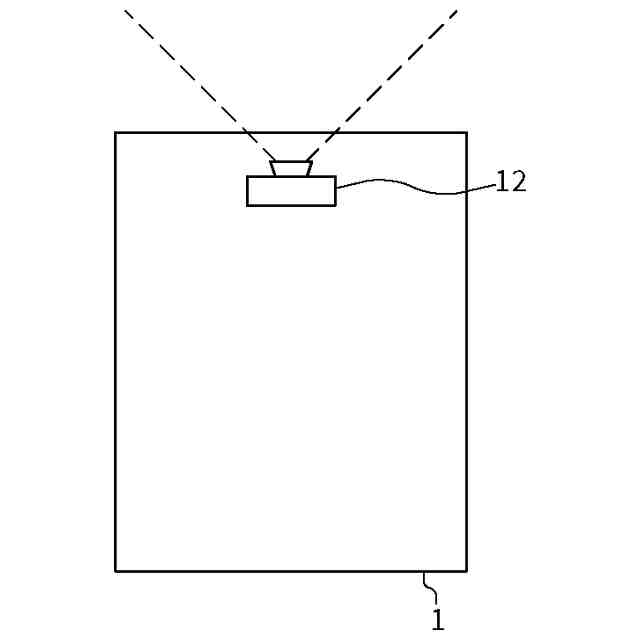
【解決手段】追従対象に追従して移動する移動体1は、複数方向に関して周囲の物体までの距離を測定する測距センサ11と、移動体1の周囲の撮影画像を取得するイメージセンサ12と、移動体1の移動開始時には、イメージセンサ12によって取得された撮影画像において特定した追従対象の領域に対応する測距センサ11の測定結果を用いて、移動体1のローカル座標系における追従対象の位置を特定し、移動体1の移動中には、測距センサ11の測定結果を用いて、ローカル座標系における追従対象の位置を特定する特定部13と、移動体1を移動させる移動機構16と、特定部13によって特定された追従対象に追従するように移動機構16を制御する移動制御部17と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
追従対象に追従して移動する移動体であって、
複数方向に関して周囲の物体までの距離を測定する測距センサと、
前記移動体の周囲の撮影画像を取得するイメージセンサと、
前記移動体の移動開始時には、前記イメージセンサによって取得された撮影画像において特定した追従対象の領域に対応する前記測距センサの測定結果を用いて、前記移動体のローカル座標系における追従対象の位置を特定し、前記移動体の移動中には、前記測距センサの測定結果を用いて、前記ローカル座標系における追従対象の位置を特定する特定部と、
前記移動体を移動させる移動機構と、
前記特定部によって特定された追従対象に追従するように前記移動機構を制御する移動制御部と、を備えた移動体。
続きを表示(約 1,200 文字)
【請求項2】
前記移動体の移動開始時に、視覚的に認識可能な動作に関する動作指示を追従対象に出力する出力部をさらに備え、
前記特定部は、前記イメージセンサによって取得された撮影画像において、前記動作指示に応じた動作を行った追従対象を特定する、請求項1記載の移動体。
【請求項3】
前記移動制御部は、前記移動体と前記追従対象との距離が一定となるように、前記移動体の速度及び加速度の上限以下の範囲内で、前記移動体の速度及び加速度を制御し、
前記追従対象に追従できない場合に、減速する旨の減速指示を追従対象に出力する出力部をさらに備えた、請求項1記載の移動体。
【請求項4】
前記出力部は、減速指示と共に、当該減速指示に応じた理由も出力する、請求項3記載の移動体。
【請求項5】
前記出力部は、同じ理由の出力を繰り返さない、請求項4記載の移動体。
【請求項6】
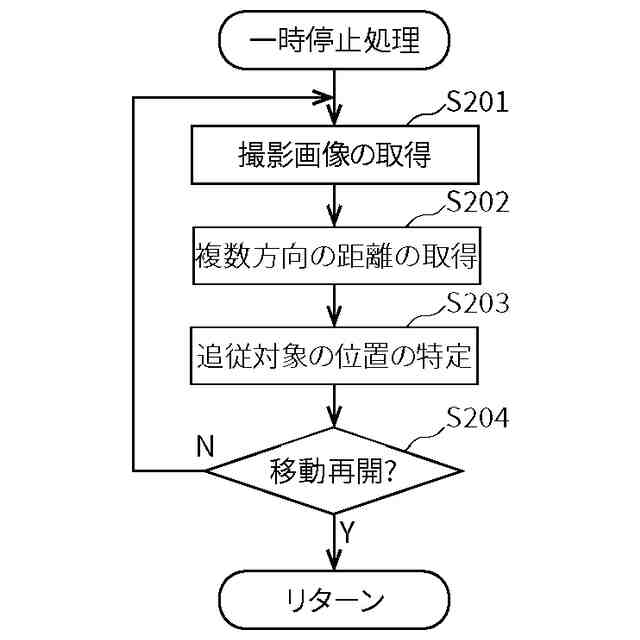
前記特定部は、追従対象が一時停止した場合には、前記イメージセンサによって取得された撮影画像における追従対象の特定と、撮影画像において特定した追従対象の領域に対応する、前記測距センサの測定結果を用いたローカル座標系における追従対象の位置の特定とを繰り返して実行し、
前記移動制御部は、前記追従対象が一時停止した場合には、前記移動体を停止させ、前記追従対象が移動を再開した場合には、前記移動体の前記追従対象への追従を再開させる、請求項1記載の移動体。
【請求項7】
記憶部と、
前記特定部によって特定された追従対象の最新の位置を前記記憶部に蓄積する蓄積部と、をさらに備え、
前記移動制御部は、前記特定部によって追従対象の位置を特定できない場合に、前記蓄積部によって蓄積された、前記追従対象の最新の位置に応じたルートに沿って移動するように前記移動機構を制御する、請求項1から請求項6のいずれか記載の移動体。
【請求項8】
前記ルートは、グローバル座標系においてあらかじめ設定されている複数のルートのうち、前記追従対象の最新の位置に応じたルートである、請求項7記載の移動体。
【請求項9】
前記記憶部では、地図情報が記憶されており、
前記移動制御部は、前記地図情報を用いて、前記特定部によって追従対象の位置を特定できなくなった際の前記移動体の位置から、前記追従対象の最新の位置に応じて予測した位置までのルートを生成する、請求項7記載の移動体。
【請求項10】
前記ルートは、前記移動体のローカル座標系においてあらかじめ設定されている複数のルートのうち、前記追従対象の最新の位置に応じたルートである、請求項7記載の移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、追従対象に追従して移動する移動体等に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、距離センサによる測定結果を用いて、人間に追従して移動する移動体が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2014-178789号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
距離センサを用いることによって、移動体の周囲の物体までの距離を正確に知ることはできるが、人間などの追従対象であるのかどうかを適切に判断することが難しいという問題がある。仮に、移動体が適切な追従対象以外に追従して移動した場合には、想定外の移動になるという問題があった。
【0005】
本発明は、上記課題を解決するためになされたものであり、追従対象に適切に追従して移動することができる移動体等を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の一態様による移動体は、追従対象に追従して移動する移動体であって、複数方向に関して周囲の物体までの距離を測定する測距センサと、移動体の周囲の撮影画像を取得するイメージセンサと、移動体の移動開始時には、イメージセンサによって取得された撮影画像において特定した追従対象の領域に対応する測距センサの測定結果を用いて、移動体のローカル座標系における追従対象の位置を特定し、移動体の移動中には、測距センサの測定結果を用いて、ローカル座標系における追従対象の位置を特定する特定部と、移動体を移動させる移動機構と、特定部によって特定された追従対象に追従するように移動機構を制御する移動制御部と、を備えたものである。
【0007】
このような構成により、撮影画像を用いて追従対象を特定し、その特定した追従対象の位置を測距センサの測定結果を用いて特定することによって、より正確に追従対象の位置を特定することができる。その結果、追従対象に適切に追従して移動することができるようになる。
【0008】
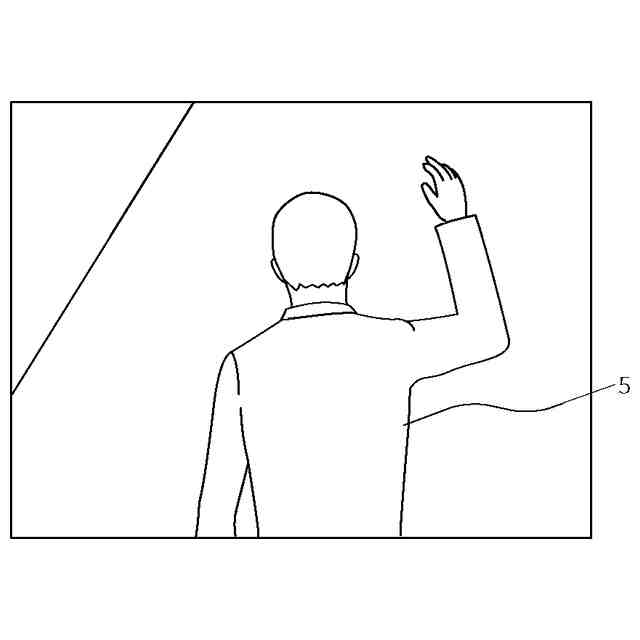
また、本発明の一態様による移動体では、移動体の移動開始時に、視覚的に認識可能な動作に関する動作指示を追従対象に出力する出力部をさらに備え、特定部は、イメージセンサによって取得された撮影画像において、動作指示に応じた動作を行った追従対象を特定してもよい。
【0009】
このような構成により、追従対象をより正確に特定することができるようになる。例えば、撮影画像に複数の人物が含まれる場合であっても、追従対象である人物をより正確に特定することができる。
【0010】
また、本発明の一態様による移動体では、移動制御部は、移動体と追従対象との距離が一定となるように、移動体の速度及び加速度の上限以下の範囲内で、移動体の速度及び加速度を制御し、追従対象に追従できない場合に、減速する旨の減速指示を追従対象に出力する出力部をさらに備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社計数技研
車輪駆動装置
1か月前
個人
生産早送り装置
14日前
株式会社豊田自動織機
産業車両
4日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
個人
作業車両自動化システム
20日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
28日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
ペダル機構
3か月前
トヨタ自動車株式会社
生産管理システム
25日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
14日前
株式会社ダイフク
搬送設備
18日前
株式会社鷺宮製作所
制御装置
2か月前
トヨタ自動車株式会社
減圧弁
22日前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
三菱電機株式会社
自己位置推定装置
3か月前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
トヨタ自動車株式会社
移動体、及び制御方法
3か月前
トヨタ自動車株式会社
クラッチペダル
1日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
アズビル株式会社
制御システムおよび制御方法
28日前
キヤノン電子株式会社
加工システム、及び、加工装置
14日前
キヤノン電子株式会社
加工システム、及び、加工装置
14日前
アズビル株式会社
制御システムおよび制御方法
28日前
株式会社戸張空調
アクセル・ブレーキ操作装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
4日前
株式会社テイエルブイ
減圧弁の制御装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ