TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025113120
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024099193
出願日
2024-06-19
発明の名称
ロボットアームの検査及びキャリブレーション用治具及びその使用方法
出願人
中国計量大学
代理人
個人
主分類
B25J
19/00 20060101AFI20250725BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
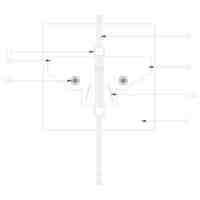
【課題】キャリブレーション及び取付が容易であるという利点を有するロボットアームの検査及びキャリブレーション用治具及びその使用方法を提供する。
【解決手段】加工用ロボットアームの底部には、ロボットアームベースが固定的に接続され、前記ロボットアームベースの底部には、検査及びキャリブレーション用治具ボックスが設けられ、前記検査及びキャリブレーション用治具ボックスの外側には、伝動組立体が設けられ、前記伝動組立体はスクリューを含む。
【選択図】図1
特許請求の範囲
【請求項1】
加工用ロボットアーム(1)を含むロボットアームの検査及びキャリブレーション用治具であって、
前記加工用ロボットアーム(1)の底部には、ロボットアームベース(2)が固定的に接続され、前記ロボットアームベース(2)の底部には、検査及びキャリブレーション用治具ボックス(3)が設けられ、前記検査及びキャリブレーション用治具ボックス(3)の外側には、伝動組立体(4)が設けられ、
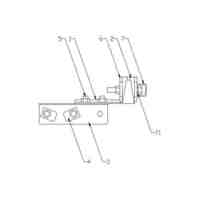
前記伝動組立体(4)は、スクリュー(41)を含み、前記スクリュー(41)は、前記検査及びキャリブレーション用治具ボックス(3)の側壁に摺動可能に接続され、前記スクリュー(41)の内方には、ネジスリーブ(42)が螺接され、前記ネジスリーブ(42)の内方には、位置決めブロック(43)が固定して接続され、前記位置決めブロック(43)は、ロボットアームベース(2)と協働して使用され、
前記検査及びキャリブレーション用治具ボックス(3)の底部には、取付口(5)及び取付口(5)と協働して使用される固定溝(6)が形成され、前記固定溝(6)内には固定ボルト(7)が設けられ、前記固定ボルト(7)はロボットアームベース(2)に螺接され、前記固定ボルト(7)の表面の先端部にはナット(8)が螺接され、
前記検査及びキャリブレーション用治具ボックス(3)の頂部には保護組立体(9)が設けられ、前記位置決めブロック(43)の外側には位置制限組立体(10)が設けられている
ことを特徴とするロボットアームの検査及びキャリブレーション用治具。
続きを表示(約 1,600 文字)
【請求項2】
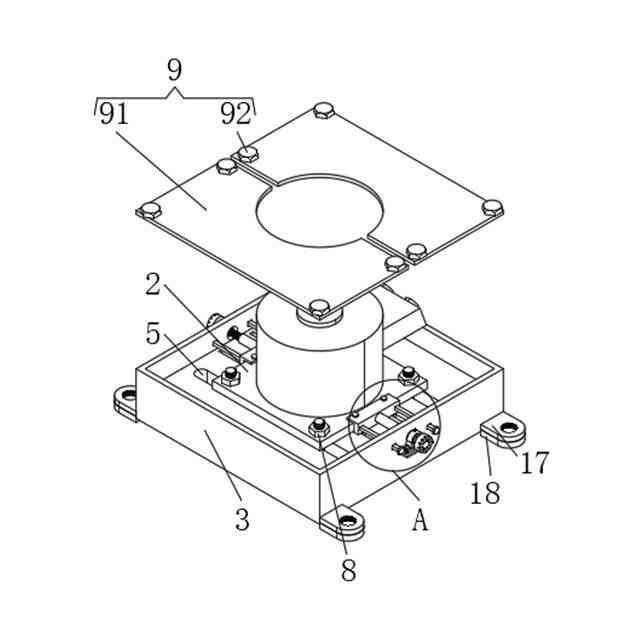
前記保護組立体(9)は保護カバー(91)を含み、前記保護カバー(91)は検査及びキャリブレーション用治具ボックス(3)の頂部に位置し、前記保護カバー(91)の頂部にはネジ(92)が螺接され、前記ネジ(92)は、検査及びキャリブレーション用治具ボックス(3)の頂部に螺接されている
ことを特徴とするロボットアームの検査及びキャリブレーション用治具。
【請求項3】
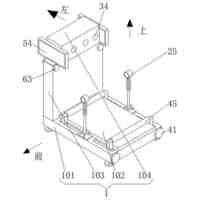
前記位置制限組立体(10)は位置決めロッド(101)を含み、前記位置決めロッド(101)は、検査及びキャリブレーション用治具ボックス(3)に摺動可能に接続され、前記位置決めロッド(101)の内方は位置決めブロック(43)の外方に固定して接続され、前記位置決めロッド(101)の外方には止めブロック(102)が固定して接続されている
ことを特徴とする請求項1に記載のロボットアームの検査及びキャリブレーション用治具。
【請求項4】
前記スクリュー(41)の外方には操作ブロック(11)が固定して接続され、前記スクリュー(41)の表面には軸受座(12)が移動可能に接続されている
ことを特徴とする請求項1に記載のロボットアームの検査及びキャリブレーション用治具。
【請求項5】
前記軸受座(12)の底部には支持板(13)が固定して接続され、前記支持板(13)は、検査及びキャリブレーション用治具ボックス(3)の表面に固定して接続されている
ことを特徴とする請求項4に記載のロボットアームの検査及びキャリブレーション用治具。
【請求項6】
前記位置決めブロック(43)の底部にはスライダ(14)が固定して接続され、前記検査及びキャリブレーション用治具ボックス(3)の底部の内壁には、スライダ(14)に摺動可能に接続されるスライド溝(15)が形成されている
ことを特徴とする請求項1に記載のロボットアームの検査及びキャリブレーション用治具。
【請求項7】
前記検査及びキャリブレーション用治具ボックス(3)の底部には、1つ又は複数の防振パッド(16)が固定して接続され、前記検査及びキャリブレーション用治具ボックス(3)の正面と背面の両方には、取付ブロック(17)が固定して接続され、前記取付ブロック(17)の底部には、パッドブロック(18)が固定して接続されている
ことを特徴とする請求項1に記載のロボットアームの検査及びキャリブレーション用治具。
【請求項8】
請求項1に記載のロボットアームの検査及びキャリブレーション用治具の使用方法であって、
使用者が、加工用ロボットアーム(1)の位置決め及びキャリブレーションを行う必要がある場合、まず、検査及びキャリブレーション用治具ボックス(3)を適切な位置に取り付け、使用者が、加工用ロボットアーム(1)を検査及びキャリブレーション用治具ボックス(3)内に配置してから、操作ブロック(11)を回し、操作ブロック(11)によりスクリュー(41)を回転させ、スクリュー(41)の回転によりネジスリーブ(42)を移動させ、ネジスリーブ(42)の移動により位置決めブロック(43)を加工用ロボットアーム(1)のロボットアームベース(2)に係止することにより、加工用ロボットアーム(1)が移動しないように加工用ロボットアーム(1)を位置決めするステップS1と、
使用者が、固定ボルト(7)を固定溝(6)に挿通し、加工用ロボットアーム(1)のロボットアームベース(2)に螺接してから、ナット(8)を用いて固定ボルト(7)を固定するステップS2と
を含むことを特徴とするロボットアームの検査及びキャリブレーション用治具の使用方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットアームの検査及びキャリブレーション用治具の技術分野に関し、具体的には、ロボットアームの検査及びキャリブレーション用治具及びその使用方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ロボットアームは複数の自由度を持つプログラマブル装置であり、空間の中でさまざまな複雑な動きを行うことができる。ロボットアームは通常、一連のリンクにより構成され、各リンクが一定の範囲内で自由に動くことができるため、ロボットアームはさまざまな異なるタスクを実行できる。ロボットアームは、生産の自動化を実現し、生産性を高めるために工業生産ラインで使用されてもよく、さまざまな危険又は細かい任務を実行するために、医療、宇宙、深海などの分野で使用されてもよい。ロボットアームは、高精度、高効率、高信頼性、高安全性などの利点を含むと同時に、例えばプログラミング及びデバッグ、運用保守などが必要であるなどいくつかの制限がある。現在では、ロボットアームはすでに各分野で広く応用され、また、技術の絶え間ない発展に伴い、ロボットアームの応用の将来性はより広くなるはずである。
【0003】
ロボットアームの取付では、取付位置からのロボットアームのズレを防止するために、取付位置について位置決めする必要がある。現在、人間の手作業により位置決め及び取付を行い、取付の過程では、ロボットアームが揺れてある程度のズレを起こしやすいため、ロボットアームの取付後の位置ズレが引き起こされ、正確度を高める必要性があり、また、ロボットアームの安定性が低下してしまう。
【0004】
したがって、現在人間の手作業により位置決め及び取付を行い、取付の過程においてロボットアームが揺れてある程度のズレを起こしやすいため、ロボットアームの取付後の位置ズレが引き起こされ、正確度を高める必要性があり、また、ロボットアームの安定性が低下してしまうことを効果的に防止するためには、ロボットアームの検査及びキャリブレーション用治具を設計及び改造する必要がある。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述の背景技術において提起された問題を解決するために、本発明の目的は、キャリブレーション及び取付が容易であるという利点を有するロボットアームの検査及びキャリブレーション用治具及びその使用方法を提供することである。現在、人間の手作業により位置決め及び取付を行い、取付の過程では、ロボットアームが揺れてある程度のズレを起こしやすいため、ロボットアームの取付後の位置ズレが引き起こされ、正確度を高める必要性があり、また、ロボットアームの安定性が低下してしまう問題点を解決した。
【課題を解決するための手段】
【0006】
上記目的を実現するために、本発明は以下のような技術案を提案する。加工用ロボットアームを含むロボットアームの検査及びキャリブレーション用治具及びその使用方法によれば、前記加工用ロボットアームの底部には、ロボットアームベースが固定的に接続され、前記ロボットアームベースの底部には、検査及びキャリブレーション用治具ボックスが設けられ、前記検査及びキャリブレーション用治具ボックスの外側には、伝動組立体が設けられ、
前記伝動組立体は、スクリューを含み、前記スクリューは、前記検査及びキャリブレーション用治具ボックスの側壁に摺動可能に接続され、前記スクリューの内方には、ネジスリーブが螺接され、前記ネジスリーブの内方には、位置決めブロックが固定して接続され、前記位置決めブロックは、ロボットアームベースと協働して使用され、
前記検査及びキャリブレーション用治具ボックスの底部には、取付口及び取付口と協働して使用される固定溝が形成され、前記固定溝内には固定ボルトが設けられ、前記固定ボルトはロボットアームベースに螺接され、前記固定ボルトの表面の先端部にはナットが螺接され、
前記検査及びキャリブレーション用治具ボックスの頂部には保護組立体が設けられ、前記位置決めブロックの外側には位置制限組立体が設けられている。
【0007】
本発明として、好ましくは、前記保護組立体は保護カバーを含み、前記保護カバーは検査及びキャリブレーション用治具ボックスの頂部に位置し、前記保護カバーの頂部にはネジが螺接され、前記ネジは、検査及びキャリブレーション用治具ボックスの頂部に螺接される。
【0008】
本発明として、好ましくは、前記位置制限組立体は位置決めロッドを含み、前記位置決めロッドは、検査及びキャリブレーション用治具ボックスに摺動可能に接続され、前記位置決めロッドの内方は位置決めブロックの外方に固定して接続され、前記位置決めロッドの外方には止めブロックが固定して接続されている。
【0009】
本発明として、好ましくは、前記スクリューの外方には操作ブロックが固定して接続され、前記スクリューの表面には軸受座が移動可能に接続されている。
【0010】
本発明として、好ましくは、前記軸受座の底部には支持板が固定して接続され、前記支持板は、検査及びキャリブレーション用治具ボックスの表面に固定して接続されている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
中国計量大学
電子安全クランプ
4日前
中国計量大学
制振型ガイドレール固定システム
22日前
中国計量大学
無人機のテスト用治具及びそのテスト方法
1か月前
中国計量大学
エスカレータの非操作逆転と速度超過防止装置
22日前
中国計量大学
トビイロウンカの抗菌ペプチドの発現を阻害する阻害剤とその応用
2日前
中国計量大学
トビイロウンカのガレクチンNlGAL8遺伝子とその調製および応用
2日前
他の特許を見る







 特許ウォッチ
特許ウォッチ