TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025033715
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023139637
出願日
2023-08-30
発明の名称
産業車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20250306BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】サイドシフト動作中にフォーク側の機構に過剰な負荷が加わることを抑制できる産業車両を提供する。
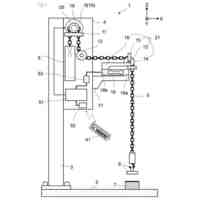
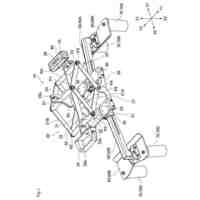
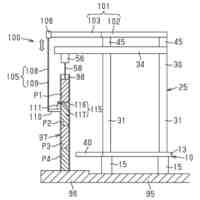
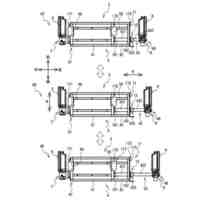
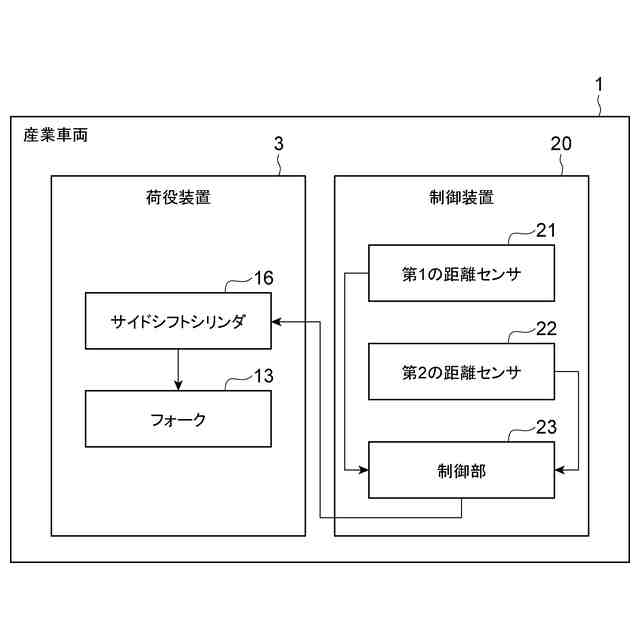
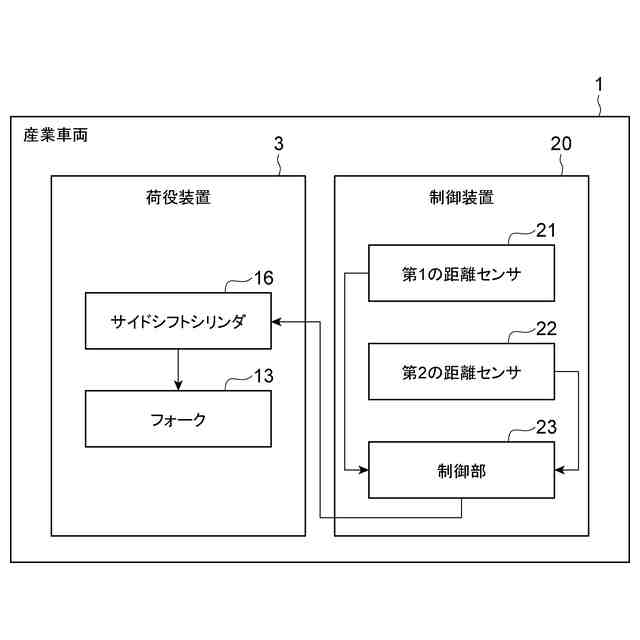
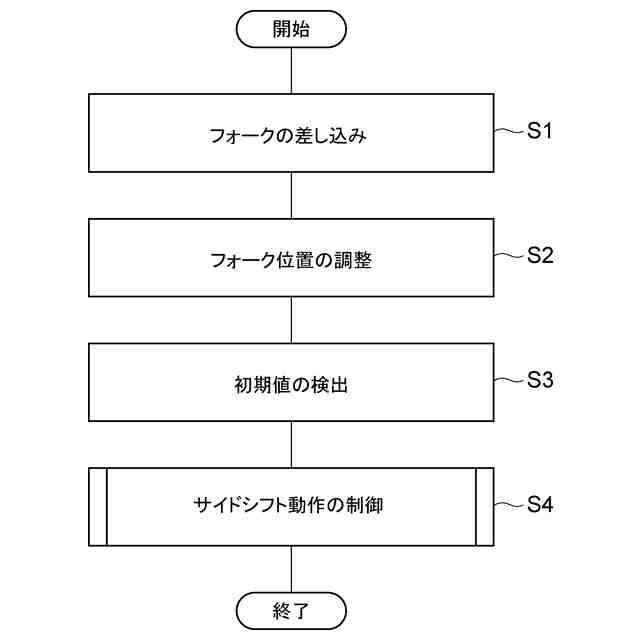
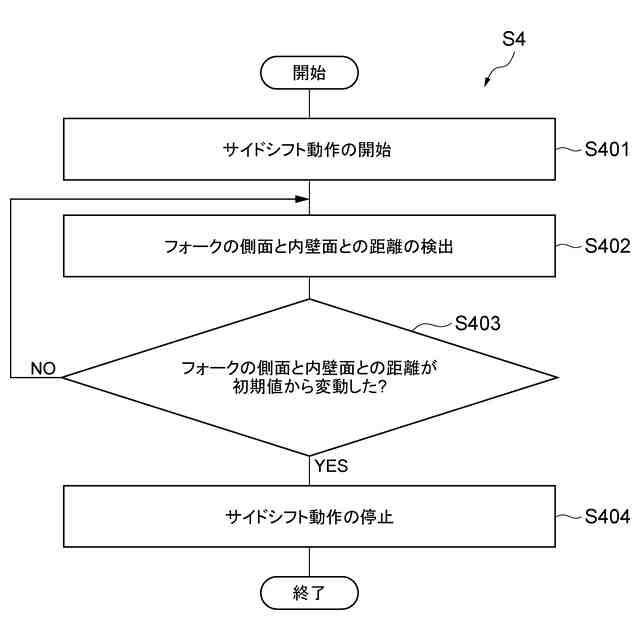
【解決手段】産業車両1は、一対のフォーク13の位置を水平方向にサイドシフトさせるサイドシフト機構と、一対のフォーク13の少なくとも一方の水平方向の側面に設けられ、側面から検出対象物までの距離を検出する距離センサと、距離センサの検出結果に基づいて、サイドシフト機構による一対のフォーク13のサイドシフト動作を制御する制御部23と、を備える。制御部23は、サイドシフト機構によるサイドシフト動作が開始される際のフォーク13の側面と差込孔を画成する内壁面との間の距離の初期値を記憶し、サイドシフト機構によるサイドシフト動作の実行中に、フォーク13の側面と内壁面との間の距離が初期値dsから変動した場合に、サイドシフト機構によるサイドシフト動作を停止させる。
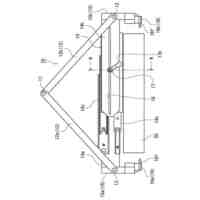
【選択図】図3
特許請求の範囲
【請求項1】
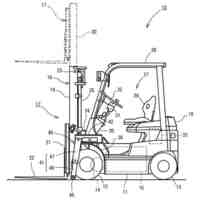
一対のフォークを有する荷役装置を備え、前記一対のフォークをパレットの差込孔に差し込むことで荷役を行う産業車両であって、
前記一対のフォークの位置を水平方向にサイドシフトさせるサイドシフト機構と、
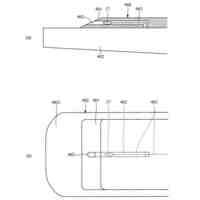
前記一対のフォークの少なくとも一方の前記水平方向の側面に設けられ、当該側面から検出対象物までの距離を検出する距離センサと、
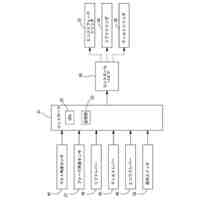
前記距離センサの検出結果に基づいて、前記サイドシフト機構による前記一対のフォークのサイドシフト動作を制御する制御部と、を備え、
前記制御部は、
前記サイドシフト機構による前記サイドシフト動作が開始される際の前記フォークの側面と前記差込孔を画成する内壁面との間の距離の初期値を記憶し、
前記サイドシフト機構による前記サイドシフト動作の実行中に、前記フォークの側面と前記内壁面との間の距離が前記初期値から変動した場合に、前記サイドシフト機構による前記サイドシフト動作を停止させる、産業車両。
続きを表示(約 1,000 文字)
【請求項2】
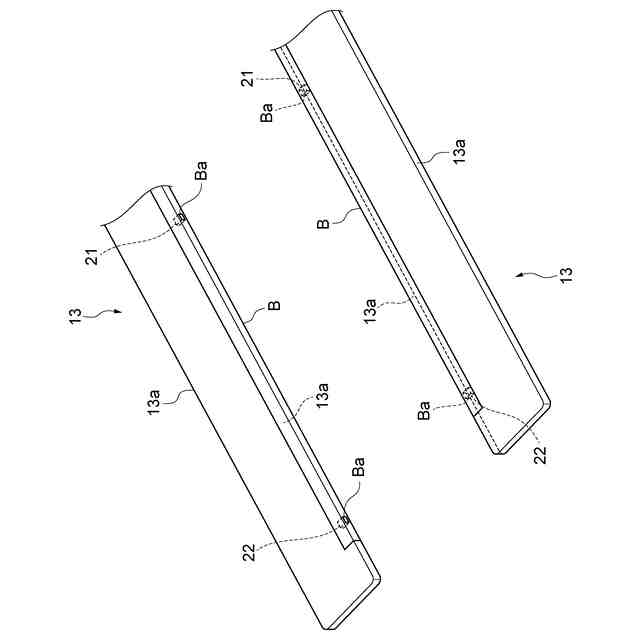
前記距離センサは、前記一対のフォークのそれぞれの側面に互いに反対向きに設けられている、請求項1記載の産業車両。
【請求項3】
前記制御部は、一方のフォークの距離センサが検出した距離が前記初期値より大きくなり、かつ他方のフォークの距離センサが検出した距離が前記初期値から小さくなった場合に、前記サイドシフト機構による前記サイドシフト動作を停止させる、請求項2記載の産業車両。
【請求項4】
前記距離センサは、前記フォークの基端側に位置する第1の距離センサと、前記フォークの先端側に位置する第2の距離センサとによって構成されている、請求項1記載の産業車両。
【請求項5】
前記制御部は、前記第1の距離センサ及び前記第2の距離センサが検出した距離の一方が前記初期値から変動した場合に、前記サイドシフト機構による前記サイドシフト動作を停止させる、請求項4記載の産業車両。
【請求項6】
前記制御部は、前記第1の距離センサ及び前記第2の距離センサが検出した距離の双方が前記初期値から変動した場合に、前記サイドシフト機構による前記サイドシフト動作を停止させる、請求項4記載の産業車両。
【請求項7】
前記制御部は、前記第1の距離センサ及び前記第2の距離センサが検出した距離の一方が前記初期値から変動してから所定時間が経過したときに、前記サイドシフト機構による前記サイドシフト動作を停止させる、請求項4記載の産業車両。
【請求項8】
前記制御部は、前記第1の距離センサ及び前記第2の距離センサが検出した距離の一方が前記初期値から変動してから前記第1の距離センサが検出した距離と前記第2の距離センサが検出した距離とが等しくなった場合に、前記サイドシフト機構による前記サイドシフト動作を停止させる、請求項4記載の産業車両。
【請求項9】
前記距離センサは、前記一対のフォークにおいて相手側のフォークを向く側面に設けられている、請求項1~8のいずれか一項記載の産業車両。
【請求項10】
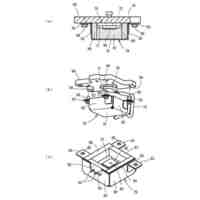
前記一対のフォークには、窓付きのブラケットが設けられ、
前記窓付きのブラケットは、前記距離センサが前記窓から露出するように前記側面に設けられている、請求項1~8のいずれか一項記載の産業車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、産業車両に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
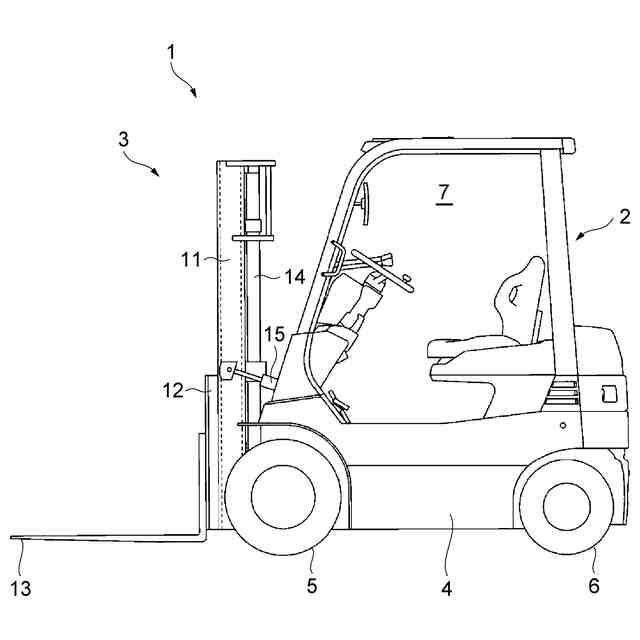
例えば特許文献1には、サイドシフト装置を備えたフォークリフトが記載されている。特許文献1に記載のサイドシフト装置は、マストに沿って昇降するリフトブラケットと、このリフトブラケットに設けられ、フォークが取り付けられたバックレストと、フォークを水平方向(例えば車体の幅方向)にサイドシフトさせるサイドシフト機構とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2021-143039号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
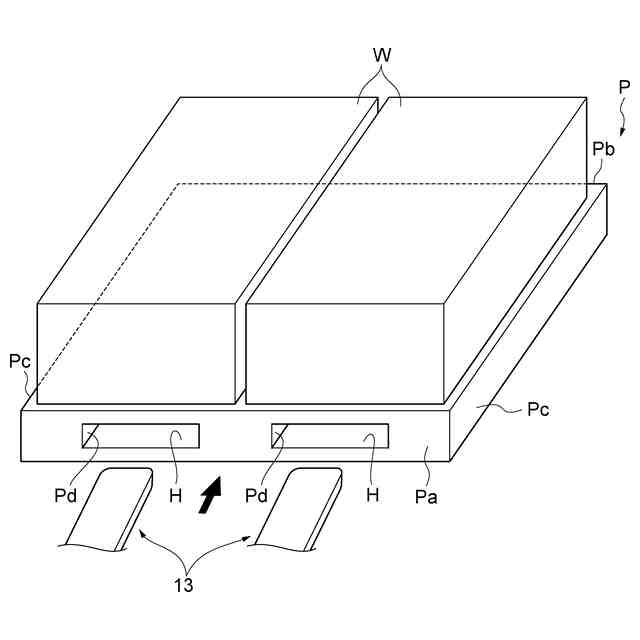
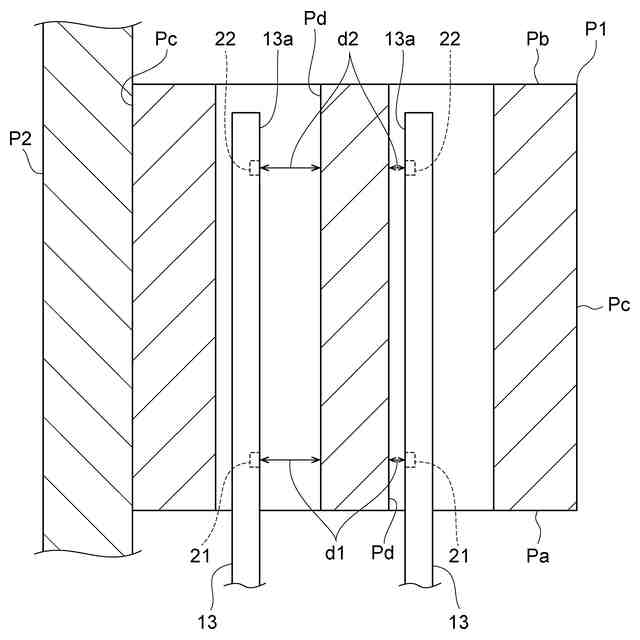
上述した産業車両によってトラックの荷台等への荷物の積み付けを行う際、サイドシフト機構によって隣り合うパレット同士を当接させることで、パレット間に隙間を生じさせないようにパレットを配列する手法が採用される。パレット間の隙間を無くすことで、荷台のスペースの利用効率を高められるほか、輸送中の振動などによる荷物の揺れなどの抑制が図られる。一方、荷物の積み付けの場面では、フォークのサイドシフト動作を自動で行う場合にサイドシフト量が過度になると、積み付け中のパレットが積み付け済みの他のパレットに当たってしまうことが考えられる。この場合、パレットがフォーク上を滑る際の摩擦力や、パレットが他のパレットに当たった後に、フォークがパレットの内壁面を押す力に対する反力がフォークに加わり、フォーク側の機構(フォーク自体やサイドシフト用の油圧シリンダ等)に負荷が加わるおそれがある。
【0005】
本開示は、上記課題の解決のためになされたものであり、サイドシフト動作中にフォーク側の機構に過剰な負荷が加わることを抑制できる産業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一側面に係る産業車両は、一対のフォークを有する荷役装置を備え、一対のフォークをパレットの差込孔に差し込むことで荷役を行う産業車両であって、一対のフォークの位置を水平方向にサイドシフトさせるサイドシフト機構と、一対のフォークの少なくとも一方の水平方向の側面に設けられ、当該側面から検出対象物までの距離を検出する距離センサと、距離センサの検出結果に基づいて、サイドシフト機構による一対のフォークのサイドシフト動作を制御する制御部と、を備える。制御部は、サイドシフト機構によるサイドシフト動作が開始される際のフォークの側面と差込孔を画成する内壁面との間の距離の初期値を記憶し、サイドシフト機構によるサイドシフト動作の実行中に、フォークの側面と内壁面との間の距離が初期値から変動した場合に、サイドシフト機構によるサイドシフト動作を停止させる。
【0007】
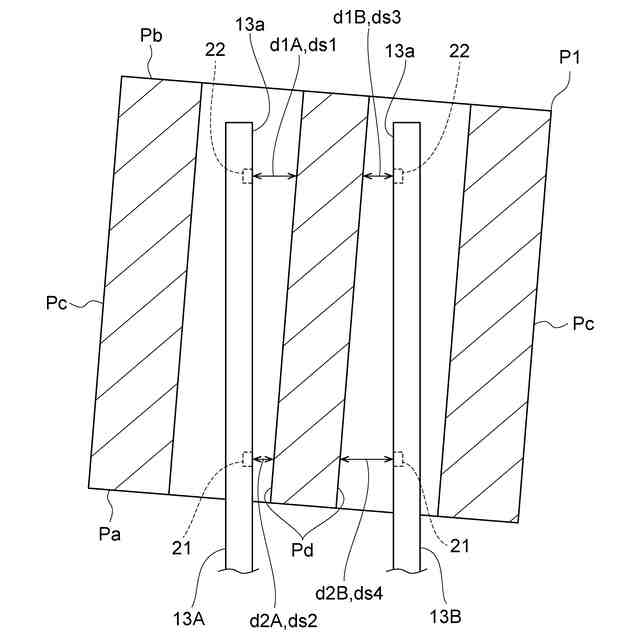
この産業車両では、サイドシフト機構によるサイドシフト動作の停止が、フォークの側面とパレットの内壁面との距離と当該距離の初期値との関係によって決定される。サイドシフト動作中においては、当該動作の開始からパレットと積み付け済みのパレット等と当接されるまでの期間は、フォーク及びパレットの双方が水平方向にシフトする。このため、上記期間においては、距離センサによって検出される距離は、初期値から変動しない。一方で、パレットと積み付け済みのパレット等とが当接した後には、差込孔内においてフォークのみが水平方向に滑り出すため、距離センサによって検出される距離が初期値から変動する。したがって、サイドシフト動作を実行する際、フォークの側面とパレットの内壁面との距離が初期値から変動した場合にサイドシフト動作を停止することによって、差込孔内でのフォークの滑り出しを速やかに検出することが可能となる。これにより、パレットがフォーク上を滑る際の摩擦力や、パレットが他のパレットに当たった後に、フォークがパレットの内壁面を押す力に対する反力がフォークに加わることを防止でき、サイドシフト動作中にフォーク側の機構に過剰な負荷が加わることを抑制できる。
【0008】
距離センサは、一対のフォークのそれぞれの側面に互いに反対向きに設けられていてもよい。この場合、差込孔内でのフォークの滑り出しを精度良く検出できる。
【0009】
制御部は、一方のフォークの距離センサが検出した距離が初期値より大きくなり、かつ他方のフォークの距離センサが検出した距離が初期値から小さくなった場合に、サイドシフト機構によるサイドシフト動作を停止させてもよい。積み付け中のパレットが積み付け済みのパレット等に当接した後は、積み付け中のパレットが差込孔において水平方向の一方向に滑り出す。この際、滑り出しに伴って、一方のフォークの側面とパレットの内壁面との距離は大きくなり、他方のフォークの側面とパレットの内壁面との距離は小さくなる。したがって、距離センサを一対のフォークのそれぞれの側面に互いに反対向きに設け、上述のようにサイドシフト動作を停止することによって、差込孔内でのフォークの滑り出しを精度良く検出できる。
【0010】
距離センサは、フォークの基端側に位置する第1の距離センサと、フォークの先端側に位置する第2の距離センサとによって構成されていてもよい。この場合、差込孔内でのフォークの滑り出しを精度良く検出できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
8か月前
ユニパルス株式会社
吊具
10か月前
個人
海上コンテナ昇降装置
4か月前
ユニパルス株式会社
荷役装置
4か月前
ユニパルス株式会社
吊具装置
5か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
4か月前
水戸工業株式会社
吊り具
1か月前
株式会社豊田自動織機
荷役車両
3か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社日本キャリア工業
昇降機
8か月前
ユニパルス株式会社
荷役助力装置
11日前
白山工業株式会社
バランサ
1か月前
個人
建築部材の吊り上げ装置
6か月前
株式会社ユピテル
システム等
29日前
株式会社キトー
タイヤ用吊具
9日前
株式会社豊田自動織機
フォークリフト
2か月前
フジテック株式会社
エレベータ
3か月前
新英運輸株式会社
自動車用台車
8日前
株式会社大林組
養生方法
7か月前
株式会社豊田自動織機
フォークリフト
10か月前
株式会社ニシキ
可変型吊り天秤
11か月前
株式会社キトー
吊具
7か月前
有限会社サエキ
玉掛用器具
4か月前
ブラザー工業株式会社
架台
10か月前
フジテック株式会社
エスカレータ
1か月前
ウエダ産業株式会社
鋼板保持装置
9か月前
白山工業株式会社
腕重量補償機構
7か月前
ブラザー工業株式会社
架台
10か月前
株式会社タダノ
高所作業車
7か月前
小野谷機工株式会社
ジャッキ装置
10か月前
株式会社スギヤス
車両整備用リフト
5か月前
ダイハツ工業株式会社
荷箱移動装置
11か月前
株式会社スギヤス
車両整備用リフト
5か月前
株式会社キトー
巻上機
10か月前
株式会社慧泉
搬送装置
10か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ