TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042052
公報種別
公開特許公報(A)
公開日
2025-03-27
出願番号
2023148850
出願日
2023-09-14
発明の名称
ミシン
出願人
JUKI株式会社
代理人
個人
,
個人
主分類
D05B
27/10 20060101AFI20250319BHJP(縫製;刺しゅう;タフティング)
要約
【課題】ベルトの交換作業の負担を軽減する。
【解決手段】
被縫製物に当接する搬送ベルト41,42により被縫製物の送りを行う送り装置40を備えるミシン100において、被縫製物の送りの駆動源となるモータ45,46から、動力伝達ベルト411,421を介して、搬送ベルト41,42に搬送力を付与する。
ベルトが搬送ベルトと動力伝達ベルトに分かれていることにより、例えば、モータから針落ち位置までの距離が離隔している場合でも、それぞれのベルト長を短くすることができ、交換作業が容易となる。
【選択図】図9
特許請求の範囲
【請求項1】
被縫製物に当接する搬送ベルトにより前記被縫製物の送りを行う送り装置を備えるミシンにおいて、
前記被縫製物の送りの駆動源となるモータから、動力伝達ベルトを介して、前記搬送ベルトに搬送力を付与することを特徴とするミシン。
続きを表示(約 380 文字)
【請求項2】
前記送り装置は、針板上の前記被縫製物に対して上から前記搬送ベルトを当接させることを特徴とする請求項1に記載のミシン。
【請求項3】
針落ち位置の周囲で前記被縫製物に当接する複数の前記搬送ベルトを有し、
それぞれの前記搬送ベルトごとに前記モータ及び前記動力伝達ベルトを有することを特徴とする請求項1に記載のミシン。
【請求項4】
前記搬送ベルトは、前記動力伝達ベルトよりもベルト長が短いことを特徴とする請求項1に記載のミシン。
【請求項5】
前記搬送ベルトの張力調節機構を有することを特徴とする請求項1に記載のミシン。
【請求項6】
前記張力調節機構は、前記搬送ベルトに当接する転動体と、当該転動体を周回させる偏心軸とを有することを特徴とする請求項5に記載のミシン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ベルト送りを行うミシンに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
針板上の被縫製物に対して上から当接して送りを行うベルトを有する従来のミシンは、一本の無端環状のベルトが長く引き延ばされて、駆動源となるモータのプーリからベルトガイドを通じて針落ち位置近傍のベルト送り足のローラまでの間に掛け渡されていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2006-158497号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のように、長い経路渡ってベルトが掛け渡されている場合、ベルトの交換の際に、経路全体から取り外す作業や経路全体に取り付ける作業が非常に煩雑となり、作業負担が大きかった。特に、モータ側の経路の一部又は全部が筐体やカバーの内側となる場合には、それが顕著となっていた。
【0005】
本発明は、ベルトの交換を容易に行うことをその目的とする。
【課題を解決するための手段】
【0006】
本発明は、
被縫製物に当接する搬送ベルトにより前記被縫製物の送りを行う送り装置を備えるミシンにおいて、
前記被縫製物の送りの駆動源となるモータから、動力伝達ベルトを介して、前記搬送ベルトに搬送力を付与することを特徴とする。
【発明の効果】
【0007】
本発明のミシンは、上記構成により、ベルトの交換を容易に行うことが可能となる。
【図面の簡単な説明】
【0008】
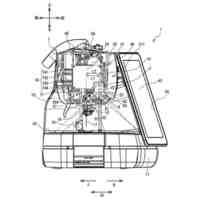
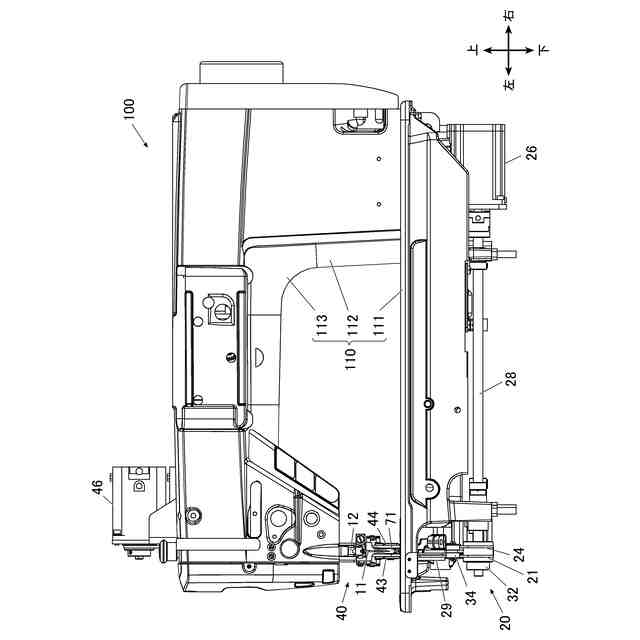
発明の実施形態であるミシンの後面図である。
ミシンの左側面図である。
ミシンの斜視図である。
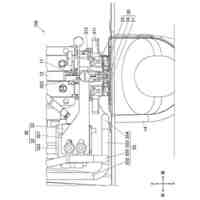
押さえ足の図示を省略したミシンベッド部の左端部上面を示す斜視図である。
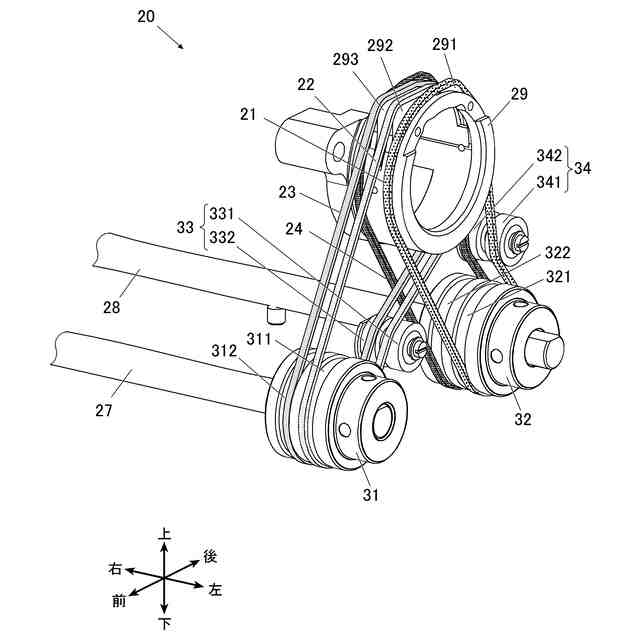
下送り機構のガイド枠の斜視図である。
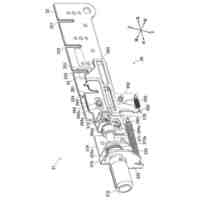
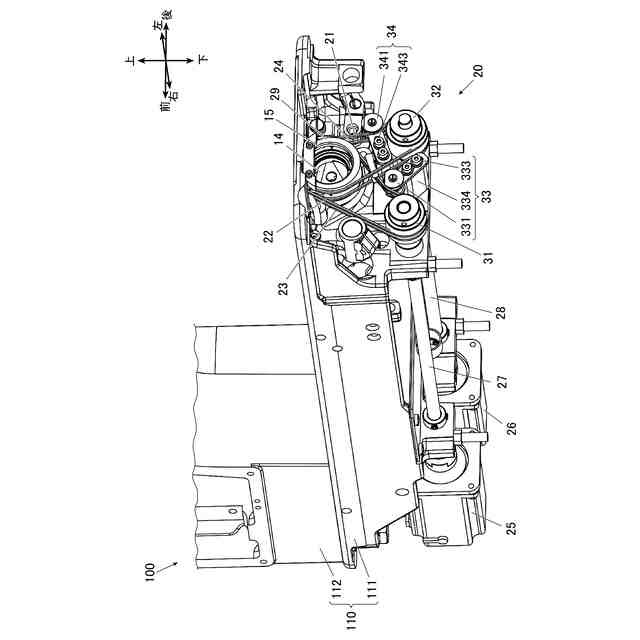
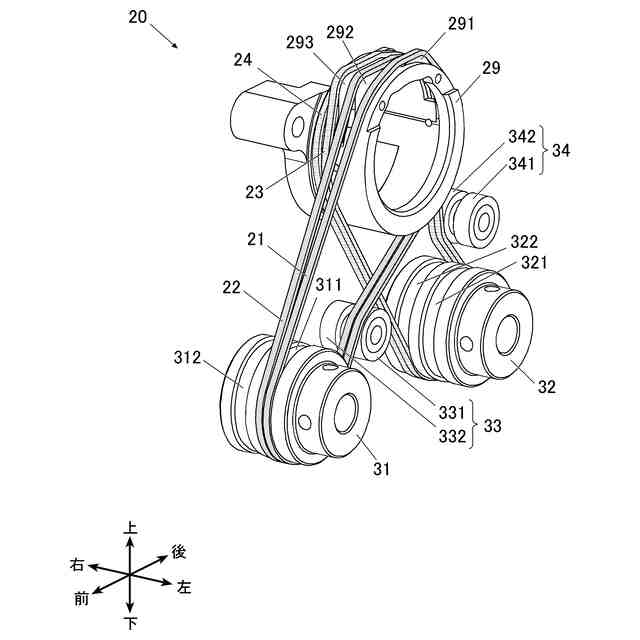
四本の搬送ベルトが前後差動送り状態にある送り機構の斜視図である。
四本の搬送ベルトが左右差動送り状態にある送り機構の斜視図である。
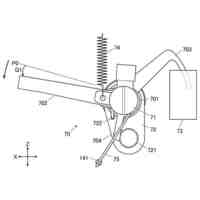
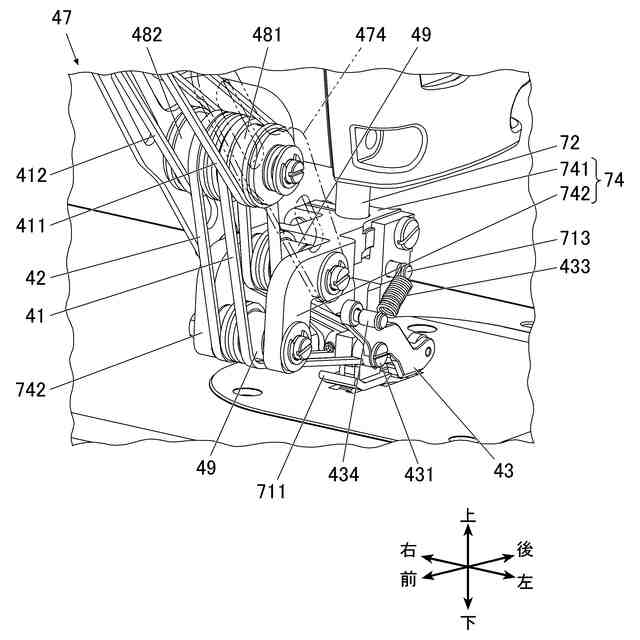
針板上で被縫製物を上から押さえる布押さえ機構周辺の斜視図である。
図8と異なる方向から見た布押さえ機構周辺の斜視図である。
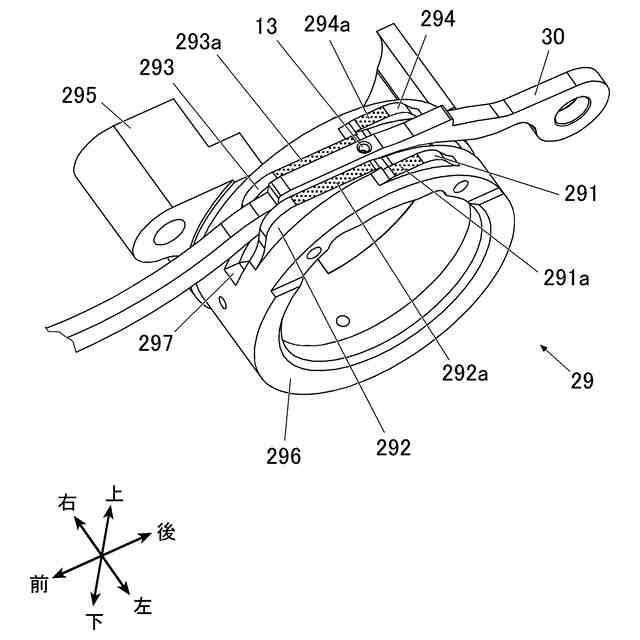
一対の第三テンションローラの周辺を拡大して示した斜視図である。
一方の第三テンションローラを左方から見た側面図である。
針板に直接的に針穴を形成した例を示すミシンベッド部の左端部上面を示す斜視図である。
【発明を実施するための形態】
【0009】
[発明の実施形態の概要]
以下、本発明の実施形態であるミシン100について詳細に説明する。
図1はミシン100の後面図、図2はミシン100の左側面図、図3はミシン100の斜視図を示す。
以下、被縫製物(図12参照)の送り方向下流側を「前」、送り方向上流側を「後」、前を向いた状態で左手側を「左」、右手側を「右」、鉛直上方を「上」、鉛直下方を「下」とする。前後方向、左右方向、上下方向は、互いに直交する。
以下の説明では、ミシン100は水平面に設置されている前提であり、前後方向と左右方向は、水平となる。
【0010】
本発明の実施形態であるミシン100として、いわゆる本縫いミシンを例示する。
ミシン100は、ミシンフレーム110、針上下動機構、下送り機構20、上送り機構40、押さえ機構としての布押さえ機構70、釜機構を備えている。
針上下動機構は、縫い針11に上下動動作を付与する。
下送り機構20は、針板101上の被縫製物に下から送り動作を付与する。
上送り機構40は、針板101上の被縫製物に上から送り動作を付与する。
布押さえ機構70は、針板101上の被縫製物に押さえ圧を付与する。
釜機構は、縫い針11から上糸のループを捕捉して下糸を絡め、縫い目を形成する。
なお、上記ミシン100は、一般的な本縫いミシンが備える、天秤機構、糸調子等の各構成を備えているが、これらは周知のものなので説明は省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
JUKI株式会社
ミシン
17日前
ブラザー工業株式会社
ミシン
20日前
JUKI株式会社
差動送りミシン
8日前
JUKI株式会社
ボタン付け縫製装置
7日前
JUKI株式会社
縁かがり縫いミシン
9日前
JUKI株式会社
ミシン釜のグリース供給構造
14日前
JUKI株式会社
ミシン釜のグリース供給構造
14日前
JUKI株式会社
ミシン釜のグリース供給構造
14日前
他の特許を見る



 特許ウォッチ
特許ウォッチ