TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062378
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171402
出願日
2023-10-02
発明の名称
電磁波処理システム
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
G01S
3/18 20060101AFI20250407BHJP(測定;試験)
要約
【課題】一機のみで全方位観測を行うことを可能とする電磁波処理システムを提供する。
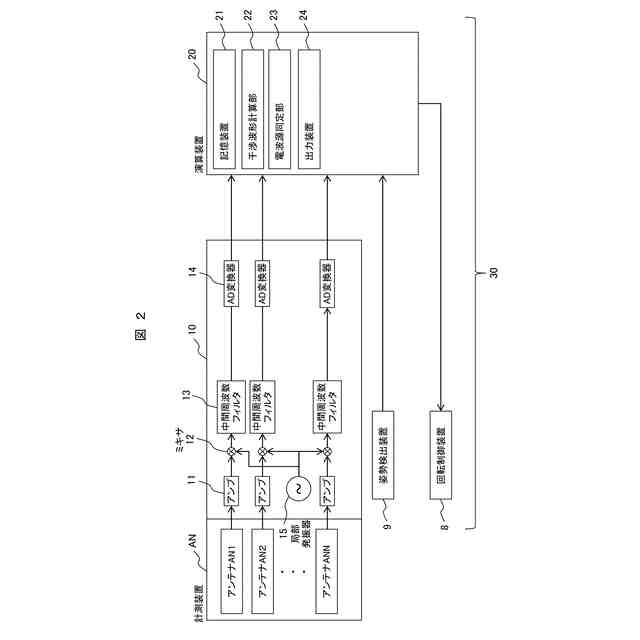
【解決手段】複数のアンテナを持つ宇宙機に搭載される電磁波処理システムであって、電磁波処理システムは、複数のアンテナにより取得した電磁波の計測信号を処理する計測装置と、宇宙機の姿勢を検出する姿勢検出装置と、宇宙機の回転を制御する回転制御装置と、演算装置と、を備え、回転制御装置は、慣性空間に対して複数の回転軸で前記宇宙機を重心周りに自転させ、計測装置は、自転により変化する複数の姿勢において計測を行い、演算装置は、複数の前記姿勢で得られた計測信号において、異なるアンテナから得られた計測信号同士を乗じて得られる干渉波形を用いて、複数のアンテナが取得する電磁波の強度分布を算出することを特徴とする電磁波処理システム。
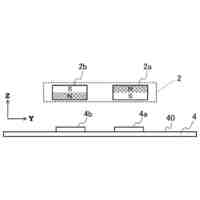
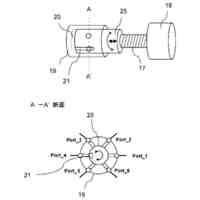
【選択図】図2
特許請求の範囲
【請求項1】
複数のアンテナを持つ宇宙機に搭載される電磁波処理システムであって、
電磁波処理システムは、前記複数のアンテナにより取得した電磁波の計測信号を処理する計測装置と、前記宇宙機の姿勢を検出する姿勢検出装置と、前記宇宙機の回転を制御する回転制御装置と、演算装置と、を備え、
前記回転制御装置は、慣性空間に対して複数の回転軸で前記宇宙機を重心周りに自転させ、
前記計測装置は、前記自転により変化する複数の前記姿勢において計測を行い、前記演算装置は、複数の前記姿勢で得られた前記計測信号において、異なるアンテナから得られた計測信号同士を乗じて得られる干渉波形を用いて、前記複数のアンテナが取得する電磁波の強度分布を算出することを特徴とする電磁波処理システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の電磁波処理システムであって、
前記強度分布は、天球面上または、方位角(アジマス)―仰角(エレベーション)の2次元マップ上に再構成可能であることを特徴とする電磁波処理システム。
【請求項3】
請求項1に記載の電磁波処理システムであって、
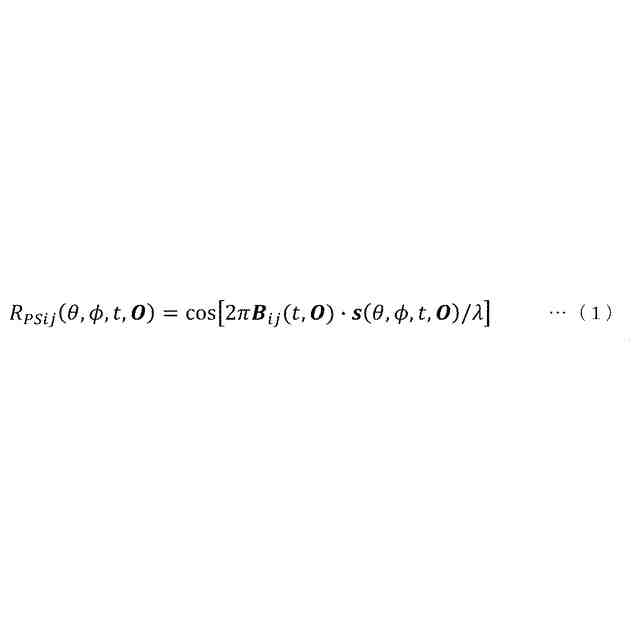
天球面上の各々の位置において点放射源が存在すると仮定した場合の理論干渉強度(干渉縞、もしくはフリンジパターン)と、前記干渉波形との積の時間積分、もしくは相関マップから電磁波源を再構成することを特徴とする電磁波処理システム。
【請求項4】
請求項3に記載の電磁波処理システムであって、
電磁波源形状または大きさを設定する入力装置または受信装置を有し、前記再構成された電磁波源をデコンボリューションすることで、電磁波源を再構成することを特徴とする電磁波処理システム。
【請求項5】
請求項1に記載の電磁波処理システムであって、
計測・回転操作信号出力装置を有し、姿勢が静止状態であること、かつ、所定の基準姿勢であることを判定後、測定開始信号及び回転開始信号を同期して出力することを特徴とする電磁波処理システム。
【請求項6】
請求項5に記載の電磁波処理システムであって、
前記計測・回転操作信号出力装置は、回転数が所定回転数で所定の安定度を保っていることを判定後、測定開始信号を出力することを特徴とする電磁波処理システム。
【請求項7】
請求項1に記載の電磁波処理システムであって、
前記宇宙機に対して相対運動する電磁波源の速度を推定することを特徴とする電磁波処理システム。
【請求項8】
請求項1に記載の電磁波処理システムであって、
電磁波源が放射する電磁波の偏波方向を算出することを特徴とする電磁波処理システム。
【請求項9】
請求項1に記載の電磁波処理システムであって、
第一の指向パターンを有する第一のアンテナアレイと、第二の指向パターンを有する第二のアンテナアレイを有し、
第一のアンテナアレイによる略全方位的観測から目標電磁波源方向の同定、及び第二のアンテナアレイによる高精度観測による目標電磁波源方向の同定、を組み合わせて利用することで対象物を追尾することを特徴とする電磁波処理システム。
【請求項10】
請求項1に記載の電磁波処理システムであって、
編隊飛行する複数の移動体に各々搭載され、互いに時刻同期することで、基線長を伸ばした測定を行うことを特徴とする電磁波処理システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、地球上、及び、宇宙空間に全方位に分布する電波源を観測するために宇宙機に搭載される電磁波処理システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
人工衛星あるいは航空機等の移動体を用いたリモートセンシング分野において、電磁波源の位置を把握する方法は重要な技術である。人工衛星の編隊飛行及びコンステレーションにより広域及び高頻度での観測が可能となるにつれ、当該技術の活用が期待される。具体的には、干渉計型の電波放射計の分野においては、複数のアンテナにより受信される信号を用いた干渉処理で位相差等を観測することによる電磁波到来方向把握方法が提案されている。
【0003】
例えば、特許文献1には、地球軌道上の衛星の測定アンテナのアレイに関してターゲット信号の到来方向を推定する方法が開示されている。また、特許文献2には、面内の互いに異なった方向を向いた複数のアンテナを備え、電磁波到来方向を探索し移動体の移動を制御する制御装置について開示されている。
【先行技術文献】
【特許文献】
【0004】
US2015/0355312
特開2019-56656号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
人工衛星(または衛星とも呼ぶ)あるいは航空機等の移動体(以下本発明では宇宙機というものとする)に搭載された干渉計型の電波放射計は、固定基線長の軌道運動による開口合成処理を実施しており、人工衛星の回転(自転)を使用していなかったため、観測範囲に制約があった。例えば、地球周回軌道から、陸地と海洋を含む地表方向の観測と、地表と逆側の宇宙空間方向の観測を同時に実施することは困難であった。一機の移動体のみで全方位観測する回転型電波干渉計を実現するには、例えば人工衛星に取り付けられた複数アンテナを複数の任意軸周りに回転させ、衛星の自転により変化する複数の姿勢における計測および計測信号の分析を行う必要がある。しかしながら、特許文献1では、衛星を任意軸周りに回転させることは想定していないため、当該課題に関する記述はない。また、特許文献2は、ドローンのような飛行装置に搭載するアンテナを想定しており、装置自体の自転を複数軸で行う観点の記載はない。
【0006】
以上のことから本発明においては、一機のみで全方位観測を行うことを可能とする電磁波処理システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
以上のことから本発明においては、「複数のアンテナを持つ宇宙機に搭載される電磁波処理システムであって、電磁波処理システムは、複数のアンテナにより取得した電磁波の計測信号を処理する計測装置と、宇宙機の姿勢を検出する姿勢検出装置と、宇宙機の回転を制御する回転制御装置と、演算装置と、を備え、回転制御装置は、慣性空間に対して複数の回転軸で前記宇宙機を重心周りに自転させ、計測装置は、自転により変化する複数の姿勢において計測を行い、演算装置は、複数の前記姿勢で得られた計測信号において、異なるアンテナから得られた計測信号同士を乗じて得られる干渉波形を用いて、複数のアンテナが取得する電磁波の強度分布を算出することを特徴とする電磁波処理システム。」としたものである。
【発明の効果】
【0008】
本発明によれば、衛星が複数の回転軸で自転して様々な姿勢を取り、各々の姿勢にて計測を行うことで、一機のみで全方位観測を行うことに繋がる。この際、複数の軸における回転操作と計測を適切に制御し、衛星の姿勢の状態を考慮した観測を行うことができる。
【図面の簡単な説明】
【0009】
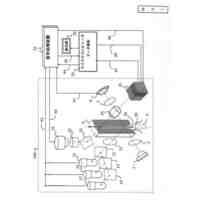
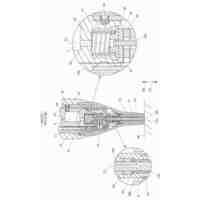
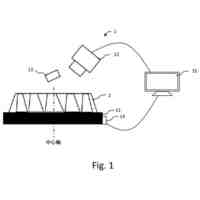
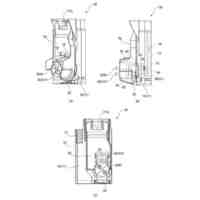
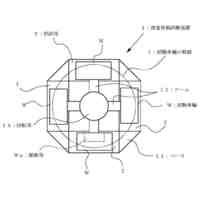
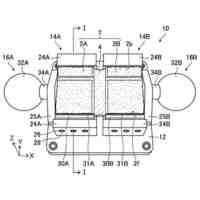
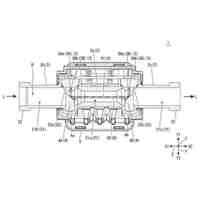
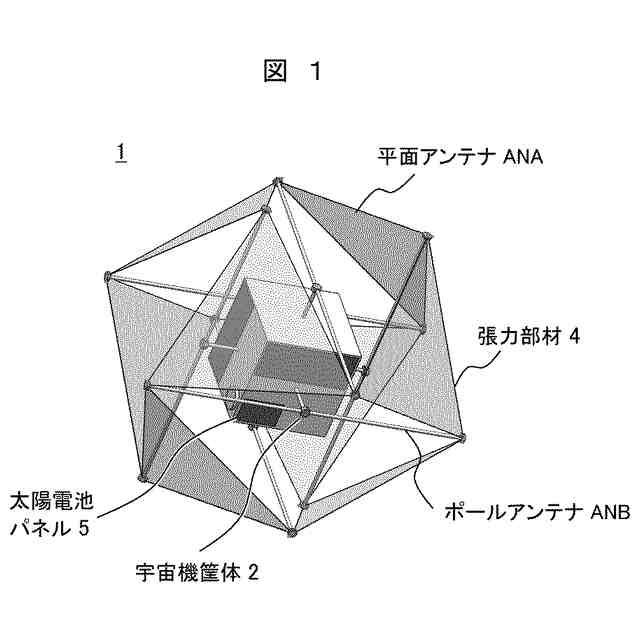
宇宙機の概略構成例を示す図。
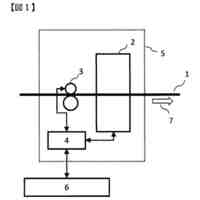
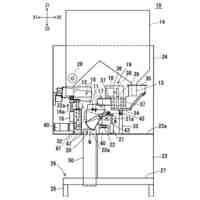
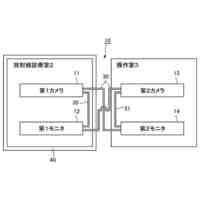
本発明の実施例1に係る電磁波処理システム30の基本構成例を示す図。
本発明の実施例1に係る電磁波処理システム30の演算装置20における処理内容の概略を示すフロー図。
演算装置20における回転計測処理内容の詳細具体例を示すフロー図。
図4で述べた計測処理におけるタイムシーケンスを示す図。
回転計測を実行する際のアンテナ構成、電磁波源の位置関係を示す図。
干渉縞の時系列変化から得られる理論干渉変化パターンを示す図。
図3の処理ステップS33を実行する際の回転軸を示す図。
処理ステップS34の処理により観測された干渉波形Rij(t)の例を示す図。
処理ステップS35の処理により得られた干渉縞マップの例を示す図。
図2の電波源同定部23における電磁波源再構成の処理事例を示す図。
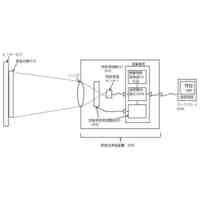
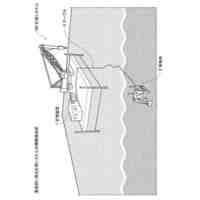
シミュレーションセットアップを示す図。
電磁波源及びアンテナの位置座標を示す図。
電波源位置推定シミュレーション結果を示す図。
電磁波源再構成処理の簡易フロー及び2次元マップ作成の例を示す図。
本発明の実施例2に係る電磁波処理システム30の基本構成例を示す図。
実施例2に係る回転計測のタイムシーケンスを示す図。
移動電磁波源の検出例を示す図。
移動電磁波源の追尾手法を示す図。
複数の宇宙機による編隊飛行の際に同じターゲットを追尾することを示す図。
条件の異なる回転における計測結果を示す図。
本発明の実施例7に係る電磁波処理システム30の演算装置20における処理内容の概略を示すフロー図。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について、図面を用いて説明する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
粒子分析装置
12日前
株式会社イシダ
計量装置
6日前
個人
アクセサリー型テスター
13日前
日本精機株式会社
位置検出装置
29日前
栄進化学株式会社
浸透探傷用濃縮液
19日前
東レ株式会社
シート状物の検査方法
27日前
エイブリック株式会社
電流検出回路
26日前
株式会社ミツトヨ
画像測定機
14日前
株式会社テイエルブイ
振動検出装置
12日前
ダイハツ工業株式会社
試料セル
12日前
株式会社チノー
放射光測温装置
26日前
トヨタ自動車株式会社
検査装置
6日前
日本特殊陶業株式会社
ガスセンサ
26日前
トヨタ自動車株式会社
電気自動車
13日前
日本特殊陶業株式会社
ガスセンサ
26日前
大和製衡株式会社
計量装置
19日前
株式会社 キョーワ
食品搬送装置
26日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
富士電機株式会社
エンコーダ
27日前
理研計器株式会社
ガス検出器
14日前
理研計器株式会社
ガス検出器
14日前
東ソー株式会社
簡易型液体クロマトグラフ
8日前
日本碍子株式会社
ガスセンサ
26日前
株式会社熊谷組
計測システム
19日前
大成建設株式会社
画像表示システム
22日前
リバークル株式会社
荷重移動試験装置
6日前
株式会社 システムスクエア
検査装置
20日前
大和製衡株式会社
表示システム
4日前
株式会社ニコン
検出装置
12日前
株式会社デンソー
試験装置
22日前
TDK株式会社
温度センサ
27日前
東洋計器株式会社
超音波式流量計
19日前
大和ハウス工業株式会社
引張装置
5日前
東洋計器株式会社
超音波式流量計
19日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ