TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025066545
公報種別
公開特許公報(A)
公開日
2025-04-23
出願番号
2023176229
出願日
2023-10-11
発明の名称
移動体
出願人
本田技研工業株式会社
代理人
弁理士法人大島特許事務所
主分類
B60L
3/00 20190101AFI20250416BHJP(車両一般)
要約
【課題】 移動体において、伝達機構の異常を検出する。
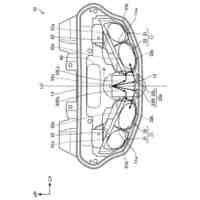
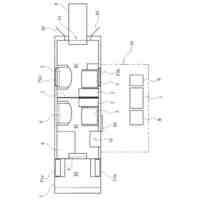
【解決手段】 移動体1は、左右一対の全方向車輪3と、制御装置7とを有する。全方向車輪のそれぞれは、一対のドライブディスク18と、主輪19と、一対の電動モータ20と、一対の伝達機構24と、一対の電流センサ33と、一対の角速度センサ34とを有する。制御装置は、電流センサのそれぞれからの信号に基づいて、電動モータのそれぞれの電流実現値を取得し、電流実現値のそれぞれに基づいて、一対の全方向車輪の各接地点を結ぶ基準線L1に沿った、全方向車輪のそれぞれの駆動力の成分を算出し、全方向車輪のそれぞれの駆動力の基準線に沿った成分の差の絶対値が所定の判定値以上であるときに異常が発生していると判定する。
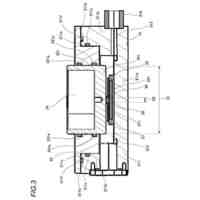
【選択図】 図1
特許請求の範囲
【請求項1】
移動体であって、
車体と、
前記車体に設けられた左右一対の全方向車輪と、
一対の前記全方向車輪を制御する制御装置とを有し、
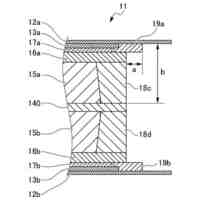
前記全方向車輪のそれぞれは、一対のドライブディスクと、一対の前記ドライブディスクの間に配置された環状の主輪と、前記ドライブディスクのそれぞれを回転させる一対の電動モータと、前記電動モータの回転力を対応する前記ドライブディスクに伝達する一対の伝達機構と、前記電動モータのそれぞれを流れる電流を検出する一対の電流センサと、前記電動モータのそれぞれの角速度を検出する一対の角速度センサとを有し、
前記主輪のそれぞれは、円環状の芯体と、前記芯体に回転可能に支持されると共に、一対の前記ドライブディスクに接触した複数のドリブンローラとを有し、
前記制御装置は、
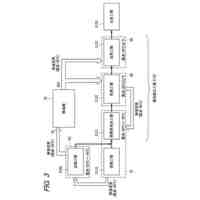
前記車体の前後速度目標値、左右速度目標値、及びヨー角速度目標値に基づいて、前記電動モータのそれぞれの角速度目標値を設定し、前記電動モータのそれぞれの角速度が対応する前記角速度目標値に近づくように前記電動モータのそれぞれをフィードバック制御し、
前記電流センサのそれぞれからの信号に基づいて、前記電動モータのそれぞれの電流実現値を取得し、
前記電流実現値のそれぞれに基づいて、一対の前記全方向車輪の各接地点を結ぶ基準線に沿った、前記全方向車輪のそれぞれの駆動力の成分を算出し、
前記全方向車輪のそれぞれの駆動力の前記基準線に沿った成分の差の絶対値が所定の判定値以上であるときに異常が発生していると判定する移動体。
続きを表示(約 870 文字)
【請求項2】
前記伝達機構のそれぞれは、プーリ及びベルトを含む請求項1に記載の移動体。
【請求項3】
前記制御装置は、前記電動モータのそれぞれに対して、前記角速度目標値と角速度実現値との差に基づいて電流目標値を設定し、前記電流目標値と前記電流実現値との差に基づいて印加電圧を設定する請求項1に記載の移動体。
【請求項4】
移動体であって、
車体と、
前記車体に設けられた左右一対の全方向車輪と、
一対の前記全方向車輪を制御する制御装置とを有し、
前記全方向車輪のそれぞれは、一対のドライブディスクと、一対の前記ドライブディスクの間に配置された環状の主輪と、前記ドライブディスクのそれぞれを回転させる一対の電動モータと、前記電動モータの回転力を対応する前記ドライブディスクに伝達する一対の伝達機構と、前記電動モータのそれぞれを流れる電流を検出する一対の電流センサと、前記電動モータのそれぞれの角速度を検出する一対の角速度センサとを有し、
前記主輪のそれぞれは、円環状の芯体と、前記芯体に回転可能に支持されると共に、一対の前記ドライブディスクに接触した複数のドリブンローラとを有し、
前記制御装置は、
前記車体の前後速度目標値、左右速度目標値、及びヨー角速度目標値に基づいて、前記電動モータのそれぞれの電流目標値を設定し、前記電動モータのそれぞれの電流実現値が対応する前記電流目標値に近づくように前記電動モータのそれぞれをフィードバック制御し、
前記角速度センサのそれぞれからの信号に基づいて、前記電動モータのそれぞれの角速度実現値を取得し、
前記角速度実現値のそれぞれに基づいて、一対の前記全方向車輪の各接地点を結ぶ基準線に沿った、前記全方向車輪のそれぞれの速度の成分を算出し、
前記全方向車輪のそれぞれの速度の前記基準線に沿った成分の差の絶対値が所定の判定値以上であるときに異常が発生していると判定する移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、一対の全方向車輪を有する移動体に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
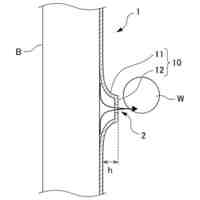
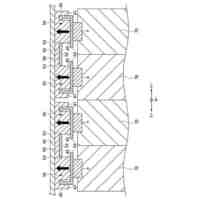
特許文献1は、左右一対の全方向車輪を有する移動体を開示している。全方向車輪のそれぞれは、一対のドライブディスクと、一対のドライブディスクの間に配置された環状の主輪と、ドライブディスクのそれぞれを回転させる一対の電動モータとを有する。電動モータのそれぞれは、対応するドライブディスクと伝達機構によって接続されている。主輪は、円環状の芯体と、芯体に回転可能に支持されると共に、一対のドライブディスクに接触した複数のドリブンローラとを有する。一対の電動モータが対応するドライブディスクを回転させることによって、ドリブンローラが自身の軸線を中心として、又は芯体の軸線を中心として回転し、全方向車輪が前後及び左右を含む任意の方向に並進移動する。また、左右の全方向車輪に回転数の差が生じることによって移動体が旋回する。
【先行技術文献】
【特許文献】
【0003】
特開2023-19525号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような移動体では、伝達機構のいずれかにベルトの脱離やベルトの破断等の異常が発生すると、対応するドライブディスクは電動モータの回転に応じて回転しなくなる。しかし、ドライブディスクは主輪から摩擦力を受けて、主輪と共に回転する。この場合、移動体の挙動に生じる変化が小さく、乗員は異常が生じていることを認識することができない場合がある。しかし、ベルトの脱離やベルトの破断等の異常が伝達機構に生じると、電動モータ又は電動モータに設けられた制動装置によって生じる制動トルクがドライブディスクに伝わらない。そのため、伝達機構の異常は、早期に検出されることが好ましい。
【0005】
本発明は、以上の背景を鑑み、移動体において、伝達機構の異常を検出することを課題とする。
【課題を解決するための手段】
【0006】
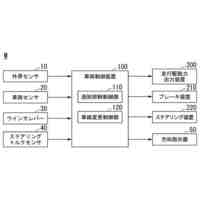
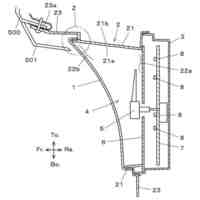
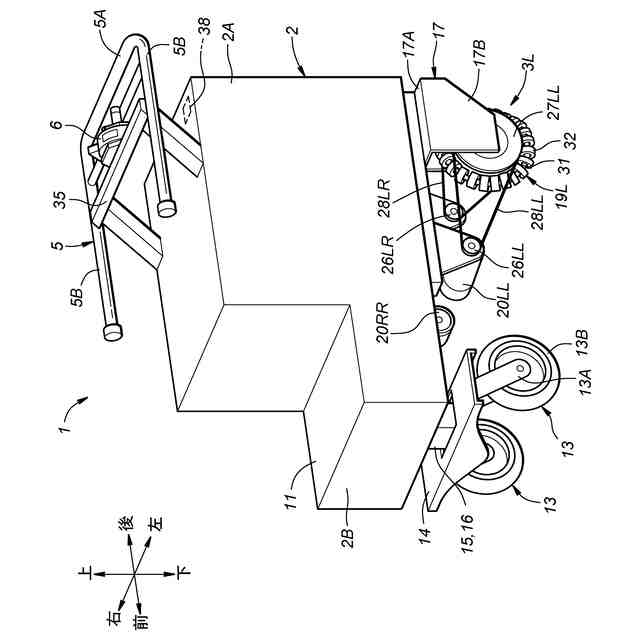
上記課題を解決するために本発明のある態様は、移動体(1)であって、車体(2)と、前記車体に設けられた左右一対の全方向車輪(3)と、一対の前記全方向車輪を制御する制御装置(7)とを有し、前記全方向車輪のそれぞれは、一対のドライブディスク(18)と、一対の前記ドライブディスクの間に配置された環状の主輪(19)と、前記ドライブディスクのそれぞれを回転させる一対の電動モータ(20)と、前記電動モータの回転力を対応する前記ドライブディスクに伝達する一対の伝達機構(24)と、前記電動モータのそれぞれを流れる電流を検出する一対の電流センサ(33)と、前記電動モータのそれぞれの角速度を検出する一対の角速度センサ(34)とを有し、前記主輪のそれぞれは、円環状の芯体(31)と、前記芯体に回転可能に支持されると共に、一対の前記ドライブディスクに接触した複数のドリブンローラ(32)とを有し、前記制御装置は、前記車体の前後速度目標値、左右速度目標値、及びヨー角速度目標値に基づいて、前記電動モータのそれぞれの角速度目標値を設定し、前記電動モータのそれぞれの角速度が対応する前記角速度目標値に近づくように前記電動モータのそれぞれをフィードバック制御し、前記電流センサのそれぞれからの信号に基づいて、前記電動モータのそれぞれの電流実現値を取得し、前記電流実現値のそれぞれに基づいて、一対の前記全方向車輪の各接地点を結ぶ基準線(L1)に沿った、前記全方向車輪のそれぞれの駆動力の成分を算出し、前記全方向車輪のそれぞれの駆動力の前記基準線に沿った成分の差の絶対値が所定の判定値以上であるときに異常が発生していると判定する。
【0007】
この態様によれば、移動体は、各電動モータの電流値実現値に基づいて伝達機構の異常を検出することができる。伝達機構に異常が生じると、正常時と比べて、電動モータに加わるトルクが変化するため、電動モータを流れる電流が変化する。そのため、電動モータを流れる電流から算出される一対の全方向車輪の駆動力が変化する。車体に設けられた一対の全方向車輪は互いに相対移動できないため、全方向車輪のそれぞれの駆動力の基準線に沿った成分は等しくなるように設定される。そのため、全方向車輪のそれぞれの駆動力の基準線に沿った成分の差と判定値とを比較することによって、伝達機構に異常が発生しているか否かを判定することができる。
【0008】
上記の態様において、前記伝達機構のそれぞれは、プーリ及びベルトを含んでもよい。
【0009】
この態様によれば、移動体はベルトの脱落や破断を検出することができる。
【0010】
上記の態様において、前記制御装置は、前記電動モータのそれぞれに対して、前記角速度目標値と角速度実現値との差に基づいて電流目標値を設定し、前記電流目標値と前記電流実現値との差に基づいて印加電圧を設定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
12日前
本田技研工業株式会社
ドア
4日前
本田技研工業株式会社
移動体
13日前
本田技研工業株式会社
加工装置
4日前
本田技研工業株式会社
車両用灯体
13日前
本田技研工業株式会社
全固体電池
4日前
本田技研工業株式会社
車体前部構造
4日前
本田技研工業株式会社
車体前部構造
4日前
本田技研工業株式会社
放射冷却装置
12日前
本田技研工業株式会社
電池モジュール
4日前
本田技研工業株式会社
車両用ドア構造
4日前
本田技研工業株式会社
車両用シール構造
4日前
本田技研工業株式会社
二次電池の製造方法
8日前
本田技研工業株式会社
電解質材料の選択方法
4日前
本田技研工業株式会社
ウインドスクリーン装置
5日前
本田技研工業株式会社
加工装置及び加工プロセス
4日前
本田技研工業株式会社
プログラム及び情報管理装置
12日前
本田技研工業株式会社
プログラム及び情報管理装置
12日前
本田技研工業株式会社
エージェント装置用プログラム
5日前
本田技研工業株式会社
高圧タンク、その製造方法及びその製造装置
6日前
本田技研工業株式会社
車両制御装置、車両制御方法、およびプログラム
12日前
本田技研工業株式会社
運転支援装置、運転支援方法、およびプログラム
6日前
本田技研工業株式会社
自エージェントを支援するための方法、プログラム、記憶媒体および支援システム、ならびに車両
6日前
本田技研工業株式会社
情報提供装置、情報提供方法、およびプログラム
4日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、およびプログラム
4日前
本田技研工業株式会社
制御装置、制御システム、制御方法、及び制御プログラム
4日前
個人
飛行自動車
2か月前
個人
警告装置
20日前
個人
小型EVシステム
22日前
個人
授乳用車両
3か月前
日本精機株式会社
ケース
28日前
日本精機株式会社
表示装置
3か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ