TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071719
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023182132
出願日
2023-10-23
発明の名称
モータ制御装置
出願人
芝浦機械株式会社
,
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
3/12 20060101AFI20250428BHJP(制御;調整)
要約
【課題】位置決め精度を向上させることができるモータ制御装置を提供することを目的とする。
【解決手段】本実施形態によるモータ制御装置は、モータにより動作される駆動機構の位置指令を、1次関数によりモータの位置指令として調整し、モータの角度を検出する角度センサの検出値を、1次関数により駆動機構の検出位置として調整する調整部と、調整部の1次関数による出力と、駆動機構の伝達関数による出力と、の差に基づいて、モータの移動量を補正する移動量補正部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
モータにより動作される駆動機構の位置指令を、1次関数により前記モータの位置指令として調整し、前記モータの角度を検出する角度センサの検出値を、1次関数により前記駆動機構の検出位置として調整する調整部と、
前記調整部の1次関数による出力と、前記駆動機構の伝達関数による出力と、の差に基づいて、前記モータの移動量を補正する移動量補正部と、
を備える、モータ制御装置。
続きを表示(約 380 文字)
【請求項2】
前記移動量補正部は、前記駆動機構の検出位置に基づいて、前記駆動機構の伝達関数を用いて前記モータの移動量に対する補正量を演算する、請求項1に記載のモータ制御装置。
【請求項3】
前記移動量補正部は、前記モータの位置指令に対して、前記モータの移動量の補正を行い、
前記移動量補正部は、前記角度センサの検出値に対して、前記モータの移動量の補正を引く、請求項1に記載のモータ制御装置。
【請求項4】
前記駆動機構の伝達関数は、2次関数である、請求項1に記載のモータ制御装置。
【請求項5】
前記調整部は、電子ギヤである、請求項1に記載のモータ制御装置。
【請求項6】
前記モータと、
前記角度センサと、
をさらに備える、請求項1に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明による実施形態は、モータ制御装置に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
サーボアンプにより機械(駆動機構)の位置決めを行う場合がある。この場合、駆動機構の移動量の最小指令単位に対するモータ移動量の補正は、サーボアンプのギヤ設定により賄われることがある。このギヤ設定は比例(1次関数)であるため、駆動機構がリンク機構といった2次関数の場合、駆動機構の位置決めに若干の誤差が生じる可能性がある。
【先行技術文献】
【特許文献】
【0003】
特開平4-175906号公報
特開平5-337729号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
位置決め精度を向上させることができるモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本実施形態によるモータ制御装置は、モータにより動作される駆動機構の位置指令を、1次関数によりモータの位置指令として調整し、モータの角度を検出する角度センサの検出値を、1次関数により駆動機構の検出位置として調整する調整部と、調整部の1次関数による出力と、駆動機構の伝達関数による出力と、の差に基づいて、モータの移動量を補正する移動量補正部と、を備える。
【図面の簡単な説明】
【0006】
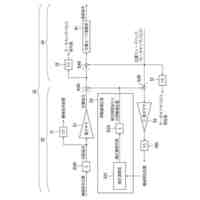
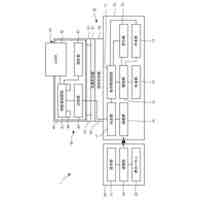
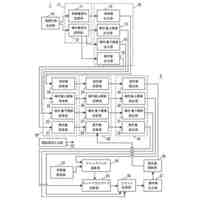
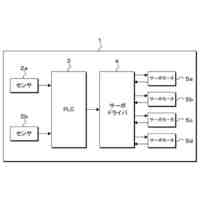
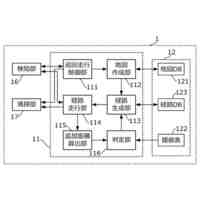
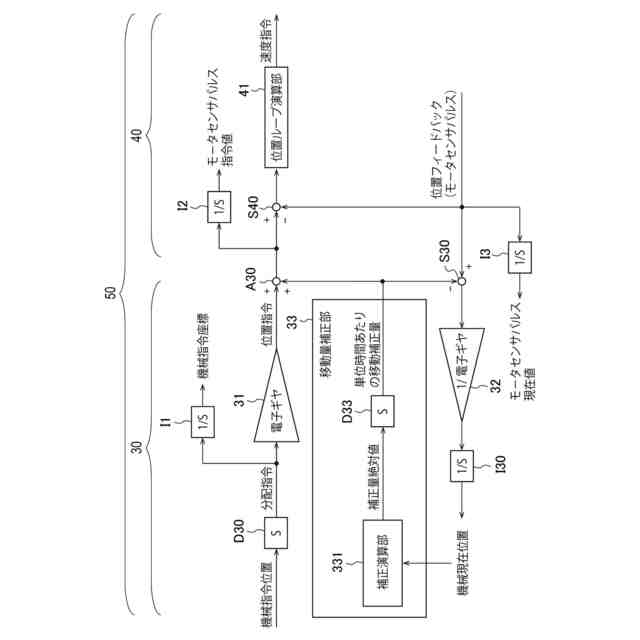
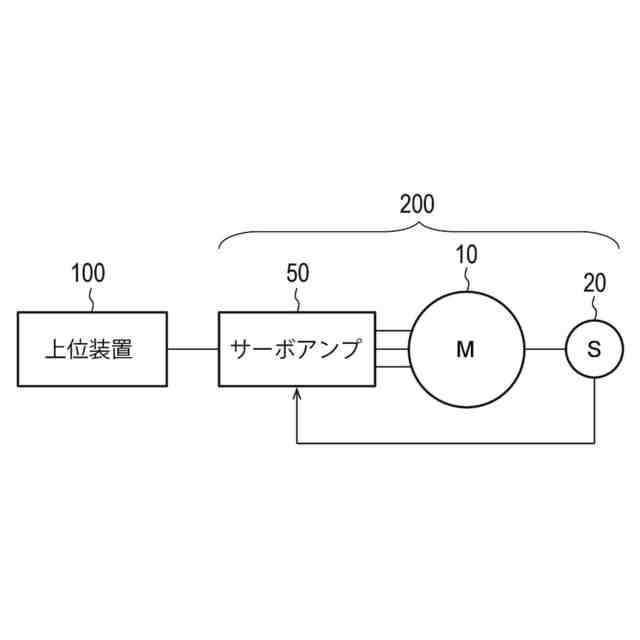
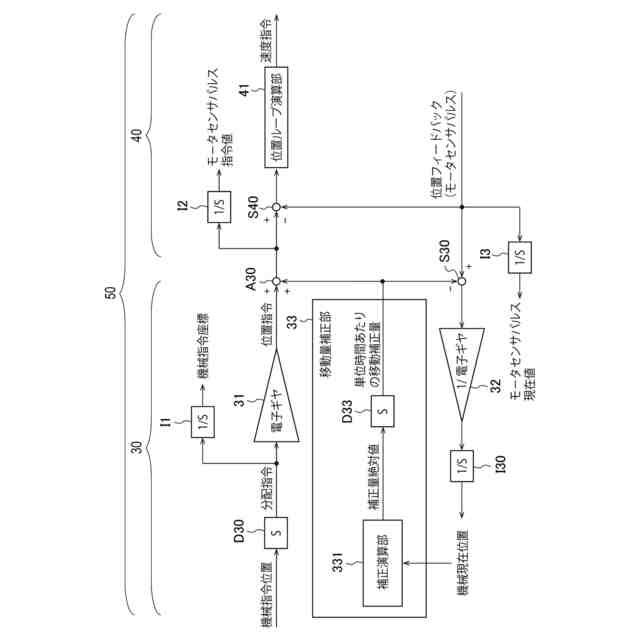
第1実施形態による上位装置およびモータ制御装置の構成の一例を示すブロック図である。
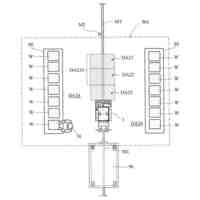
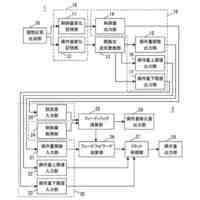
第1実施形態によるサーボアンプの構成の一例を示すブロック図である。
【発明を実施するための形態】
【0007】
以下、図面を参照して本発明に係る実施形態を説明する。本実施形態は、本発明を限定するものではない。図面は模式的または概念的なものであり、各部分の比率などは、必ずしも現実のものと同一とは限らない。明細書と図面において、既出の図面に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
(第1実施形態)
図1は、第1実施形態による上位装置100およびモータ制御装置200の構成の一例を示すブロック図である。
【0009】
上位装置100は、モータ制御装置200に機械指令位置を送信する。機械指令位置は、駆動機構の位置指令である。駆動機構については、後で説明する。
【0010】
モータ制御装置200は、モータ10と、角度検出器20と、サーボアンプ50と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
芝浦機械株式会社
双腕ロボット
今日
芝浦機械株式会社
表面検査装置
15日前
芝浦機械株式会社
モータ制御装置
1日前
芝浦機械株式会社
発泡成形用射出成形機及び発泡成形方法
今日
エイブリック株式会社
基準電圧回路
29日前
和研工業株式会社
多連レバー機構
1か月前
スター精密株式会社
工作機械
1か月前
株式会社クボタ
作業車
1か月前
株式会社ダイフク
搬送車
1か月前
ローム株式会社
半導体集積回路
1か月前
エイブリック株式会社
ボルテージレギュレータ
29日前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社やまびこ
走行制御装置
17日前
愛知機械テクノシステム株式会社
無人搬送車
1か月前
株式会社タブチ
減圧弁
11日前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御装置および制御方法
1か月前
チームラボ株式会社
走行システム及び走行路
1か月前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
株式会社ダイヘン
搬送車
29日前
日本信号株式会社
自走式装置
1日前
株式会社デンソー
診断装置
15日前
井関農機株式会社
作業車両
25日前
村田機械株式会社
稼働監視システム及び稼働監視方法
1か月前
トヨタ自動車株式会社
群制御システム及び群制御方法
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
ローム株式会社
バイアス回路
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
オルガノ株式会社
運転管理方法及び運転管理装置
1か月前
ミツミ電機株式会社
多方向入力装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ