TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074058
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2024188216
出願日
2024-10-25
発明の名称
個別車輪操舵調整器における欠陥を伴う車両を動作させるための方法及び制御装置
出願人
ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング
,
ROBERT BOSCH GMBH
代理人
アインゼル・フェリックス=ラインハルト
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250502BHJP(信号)
要約
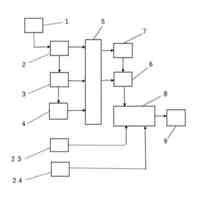
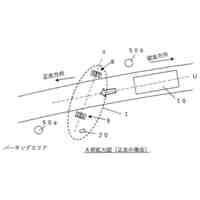
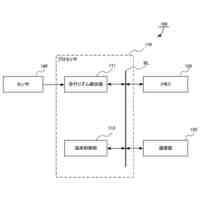
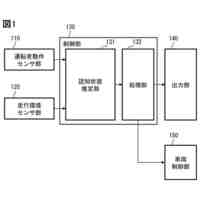
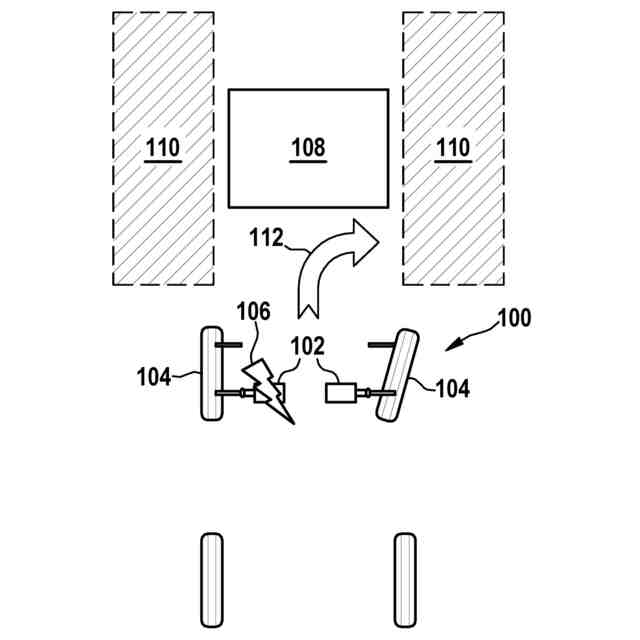
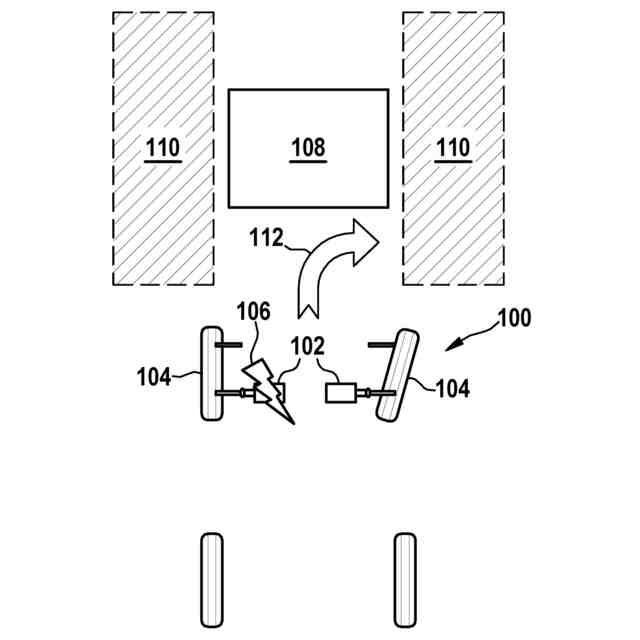
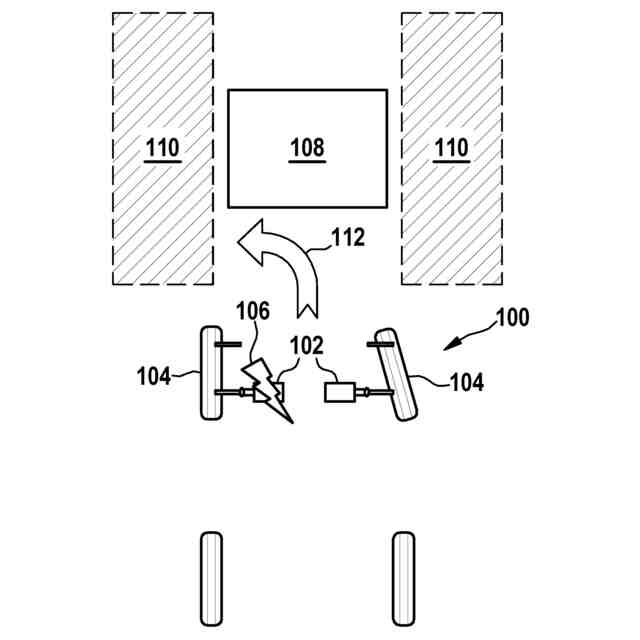
【課題】本発明は、個別車輪操舵調整器(102)における欠陥(106)を伴う車両(100)を動作させるための方法に関する。
【解決手段】本方法においては、衝突を回避するための操舵介入のための回避方向(112)が、車両(100)の速度と欠陥(106)の側とに依存して決定される。
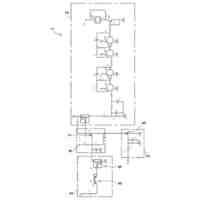
【選択図】図1
特許請求の範囲
【請求項1】
個別車輪操舵調整器(102)における欠陥(106)を伴う車両(100)を動作させるための方法であって、
衝突を回避するための操舵介入のための回避方向(112)が、前記車両(100)の速度と前記欠陥(106)の側とに依存して決定される、方法。
続きを表示(約 820 文字)
【請求項2】
前記回避方向(112)は、さらに、衝突対象物(108)までの距離に依存して決定される、請求項1に記載の方法。
【請求項3】
前記回避方向(112)は、閾値よりも小さい速度の場合、及び/又は、前記欠陥(106)の側から離れる距離値よりも大きい距離の場合に決定される、請求項1又は2に記載の方法。
【請求項4】
前記回避方向(112)は、閾値よりも大きい速度の場合、及び/又は、前記欠陥(106)の側に向かう距離値よりも小さい距離の場合に決定される、請求項1乃至3のいずれか一項に記載の方法。
【請求項5】
前記操舵介入は、好適な回避方向(112)における所要の回避スペース(110)が占有されている場合、不適当なものとして評価される、請求項1乃至4のいずれか一項に記載の方法。
【請求項6】
さらに、衝突を回避するための制動介入のための介入距離が、前記速度、使用可能な回避スペース(110)及び前記欠陥(106)の側に依存して設定される、請求項1乃至5のいずれか一項に記載の方法。
【請求項7】
前記介入距離は、前記回避スペース(110)が占有されている場合に拡張される、請求項5及び6に記載の方法。
【請求項8】
請求項1乃至7のいずれか一項に記載の方法を、対応する装置において実施、実行及び/又は駆動制御するように構成されている制御装置。
【請求項9】
コンピュータプログラム製品であって、当該コンピュータプログラム製品が実行されるときに、プロセッサに請求項1乃至7のいずれか一項に記載の方法を実施、実行及び/又は駆動制御させるために誘導するように構成されているコンピュータプログラム製品。
【請求項10】
請求項9に記載のコンピュータプログラム製品が格納されている機械可読記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、個別車輪操舵調整器における欠陥を伴う車両を動作させるための方法、対応する制御装置、及び、対応するコンピュータプログラム製品に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
車両は、非常ブレーキ支援システムを有し得る。この非常ブレーキ支援システムは、車両が障害物との距離を詰めすぎて衝突する虞がある場合、例えば、車両の運転者が渋滞最後尾を見落とし、それによって、渋滞最後尾における少なくとも1つの車両との衝突が引き起こされ得る場合に、自動化された制動介入によって車両の非常ブレーキを起動することができる。
【0003】
拡張された非常ブレーキ支援システムは、障害物を側方に回避して、さもなければ避けられない衝突を回避するために、又は、急ブレーキの必要性を軽減したりするために、自動化された操舵介入によって車両の回避操作を起動することもできる。例えば、拡張された非常ブレーキ支援システムは、渋滞最後尾に隣接する空いた車線に車両を操舵し、それによって、衝突を回避することができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
発明の開示
このような背景から、本明細書に提示されるアプローチを用いて、独立請求項による、個別車輪操舵調整器における欠陥を伴う車両を動作させるための方法、対応する制御装置、及び、対応するコンピュータプログラム製品が提示される。本明細書に提示されたアプローチの好適な発展形態及び改善形態は、明細書から明らかであり、従属請求項にも記載されている。
【課題を解決するための手段】
【0005】
発明の利点
2本の轍を残す車両には、典型的には、同一の車軸に、それぞれ操舵可能な2つの車輪が設けられている。各車輪には、ここでは、典型的には、1つの固有の個別車輪操舵調整器が割り当てられている。それに応じて、車両は、一般に、相互に独立して操作される駆動制御可能な2つの個別車輪操舵調整器を有する。
【0006】
車両の個別車輪操舵調整器において欠陥が存在する場合、車両の操舵能力が制限される場合がある。例えば、車両は、一方向への操舵が、他方向への操舵よりも大きくすることができないことがある。それにより、衝突を回避するための回避動作がもはや無制限にはできなくなる場合がある。
【0007】
本明細書において提示されるアプローチにおいては、どのくらい速く車両が走行しているかに応じて、欠陥を伴う側の方向に車両を操舵すること、又は、欠陥から遠ざかるように車両を操舵することのいずれがより適当なこととなり得るかという事実を利用したものである。それゆえ、本明細書において提示されるアプローチにおいては、欠陥が登録され、車両のための軌道計画の際に車両の速度とともに考慮される。
【0008】
本明細書において提示されるアプローチによれば、現在の速度に適合する回避方向を事前定義することが可能である。これにより、計画された回避軌道に移ることができなくなるような事態を回避することができる。速度が変化すれば、その際の回避方向も変化し得る。
【0009】
ここでは、個別車輪操舵調整器における欠陥を伴う車両を動作させるための方法であって、衝突を回避するための操舵介入のための回避方向が、車両の速度及び/又は横方向加速度と、欠陥の側とに依存して決定される、方法が提示される。
【0010】
本発明の実施形態に対する観念は、特に、以下に記載する考察及び知識に基づくものとみなすことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
1か月前
個人
自動車ケアフル灯
1か月前
個人
出会い頭事故防止装置
1か月前
個人
忘れ物検出装置
1か月前
能美防災株式会社
発信機
1か月前
ニッタン株式会社
発信機
3日前
ニッタン株式会社
発信機
3日前
個人
逆走・正走車両検出システム
15日前
日本信号株式会社
情報提供システム
14日前
日本信号株式会社
情報管理システム
1か月前
株式会社島津製作所
警報装置
2か月前
ホーチキ株式会社
異常報知設備
3日前
ホーチキ株式会社
監視システム
1か月前
タック株式会社
安全監視システム
1か月前
株式会社JVCケンウッド
通知システム
1か月前
個人
磁気・光学誘導路線による車両の運行制御
8日前
株式会社SUBARU
車速制御システム
1か月前
日本信号株式会社
路側装置及びセンサ装置
1か月前
本田技研工業株式会社
路面評価装置
2か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社フィットネスワン
見守りシステム
1日前
トヨタ自動車株式会社
配車システム
7日前
三菱ロジスネクスト株式会社
搬送システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
本田技研工業株式会社
路面評価装置
2か月前
株式会社アジラ
注目行動呼びかけシステム
1か月前
三菱ロジスネクスト株式会社
搬送システム
1か月前
株式会社デンソー
運転支援装置
1か月前
河村電器産業株式会社
警報装置
1か月前
能美防災株式会社
非常報知システム
22日前
東亜電子工業株式会社
警報コントローラ
1か月前
株式会社 ミックウェア
情報処理装置、情報処理方法
1か月前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社知財事業研究所
運行計画作成システム
2か月前
愛知時計電機株式会社
生活データ集計装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ