TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062227
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171153
出願日
2023-10-02
発明の名称
ロボット、及びロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20250407BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】効率よく放熱させることができる、ロボット、及びロボットシステムを提供する。
【解決手段】第1部材と、前記第1部材に対して相対的に回動するように接続され、金属製のベースと、前記ベースに配置されたモーターと、少なくとも前記モーターを囲う筐体と、前記モーターと接触する受熱部を含む熱伝導部材と、を有する第2部材と、を備え、前記熱伝導部材は、前記ベースと接触する第1面と、前記筐体と接触する第2面と、を有する。
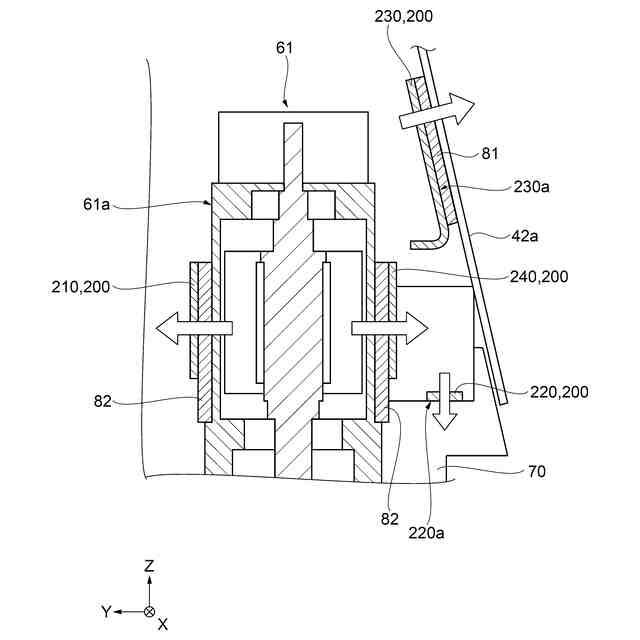
【選択図】図7
特許請求の範囲
【請求項1】
第1部材と、
前記第1部材に対して相対的に回動するように接続され、金属製のベースと、前記ベースに配置されたモーターと、少なくとも前記モーターを囲う筐体と、前記モーターと接触する受熱部を含む熱伝導部材と、を有する第2部材と、
を備え、
前記熱伝導部材は、前記ベースと接触する第1面と、前記筐体と接触する第2面と、を有する、ロボット。
続きを表示(約 630 文字)
【請求項2】
請求項1に記載のロボットであって、
前記筐体は、金属製のプレートを含み、
前記熱伝導部材の前記第2面は、前記プレートと接触する、ロボット。
【請求項3】
請求項2に記載のロボットであって、
前記ベースは、前記プレートよりも体積が大きく、熱容量が高い部材である、ロボット。
【請求項4】
請求項1に記載のロボットであって、
前記熱伝導部材は、板状である、ロボット。
【請求項5】
請求項1に記載のロボットであって、
前記受熱部は、複数設けられている、ロボット。
【請求項6】
請求項1に記載のロボットであって、
前記熱伝導部材は、ブロック状である、ロボット。
【請求項7】
請求項2に記載のロボットであって、
前記ベースには、前記モーターとは異なる他のモーターと、が配置されており、
前記プレートには、前記モーター及び前記他のモーターが接触しない、ロボット。
【請求項8】
請求項1に記載のロボットであって、
前記第1部材は、第1アームであり、
前記第2部材は、第2アームである、ロボット。
【請求項9】
請求項1乃至請求項8のいずれか一項に記載のロボットと、
前記ロボットの駆動を制御する制御装置と、
を有する、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、及びロボットシステムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、熱伝導体を介して、モーターの熱をハウジングに伝達することにより、モーターの熱を効率よく放熱させるロボットの構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014-046398号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の構成では、熱伝導体の放熱経路が1つの部材に限られるため、その部材が熱を持ちやすく、放熱効率が悪いという課題がある。
【課題を解決するための手段】
【0005】
ロボットは、第1部材と、前記第1部材に対して相対的に回動するように接続され、金属製のベースと、前記ベースに配置されたモーターと、少なくとも前記モーターを囲う筐体と、前記モーターと接触する受熱部を含む熱伝導部材と、を有する第2部材と、を備え、前記熱伝導部材は、前記ベースと接触する第1面と、前記筐体と接触する第2面と、を有する。
【0006】
ロボットシステムは、上記に記載のロボットと、前記ロボットの駆動を制御する制御装置と、を有する。
【図面の簡単な説明】
【0007】
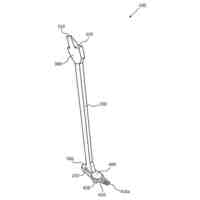
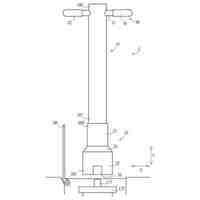
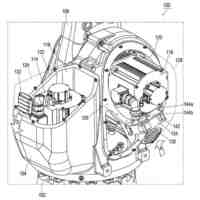
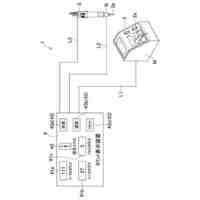
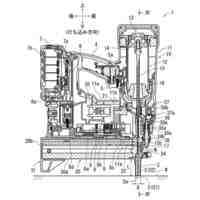
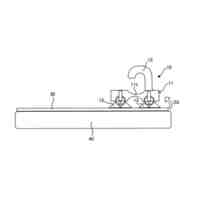
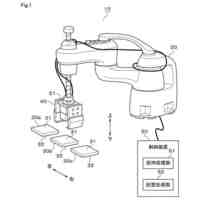
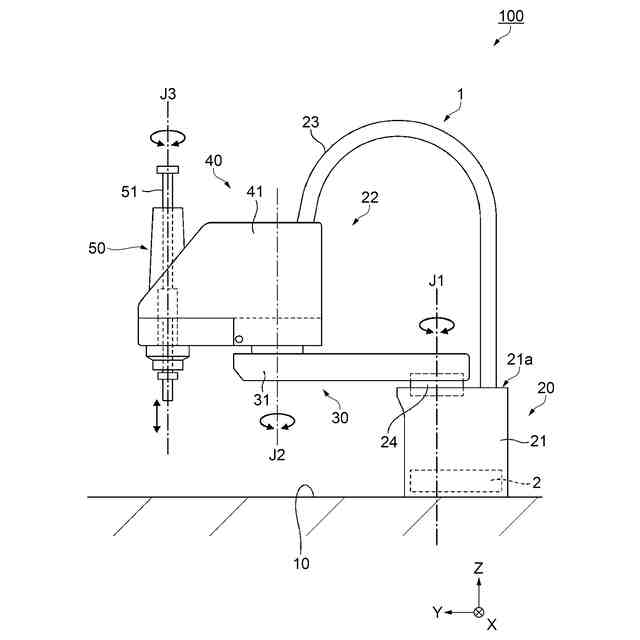
ロボットシステムの構成を示す側面図。
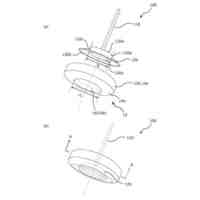
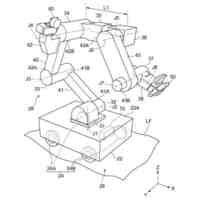
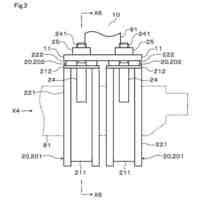
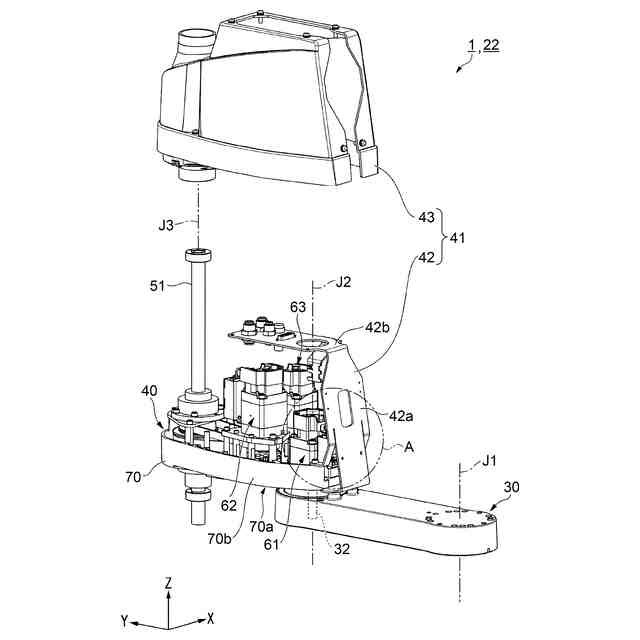
ロボットの第2アームの構成を示す分解斜視図。
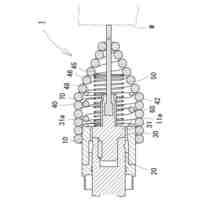
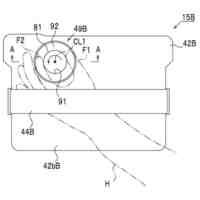
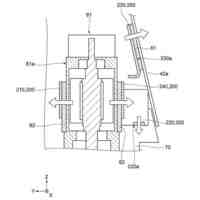
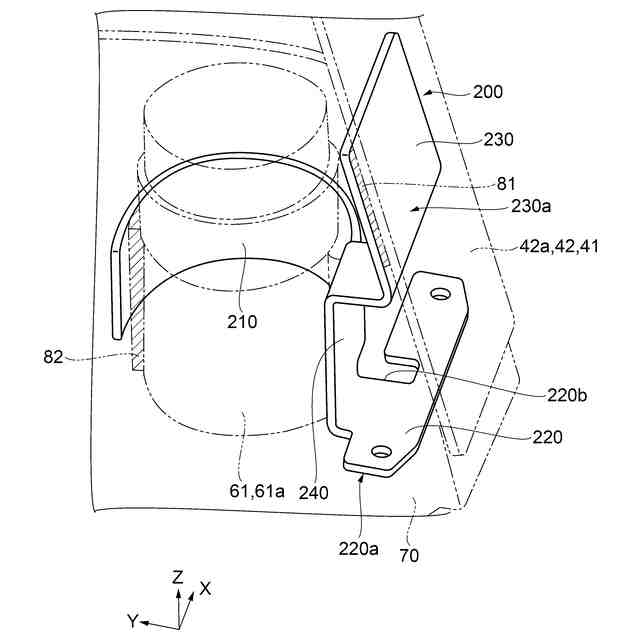
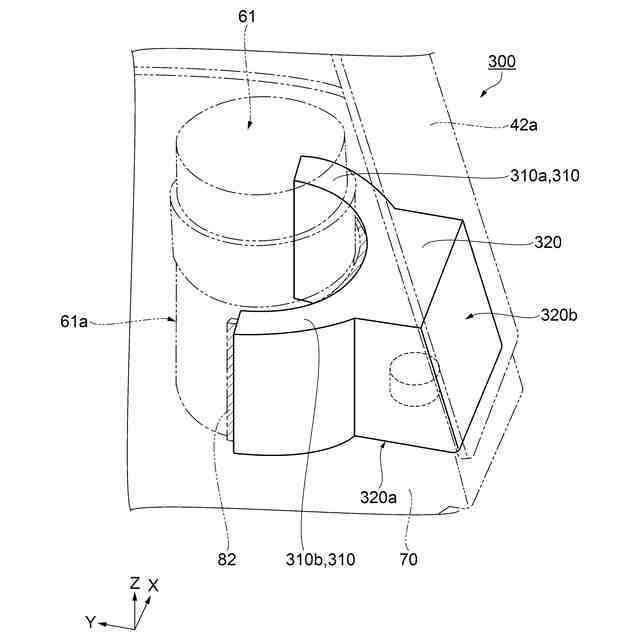
図2に示すロボットのA部を拡大して示す斜視図。
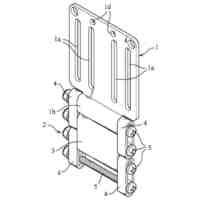
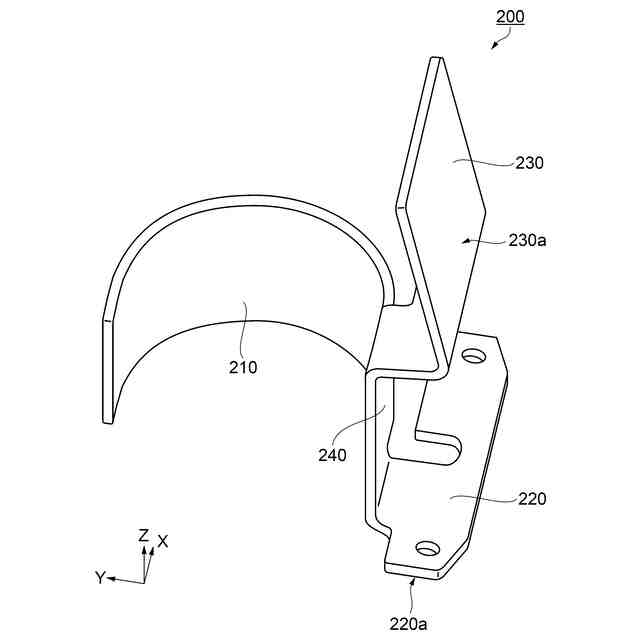
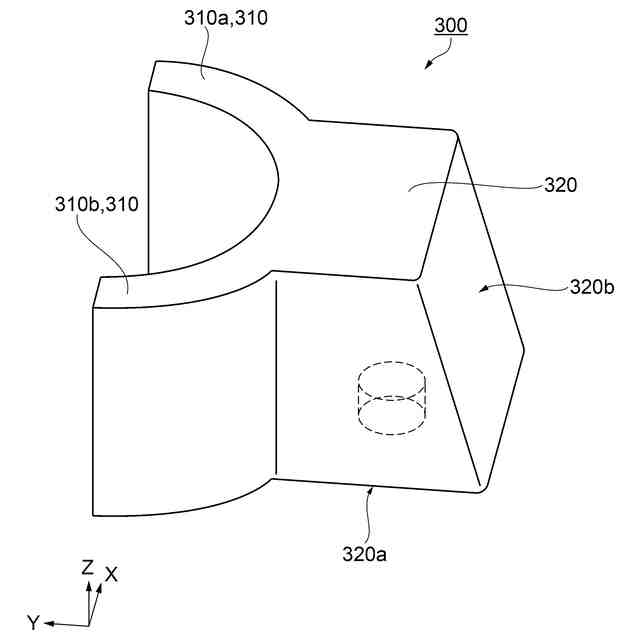
第2アームの熱伝導部材の構成を示す斜視図。
熱伝導部材の構成を示す斜視図。
ベースの構成を示す斜視図。
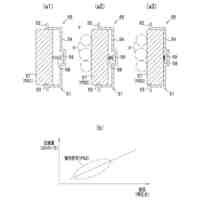
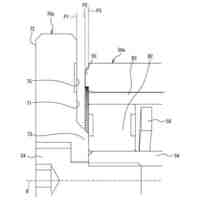
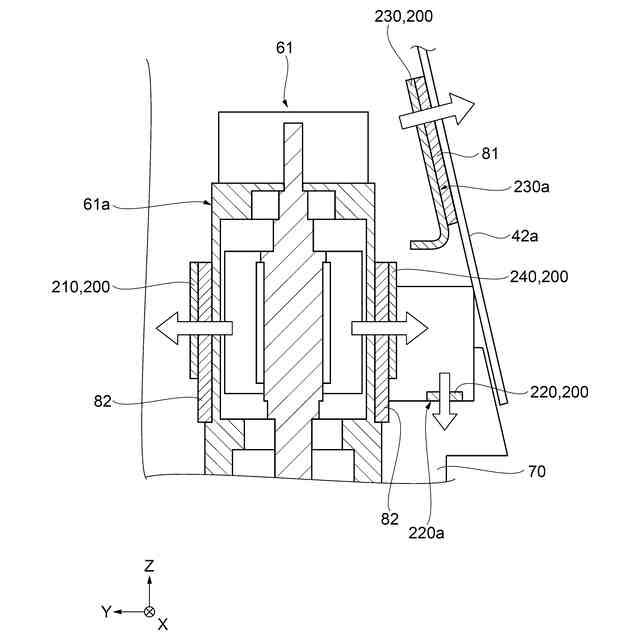
熱伝導部材における放熱経路を示す断面図。
変形例の熱伝導部材の構成を示す斜視図。
変形例の熱伝導部材の構成を示す斜視図。
変形例の熱伝導部材における放熱経路を示す断面図。
変形例の熱伝導部材の構成を示す斜視図。
変形例の熱伝導部材の構成を示す平面図。
変形例の熱伝導部材の構成を示す斜視図。
変形例の熱伝導部材における放熱経路を示す断面図。
【発明を実施するための形態】
【0008】
以下の各図においては、互いに直交する3つの軸を、X軸、Y軸、及びZ軸として説明する。また、X軸に沿う方向を「X方向」、Y軸に沿う方向を「Y方向」、Z軸に沿う方向を「Z方向」とし、矢印の方向が+方向であり、+方向と反対の方向を-方向とする。なお、+Z方向を「上」又は「上方」又は「表側」、-Z方向を「下」又は「下方」又は「裏側」ということもあり、+Z方向及び-Z方向から見ることを平面視あるいは平面的ともいう。また、Z方向+側の面を「上面」又は「表面」、これと反対側となるZ方向-側の面を「下面」又は「裏面」として説明する。
【0009】
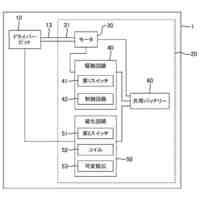
まず、図1を参照しながら、ロボットシステム100の構成を説明する。
【0010】
本実施形態のロボットシステム100は、ロボット1と、ロボット1の駆動を制御する制御装置としてのロボット制御装置2と、を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
15日前
株式会社クレスコ
補助吸着具
8日前
株式会社エビス
腰ベルト用連結具
15日前
個人
深孔スリーブ駆動ロッド構造
28日前
工機ホールディングス株式会社
作業機
23日前
個人
バール
28日前
株式会社イノウ
給油口キャップ用開閉具
1日前
株式会社不二越
垂直多関節ロボット
1日前
アイホン株式会社
ネジ締めカウントシステム
2日前
パナソニック株式会社
工具
1日前
パナソニック株式会社
工具
1日前
株式会社デンソーウェーブ
ロボット制御システム
21日前
アピュアン株式会社
エアー式衝撃工具
18日前
学校法人法政大学
装着型アシスト装置
25日前
三菱電機株式会社
トルク締め個所検出システム
28日前
株式会社マキタ
打ち込み工具
2日前
高丸工業株式会社
ロボット操作システムの動作方法
28日前
株式会社マキタ
インパクト工具
16日前
株式会社マキタ
インパクト工具
16日前
株式会社不二越
ロボットの教示システム及び教示方法
22日前
中国電力株式会社
電動ドライバー
22日前
SB C&S株式会社
治具セット
15日前
オムロン株式会社
モバイルロボット
22日前
オムロン株式会社
モバイルロボット
22日前
JUKI株式会社
ハンドリング装置
1か月前
株式会社ダイヘン
ハンド装置及びハンド装置の制御方法
18日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
22日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
22日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
22日前
株式会社デンソーウェーブ
ロボット制御システム及び停電監視回路
22日前
シナノケンシ株式会社
把持装置
22日前
株式会社星野商店
塗装ロボット用保護カバー
1日前
株式会社デンソーウェーブ
段積みシステムおよび段積み方法
24日前
株式会社デンソーウェーブ
ロボットへの振動工具の取付装置
24日前
セイコーエプソン株式会社
ロボット、及びロボットシステム
18日前
東京ロボティクス株式会社
物体操作方法、ロボット及びプログラム
28日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ